Якоря (роторы) для електроинструмента в Чернигове, Украине по лучшей цене! Огромный выбор с подробным описанием, характеристиками и фото. Электроинструмент и запчасти ☎(066) 303-31-62
Выберите подкатегорию
Сортировка: По умолчаниюНазвание (А – Я)Название (Я – А)Цена (низкая > высокая)Цена (высокая > низкая)Рейтинг (начиная с высокого)Рейтинг (начиная с низкого)Код Товара (А – Я)Код Товара (Я – А)Наличие ▲Наличие ▼
Показать: 25275075100
Индикатор короткозамкнутых витков ИКЗ-3
Ура! Наконец-то это свершилось!Уважаемые ремонтники и мастера по ремонту электроинструмента. Нередко возникал вопрос, ка..
437 грн.
3 отзывов
Показано с 1 по 1 из 1 (всего 1 страниц)
Якорь – это сердце любого
электроинструмента! Ну
и конечно в большинстве случаев – это самая дорогая запчасть. Но не спешите
расстраиваться, ведь на нашем сайте вы можете купить якорь как оригинальный
(фирменный), так и не дорогой китайского или польского производства. У нас есть
якоря на болгарку
Но не спешите
расстраиваться, ведь на нашем сайте вы можете купить якорь как оригинальный
(фирменный), так и не дорогой китайского или польского производства. У нас есть
якоря на болгарку
,
якоря для перфоратора, якоря для цепных боковых
и прямых пил, якоря для дрелей, ну, в общем для любого электроинструмента.
Главным нашим преимуществом перед другими сайтами является то, что мы помимо
интернет-магазина ещё и успешный сервисный центр, мастерская по ремонту
электроинструмента. Мы устанавливаем якоря, которые сами и продаем, поэтому у
нас только качественные запчасти любых производителей, таких как Протон, Зенит, Вектор, DWT, Pro-craft, Stern, Makita, Bosch, Sparky, Интерскол,
Буран, Фиолент, Тандем, Иж-иаш, Stromo и другие.
Нам не выгодно продавать якоря плохого качества, ведь при установке якоря
нашими мастерами, мы даем на них гарантию и разговором по телефону не
отвертеться, потому как мы реальный сервис и с реальным адресом, а не
подвальный интернет магазин.
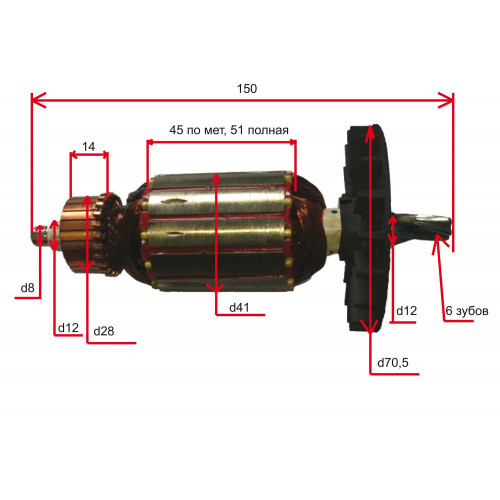
На цепных пилах с прямой посадкой двигателя якорь может сгореть вместе со статором. Поэтому не забывайте проверять и статор на электроинструменте. Статора у нас тоже есть в продаже. На перфораторе или дрели не забывайте сверять число зубьев и угол их наклона.
Если вы чувствуете, что ремонт вашего электроинструмента обойдётся вам очень дорого, то на нашем сайте вы можете также подобрать любой электроинструмент по оптовой цене или распродаже.
Когда не удается подобрать нужный якорь по размерам, то Вы можете заказать у нас его качественную перемотку с полной заменой коллектора. Главное чтобы зубья на нем были целые.
При покупке у нас нового якоря настоятельно рекомендуем также заменить все подшипники на новые. Так как в 70% всех случаем якорь сгорает из-за изношенных подшипников. Проверьте и замените, если нужно и угольные щётки для вашего инструмента. При возникновении сложностей с заменой подшипников – у нас есть специальные съемники подшипников, которые помогут вам в этом.

В нашем каталоге якорей есть детальное описание размеров. И если вы не нашли нужного вам якоря для болгарки например по производителю, то вы можете с лёгкостью подобрать якорь другого производителя, главное только чтобы совпадали размеры. Хорошего Вам времени суток и приятных покупок на нашем сайте!
Двигатель переменного тока– основные свойства, терминология и теория Двигатель переменного тока
преобразует электрическую энергию в механическую. В двигателе переменного тока используется переменный ток, другими словами, направление тока периодически меняется. В случае обычного переменного тока, который используется на большей части территории Соединенных Штатов, ток меняет направление 120 раз в секунду. Этот ток называется «переменный ток 60 циклов» или «переменный ток 60 Гц» в честь г-на Герца, который первым придумал концепцию переменного тока. Другая характеристика текущего потока состоит в том, что он может изменяться по количеству. Например, поток может встречаться в 5 ампер, 10 ампер или 100 ампер.
Было бы довольно трудно, если бы ток, скажем, 100 ампер в один момент протекал в положительном направлении, а затем протекал с такой же силой в отрицательном направлении. Вместо этого, по мере того, как ток готовится изменить направление, он сужается до тех пор, пока не достигнет нулевого потока, а затем постепенно нарастает в другом направлении. Максимальный ток (пики линии) в каждом направлении превышает указанное значение (в данном случае 100 ампер). Поэтому указанное значение дано как среднее. Важно помнить, что сила магнитного поля, создаваемого электромагнитной катушкой переменного тока, увеличивается и уменьшается с увеличением и уменьшением этого переменного тока.
Магазин ПРИВОДЫ ПЕРЕМЕННОГО ТОКА
Двигатель переменного тока состоит из двух основных электрических частей: «статора» и «ротора», как показано на рисунке 8. Статор является неподвижным электрическим компонентом. Он состоит из группы отдельных электромагнитов, расположенных таким образом, что они образуют полый цилиндр, причем один полюс каждого магнита обращен к центру группы. Термин «статор» происходит от слова «стационарный». Тогда статор является неподвижной частью двигателя. Ротор представляет собой вращающийся электрический компонент. Он также состоит из группы электромагнитов, расположенных вокруг цилиндра, полюса которых обращены к полюсам статора. Ротор расположен внутри статора и закреплен на валу двигателя. Термин «ротор» происходит от слова вращающийся. Таким образом, ротор является вращающейся частью двигателя. Задача этих компонентов двигателя — заставить вращаться ротор, который, в свою очередь, будет вращать вал двигателя. Это вращение произойдет из-за ранее обсуждавшегося магнитного явления, когда разные магнитные полюса притягиваются друг к другу, а одинаковые полюса отталкиваются. Если вы постепенно меняете полярность полюсов статора таким образом, что их объединенное магнитное поле вращается, то ротор будет следовать и вращаться вместе с магнитным полем статора.
Он состоит из группы отдельных электромагнитов, расположенных таким образом, что они образуют полый цилиндр, причем один полюс каждого магнита обращен к центру группы. Термин «статор» происходит от слова «стационарный». Тогда статор является неподвижной частью двигателя. Ротор представляет собой вращающийся электрический компонент. Он также состоит из группы электромагнитов, расположенных вокруг цилиндра, полюса которых обращены к полюсам статора. Ротор расположен внутри статора и закреплен на валу двигателя. Термин «ротор» происходит от слова вращающийся. Таким образом, ротор является вращающейся частью двигателя. Задача этих компонентов двигателя — заставить вращаться ротор, который, в свою очередь, будет вращать вал двигателя. Это вращение произойдет из-за ранее обсуждавшегося магнитного явления, когда разные магнитные полюса притягиваются друг к другу, а одинаковые полюса отталкиваются. Если вы постепенно меняете полярность полюсов статора таким образом, что их объединенное магнитное поле вращается, то ротор будет следовать и вращаться вместе с магнитным полем статора.
Как показано на рис. 9, статор имеет шесть магнитных полюсов, а ротор — два полюса. В момент времени 1 полюса статора A-1 и C-2 являются северными полюсами, а противоположные полюса, A-2 и C-1, являются южными полюсами. S-полюс ротора притягивается двумя N-полюсами статора, а два южных полюса статора притягиваются к N-полюсу ротора. Во время 2 полярность полюсов статора меняется так, что теперь полюса C-2, B-1 и N, а C-1 и B-2 являются полюсами S. Затем ротор вынужден повернуться на 60 градусов, чтобы выровняться с полюсами статора, как показано на рисунке. В момент 3 B-1 и A-2 равны N. В момент 4 A-2 и C-1 равны N. При каждом изменении противоположные полюса статора притягиваются к полюсам ротора. Таким образом, когда магнитное поле статора вращается, ротор вынужден вращаться вместе с ним.
Одним из способов создания вращающегося магнитного поля в статоре двигателя переменного тока является использование трехфазного источника питания для катушек статора.
На рис. 12 показано, как создается вращающееся магнитное поле. В момент времени 1 ток в полюсах фазы «A» положительный, а в полюсе A-1 — N. Ток в полюсах фазы «C» отрицательный, что делает C-2 полюсом N, а C-1 — S. В фазе «В» ток отсутствует, поэтому эти полюса не намагничены.
До сих пор мало что было сказано о роторе. В предыдущих примерах предполагалось, что полюса ротора были намотаны катушками, как и полюса статора, и питались постоянным током для создания полюсов с фиксированной полярностью. Кстати, именно так работает синхронный двигатель переменного тока. Однако большинство двигателей переменного тока, используемых сегодня, не являются синхронными двигателями. Вместо этого так называемые «асинхронные» двигатели являются рабочими лошадками промышленности. Так чем же отличается асинхронный двигатель? Большая разница заключается в том, как ток подается на ротор. Это не внешний источник питания.

Электродвигатели переменного тока доступны в 3 типах; 3-фазный IEC, однофазный NEMA и трехфазный NEMA. Эти двигатели переменного тока имеют мощность от одной восьмой до 750 л.с. Диапазон напряжений от 115 до 575. Прежде чем сделать окончательный выбор, проконсультируйтесь со специалистом по применению двигателей. Правильный выбор двигателя может сэкономить энергию и со временем снизить затраты на эксплуатацию вашей системы.
Основы выбора двигателя: Типы двигателей переменного/постоянного тока
Какой тип электродвигателя выбрать для конвейера, стола XYZ или робота? Прежде чем выбрать один, вы должны понять характеристики каждого типа двигателя на рынке.
Типы электродвигателей
Существует два очевидных типа электродвигателей в зависимости от входного напряжения: переменного тока (переменного тока) или постоянного тока (постоянного тока).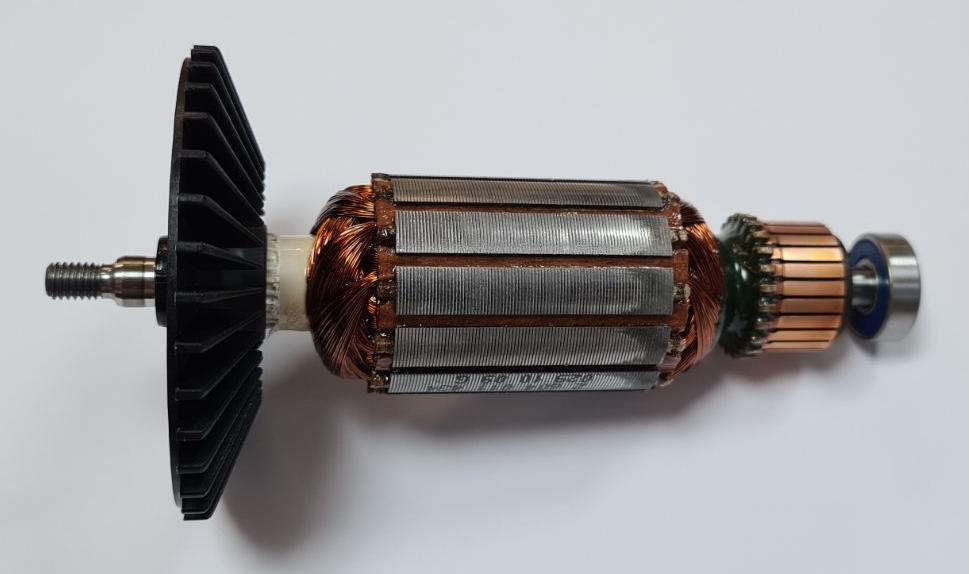
В то время как двигатели переменного тока используют переменный ток для питания ряда намотанных катушек, двигатели постоянного тока используют постоянный ток для питания угольных щеток или электрической коммутации. Двигатели постоянного тока, как правило, более эффективны и компактны, чем двигатели переменного тока.
Важно понимать не только различия между характеристиками двигателей переменного и постоянного тока, но и конкретные типы внутри этих категорий.
Помните, что некоторые производители могут предлагать как двигатели, так и приводы. Даже если двигатель постоянного тока, его драйвер может содержать внутренний источник питания, поэтому драйверы с входом переменного тока могут легко управлять двигателями постоянного тока с источником питания переменного тока.
Теперь давайте углубимся в двигатели переменного и постоянного тока.
| Двигатели переменного тока |
Двигатели переменного тока можно разделить на четыре основные категории: с расщепленными полюсами, с расщепленной фазой, с пусковым конденсатором, с пусковым конденсатором/рабочим конденсатором и с постоянным разделенным конденсатором.
Поскольку компания Oriental Motor производит только двигатели переменного тока с постоянными конденсаторами и разделенными конденсаторами, мы рассмотрим только двигатели PSC.
Каждый тип двигателя PSC аналогичен по конструкции. В статоре имеются обмотки, а для вращения используется короткозамкнутый ротор. Конденсаторы необходимы для однофазных двигателей для создания многофазного источника питания. Эти двигатели очень просты в управлении и не требуют драйвера или контроллера для работы. Незначительные различия изменяют характеристики базового асинхронного двигателя переменного тока для удовлетворения различных потребностей в производительности, таких как различные типы тормозов.
Различные типы двигателей переменного тока “PSC”
|
Асинхронные двигатели / асинхронные двигатели
Асинхронные двигатели являются наиболее распространенными и рассчитаны на непрерывную работу. Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
Они считаются «асинхронными» двигателями из-за наличия запаздывания или скольжения между вращающимся магнитным полем, создаваемым статором и его ротором. Причина, по которой их называют «асинхронными» двигателями, заключается в том, что они работают, индуцируя ток на роторе. Поскольку кроме шарикоподшипников трения нет, они обеспечивают обгон примерно на 30 оборотов после отключения питания (до включения передачи).
На приведенном ниже рисунке показаны конструкция и конструкция асинхронного двигателя.
① Фланцевый кронштейн |
 Металл, используемый в валу, – S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке.
Металл, используемый в валу, – S45C. Тип круглого вала имеет плоский вал (выходная мощность 25 Вт 1/30 л.с. или более), а тип вала-шестерни подвергается прецизионной чистовой обработке. Как они работают
Когда двигатель включен, он создает вращающееся магнитное поле в статоре. На ротор индуцируется ток, и магнитное поле, создаваемое индуцированным током, взаимодействует с вращающимся магнитным полем, создавая вращение.
В этой записи блога можно найти дополнительную информацию об асинхронных двигателях переменного тока.
Асинхронные двигатели надежны и могут использоваться для различных приложений общего назначения, где необходима непрерывная работа, а точность остановки не имеет решающего значения. Однофазные двигатели предлагаются для требований с фиксированной скоростью . Требования к переменной скорости могут быть удовлетворены путем объединения трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
Однофазные двигатели предлагаются для требований с фиксированной скоростью . Требования к переменной скорости могут быть удовлетворены путем объединения трехфазного асинхронного двигателя с ЧРП (преобразователь частоты) или однофазного двигателя с контроллером TRIAC. Некоторые производители также предлагают водонепроницаемые и пыленепроницаемые двигатели, заключая асинхронный двигатель в герметичный корпус.
Кривая скорость-момент отображает ожидаемую мощность двигателя Производительность двигателя представлена на графике кривой скорости-крутящего момента. Асинхронный двигатель переменного тока запустится с нулевой скорости при крутящем моменте «Ts», затем постепенно увеличит свою скорость за пределами нестабильной области и установится на «P» в стабильной области, где нагрузка и крутящий момент уравновешены. Любые изменения его нагрузки приведут к смещению положения «P» по кривой, и двигатель остановится, если он будет работать в нестабильной области. |
 Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Каждый двигатель имеет свою собственную кривую крутящего момента скорости и спецификацию «номинального крутящего момента».
Реверсивные двигатели
Реверсивные двигатели по определению могут работать в обратном направлении и идеально подходят для операций пуска/останова. Реверсивный двигатель похож на асинхронный двигатель, но с фрикционным тормозом и более сбалансированными обмотками. Благодаря фрикционному тормозному механизму его обгон уменьшается примерно до 6 оборотов после отключения питания (до включения передачи). Обмотка двигателя также более сбалансирована, чтобы увеличить пусковой момент для работы в режиме пуска/останова.
Из-за дополнительного тепла, выделяемого реверсивными двигателями, их рекомендуемый рабочий цикл составляет всего 30 минут или 50 %. Примером применения реверсивного двигателя является делительный конвейер, который не слишком требователен к пропускной способности или точности остановки.
В задней части реверсивного двигателя установлен фрикционный тормозной механизм. Спиральная пружина оказывает постоянное давление, чтобы позволить тормозной колодке скользить к тормозному диску. Тормозное усилие, создаваемое тормозным механизмом реверсивного двигателя Oriental Motor, составляет примерно 10% выходного крутящего момента двигателя. | |
| На графике показана разница между кривыми скорость-момент асинхронного двигателя и реверсивного двигателя. |
Двигатели с электромагнитным тормозом
Двигатели с электромагнитным тормозом сочетают в себе трехфазный асинхронный двигатель или однофазный реверсивный двигатель со встроенным электромагнитным тормозом, активируемым при отключении питания. По сравнению с реверсивными двигателями, эти двигатели обеспечивают перебег всего 2-3 оборота (до передачи) и могут использоваться до 50 раз в минуту. Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Эти двигатели предназначены для удержания их номинальной нагрузки во время вертикальной работы или просто для фиксации двигателя на месте при отключении питания.
Тормозной механизм внутри двигателя с электромагнитным тормозом более совершенен, чем реверсивный двигатель. Вместо тормозной колодки и винтовой пружины, которая постоянно оказывает давление, электромагнитный тормоз включается и выключается электромагнитным и пружинным механизмом.
Как они работают
Как показано на изображении выше, когда на катушку магнита подается напряжение, якорь притягивается к электромагниту против силы пружины, тем самым отпуская тормоз и позволяя валу двигателя свободно вращаться. Когда напряжение не подается, пружина прижимает якорь к тормозной ступице и удерживает вал двигателя на месте, тем самым приводя в действие тормоз.
Двигатели с электромагнитным тормозом используются в вертикальных приложениях, где необходимо удерживать груз, или в приложениях, где груз должен быть заблокирован в положении при отключении питания.
Моментные двигатели
Моментные двигатели предназначены для обеспечения высокого пускового крутящего момента и характеристик наклона (крутящий момент максимален при нулевой скорости и постоянно уменьшается с увеличением скорости), а также для работы в широком диапазоне скоростей. Благодаря своей способности изменять выходной крутящий момент в зависимости от входного напряжения, они обеспечивают стабильную работу при заблокированном роторе или в условиях остановки, например, при намотке/натяжении.
Простая регулировка крутящего момента для натяжения |
Синхронные двигатели
Синхронные двигатели называются «синхронными», поскольку они используют специальный ротор для синхронизации своей скорости с частотой входной мощности. Для 4-полюсного синхронного двигателя, работающего на частоте 60 Гц, он будет вращаться со скоростью 1800 об/мин («синхронная скорость»). Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Моим самым ранним воспоминанием о применении синхронного двигателя было то, что кто-то использовал его для привода стрелок башенных часов.
Другой тип синхронного двигателя, называемый низкоскоростным синхронным двигателем, обеспечивает высокоточное регулирование скорости, низкоскоростное вращение и быстрое двунаправленное вращение. В этих двигателях в роторе используются постоянные магниты, поэтому они очень отзывчивы. Однако они увеличивают количество полюсов, поэтому синхронная скорость снижается до 72 об/мин при 60 Гц. Низкоскоростные синхронные двигатели могут останавливаться в течение 0,025 секунды при частоте 60 Гц, если они работают в пределах допустимой инерции нагрузки.
Базовая конструкция низкоскоростных синхронных двигателей такая же, как у шаговых двигателей. Поскольку они могут приводиться в действие от источника переменного тока и обладают превосходными пусковыми и остановочными характеристиками, их иногда называют «шаговыми двигателями переменного тока».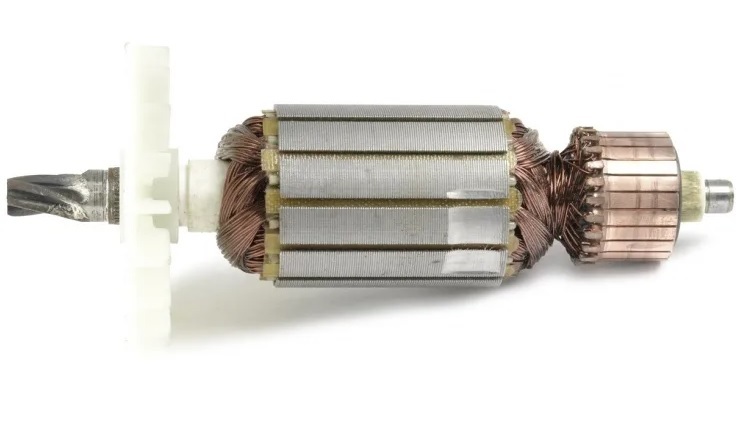
| Двигатели постоянного тока |
Двигатели постоянного тока используют постоянный ток для питания угольных щеток и коллектора или для электрической коммутации обмоток с драйвером. Двигатели постоянного тока примерно на 30% эффективнее двигателей переменного тока, поскольку им не нужно индуцировать ток для создания магнитных полей. Вместо этого в роторе используются постоянные магниты.
Электродвигатели постоянного тока бывают двух основных типов: щеточные и бесщеточные. В то время как щеточные двигатели предназначены для приложений общего назначения, бесщеточные двигатели предназначены для точных приложений.
Различные типы двигателей постоянного тока
|
Коллекторные двигатели
Источник: Linear Motion Tips/Design World
Щетки и коллектор внутри щеточного двигателя механически коммутируют обмотки двигателя, и он продолжает вращаться до тех пор, пока к нему подключен источник питания. Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели просты в управлении, но требуют периодического обслуживания и замены щеток, поэтому их расчетный срок службы составляет 1000–1500 часов (более или менее в зависимости от условий эксплуатации). Хотя они считаются более эффективными, чем двигатели переменного тока, они теряют эффективность из-за начального сопротивления обмотки, трения щеток и потерь на вихревые токи.
Коллекторные двигатели предлагаются нескольких типов: щеточные двигатели с постоянными магнитами, шунтирующие, последовательные и составные. Типичное применение щеточного двигателя включает радиоуправляемые автомобили и дворники.
Поскольку Oriental Motor не производит щеточные двигатели, мы предлагаем ограниченную информацию о щеточных двигателях.
Бесщеточные двигатели
Системы бесщеточных двигателей обеспечивают лучшую производительность, чем щеточные двигатели, благодаря электрической коммутации и замкнутой обратной связи, но требуют, чтобы драйверы электрически коммутировали обмотки двигателя. Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Это увеличивает общую стоимость на ось, но может быть необходимой стоимостью для приложений, требующих более продвинутых функций управления скоростью или функций с обратной связью, таких как конвейеры непрерывного действия.
Как они работают
Бесщеточный двигатель имеет встроенный магнитный элемент или оптический энкодер для определения положения ротора. Датчики положения посылают сигналы в схему привода. В бесщеточном двигателе используются трехфазные обмотки
, соединенные по схеме «звезда». В роторе используется радиально-сегментированный постоянный магнит.
ИС на эффекте Холла используется для магнитного элемента датчика. Внутри статора размещены три микросхемы на эффекте Холла, которые посылают цифровые сигналы при вращении двигателя. Эти сигналы сообщают водителю, с какой скоростью работает двигатель и когда нужно подать питание на следующий набор обмоток точно в нужное время.
Узнайте больше о различиях между щеточными и бесщеточными двигателями
Бесщеточные двигатели и приводные системы часто сравнивают с двигателями переменного тока и системами с частотно-регулируемым приводом. Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Вот сравнение между двигателем переменного тока мощностью 200 Вт и частотно-регулируемым приводом и бесщеточным двигателем и драйвером серии BLE2.
Мы также показываем кривую скорости и крутящего момента системы бесщеточного двигателя по сравнению с двигателем переменного тока и системой ЧРП с эквивалентным типоразмером.
| Бесколлекторный двигатель + драйвер | Двигатель переменного тока + ЧРП |
По сравнению с щеточными двигателями и двигателями переменного тока бесщеточные двигатели имеют ряд преимуществ, которые могут улучшить работу или уменьшить размеры для таких приложений, как конвейеры и мобильные роботы.
Бесколлекторные двигатели Oriental Motor комплектуются собственными драйверами для обеспечения гарантированных технических характеристик и быстрой настройки. Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Различные варианты зубчатой передачи предлагаются для гибкости. Замкнутая обратная связь обеспечивается либо энкодером, либо датчиками Холла, и каждый драйвер предлагает различные характеристики и функции для различных приложений.
Преимущество бесщеточного двигателя (по сравнению с двигателями переменного тока)
| Преимущества по сравнению с щеточными двигателями | Преимуществапо сравнению с двигателями переменного тока |
|
|
Шаговые двигатели
С технической точки зрения бесщеточные двигатели также включают шаговые двигатели и серводвигатели, которые предназначены для приложений позиционирования благодаря их превосходной способности останавливаться в точных местах. Одной вещью, которая отличает шаговые двигатели от бесщеточных двигателей или серводвигателей, является их способность работать без обратной связи.
Одной вещью, которая отличает шаговые двигатели от бесщеточных двигателей или серводвигателей, является их способность работать без обратной связи.
| Зубчатый ротор и статор с постоянным магнитом | Двухфазный метод возбуждения (упрощенная схема) |
Точность остановки шагового двигателя обеспечивается зубчатым намагниченным ротором и зубчатым электромагнитным статором. Другими словами, вместо 4 полюсов в приведенном выше примере бесщеточного двигателя стандартный шаговый двигатель 1,8° имеет 50 полюсов с 50 зубьями.
Благодаря конструкции ротора и статора шаговый двигатель перемещается на четверть шага зуба за каждый прямоугольный импульс, получаемый его драйвером, а скорость регулируется входной частотой импульсов, поэтому очень легко контролировать пройденное расстояние и скорость. с помощью шагового двигателя. Шаговый двигатель также создает удерживающий момент в состоянии покоя, что важно для поддержания точности позиционирования.
Шаговых двигателей с разомкнутым контуром может быть достаточно для обычных приложений с повторяющимся позиционированием. Тем не менее, шаговые двигатели с обратной связью доступны для расширенных приложений позиционирования, требующих как точности, так и проверки положения.
Характеристики скорости и крутящего момента шагового двигателя | Кривая крутящего момента шагового двигателя обычно имеет нисходящий наклон; с самым высоким крутящим моментом, возникающим на низкой скорости, что означает, что его можно использовать для ускорения и замедления. В отличие от системы бесщеточного двигателя, шаговый двигатель не имеет области с ограниченным режимом работы. |
Если вы хотите узнать больше, я написал отдельные заметки о шаговых двигателях.
Подробнее о различиях между гибридными шаговыми двигателями, двигателями с постоянными магнитами и шаговыми двигателями с регулируемой скоростью
Узнайте больше о различиях между серводвигателями и шаговыми двигателями
Совет по выбору двигателя. |
|
В этом сообщении блога представлено общее представление о многих типах двигателей переменного/постоянного тока, представленных на рынке. В дополнение к различиям в производительности решающими факторами также могут быть качество, стоимость, ассортимент продукции, время выполнения заказа и поддержка.