9.2 Правила выполнения кинематических схем
Корпусные части составляющей единицы (машины или механизма) не показывают совсем или наносят их контур сплошными тонкими линиями. Пространственные кинематические механизмы изображают обычно в виде развёрнутых схем в ортогональных проекциях. Их получают путём размещения всех осей в одной плоскости. Такие схемы позволяют прояснить последовательность передачи движения, но не показывают действительного расположения деталей механизма. Кинематические схемы допускается выполнять в аксонометрии.
Все детали (звенья)
на кинематических схемах изображают
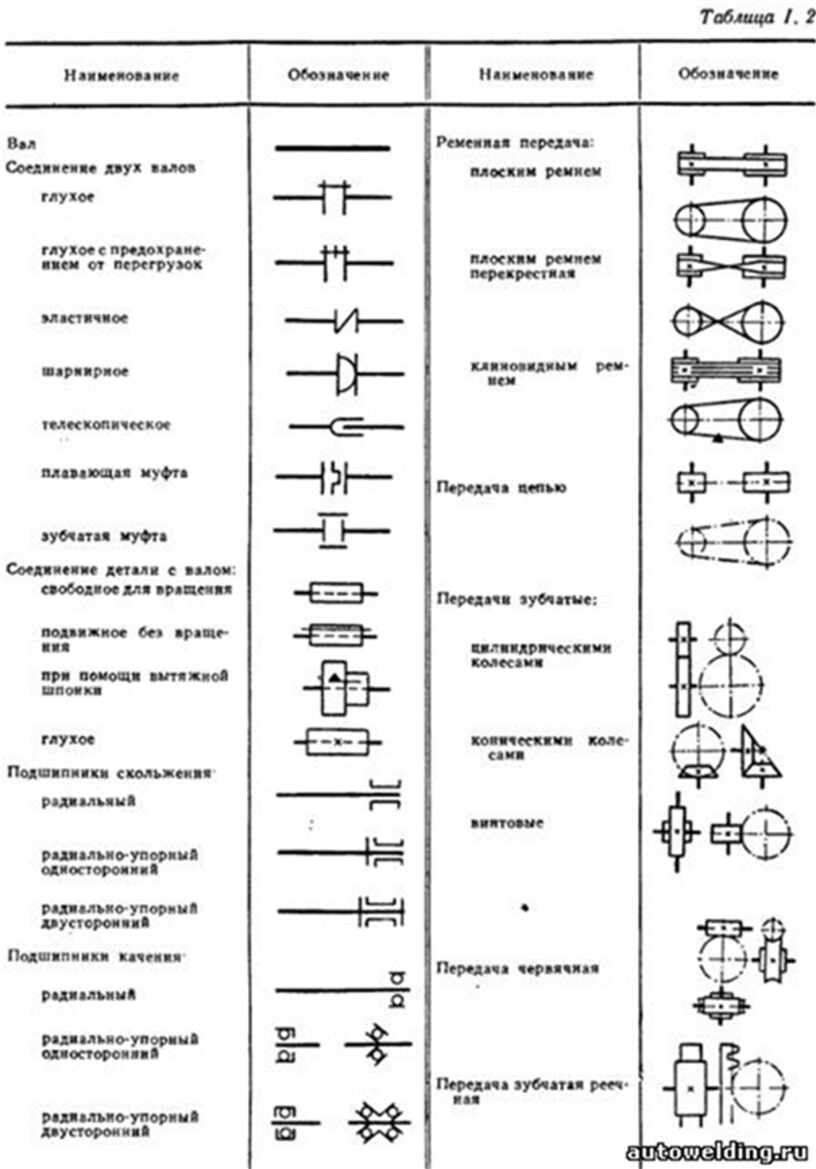
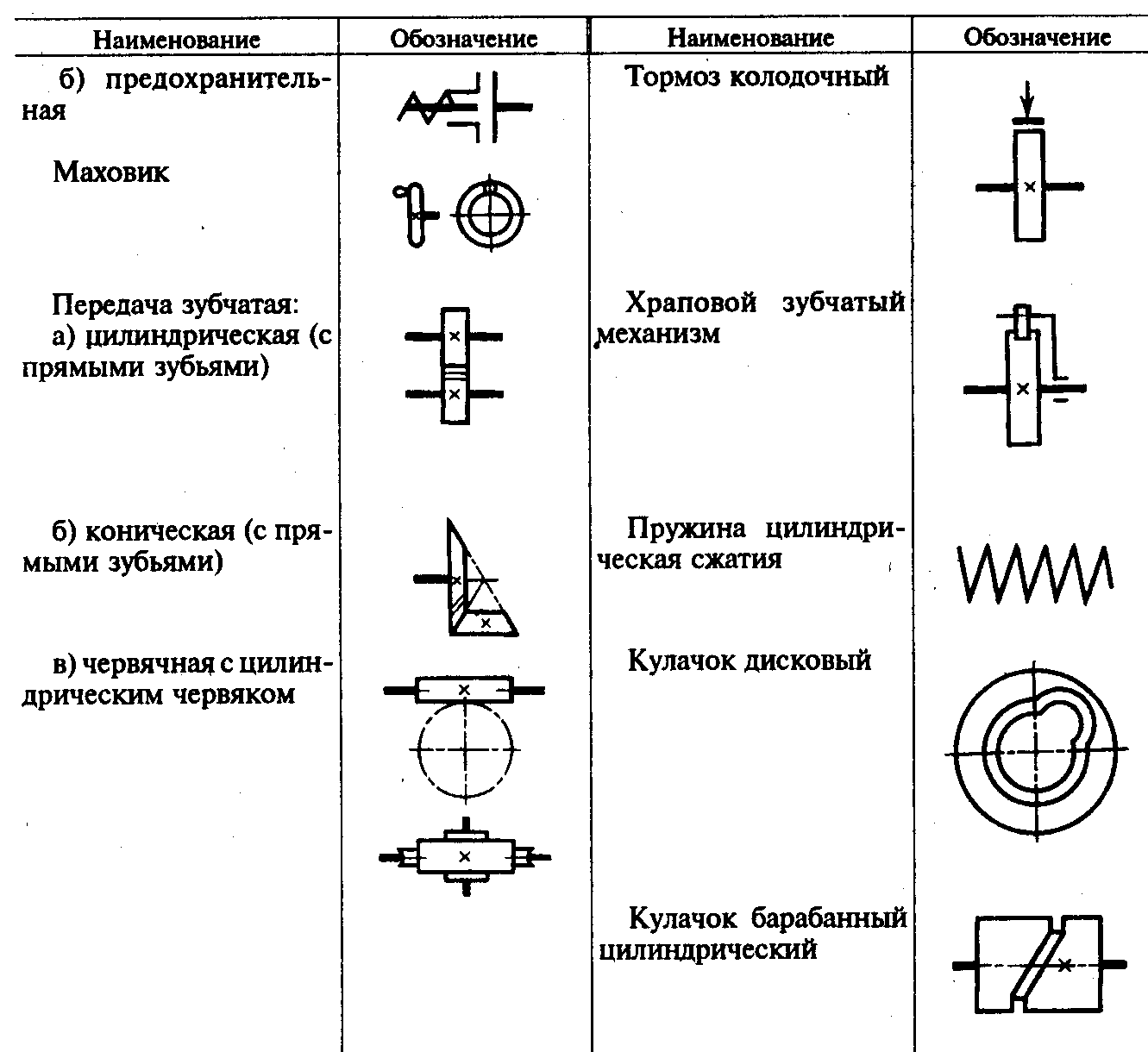
условно в виде графических символов,
которые лишь раскрывают принцип их
работы. Соединения смежных звеньев,
которое допускает их относительное
движение, называют кинематической
парой. Наиболее распространённые
кинематические пары: шарнир,
ползун и направляющая, винт
и гайка, шаровой шарнир.
Допускается использовать нестандартные
условные графические обозначения, но
с соответствующими пояснениями на
схеме.
Кроме условных
графических обозначений, на кинематических
схемах дают указания у виде надписей,
поясняющих изображённый элемент.
Например, указывают тип и характеристику
двигателя, диаметры шкивов, модуль и
число зубьев зубчатых колёс и др. Взаимное
расположение звеньев на кинематической
схеме должно соответствовать начальному,
среднему или рабочему положению
исполнительных органов механизма или
машины. Если звено при работе изделия
меняет своё положение, то на схеме
допускается указывать её крайние
положения тонкими штрихпунктирными
линиями. На кинематической схеме звеньям
присваивают номера в порядке передачи
движения, начиная от двигателя. Валы
номеруют римскими цифрами, остальные
элементы — арабскими. Порядковый
номер элемента проставляют на полочке
выносной линии. Под полочкой указывают
основные характеристики и параметры
кинематического звена.
На кинематических схемах валы, оси, стержни изображают сплошными основными линиями; зубчатые колёса, червяки, звёздочки, шкивы, кулачки — сплошными тонкими линиями.
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
ГОСТ 2.770-68 (2000) ЕСКД. Обозначения условные графические на схемах. Элементы кинематики.
ГОСТ 2.703-68. ЕСКД. Правила выполнения кинематических схем.
ISO 3952 Kinematic diagrams — Graphical symbols.
В соответствии
с ГОСТ 2. Код схемы должен состоять из буквенной части, определяющей вид схемы, и цифровой части, определяющей тип схемы (таблица 16). Таблица 16 – Виды и типы схем
Например, схема
электрическая принципиальная – ЭЗ;
схема гидравлическая соединений – Г4;
схема деления структурная – E1; схема
электрогидравлическая принципиальная
– СЗ; схема электрическая соединений
и подключения – ЭО; схема гидравлическая
структурная, принципиальная и соединений
– ГО. Структурные схемы определяют основные функциональные части изделия или процесса, их назначение и взаимосвязи. Этот тип схем применяется наиболее часто, он объединяет схемы, отражающие состав изделий; блок-схемы, определяющие алгоритмы обработки информации; организационно-управленческие схемы и т. п. Функциональные схемы содержат информацию о процессах, протекающих в объектах. Такие схемы позволяют анализировать возможности вновь разрабатываемых объектов, обосновывать проведение отладки и ремонта. Принципиальные схемы определяют полный состав элементов объекта и связей между ними, служат основанием для разработки комплекта конструкторской документации на объект. Схемы соединений отображают только связи между частями
объекта, осуществляемые с помощью
связующих элементов, с указанием их
геометрического положения относительно
частей объекта. Схемы подключений показывают внешние подключения объектов. Схемы расположения отображают геометрическое расположение элементов объектов относительно друг друга. Общие схемы составляются с целью наглядного представления информации о составе очень сложных объектов и видах связи между их частями. | |||||||||||||||||||||||||||||||||||||||||||||
 701-84 «Схемы. Виды и типы. Общие
требования к выполнению» схемы
классифицируются по назначению, а
также по типу элементов и связей между
ними. Наименование и код схем определяют
их видом и типом.
701-84 «Схемы. Виды и типы. Общие
требования к выполнению» схемы
классифицируются по назначению, а
также по типу элементов и связей между
ними. Наименование и код схем определяют
их видом и типом.
Принципиальная кинематическая схема | это… Что такое Принципиальная кинематическая схема?
Кинематическая схема револьверной головки токарного станкаПринципиальная кинематическая схема — это такая схема, на которой показана последовательность передачи движения от двигателя через передаточный механизм к рабочим органам машины (например, шпинделю станка, режущему инструменту, ведущим колёсам автомобиля и др.) и их взаимосвязь.
На кинематических схемах изображают только те элементы машины или механизма, которые принимают участие в передаче движения (зубчатые колёса, ходовые винты, валы, шкивы, муфты и др.
Содержание
|
Нормативные документы
Стандарты, регламентующие условные обозначения и выполнение кинематических схем:
- ГОСТ 2.770-68 (2000) ЕСКД. Обозначения условные графические на схемах. Элементы кинематики.
- ГОСТ 2.703-2011. ЕСКД. Правила выполнения кинематических схем.
- ISO 3952 Kinematic diagrams — Graphical symbols.
Правила выполнения кинематических схем
Корпусные части составляющей единицы (машины или механизма) не показывают совсем или наносят их контур сплошными тонкими линиями. Пространственные кинематические механизмы изображают обычно в виде развёрнутых схем в ортогональных проекциях. Их получают путём размещения всех осей в одной плоскости. Такие схемы позволяют прояснить последовательность передачи движения, но не показывают действительного расположения деталей механизма. Кинематические схемы допускается выполнять в аксонометрии.
Кинематические схемы допускается выполнять в аксонометрии.
Все детали (звенья) на кинематических схемах изображают условно в виде графических символов (ГОСТ 2.770-68 (2000)), которые лишь раскрывают принцип их работы. Соединения смежных звеньев, которое допускает их относительное движение, называют кинематической парой. Наиболее распространённые кинематические пары: шарнир, ползун и направляющая, винт и гайка, шаровой шарнир. Допускается использовать нестандартные условные графические обозначения, но с соответствующими пояснениями на схеме. На кинематической схеме разрешается изображать отдельные элементы схем других видов, которые непосредственно влияют на их работу (например, электрические или гидравлические).
Кроме условных графических обозначений, на кинематических схемах дают указания в виде надписей, поясняющих изображённый элемент. Например, указывают тип и характеристику двигателя, диаметры шкивов, модуль и число зубьев зубчатых колёс и др. Взаимное расположение звеньев на кинематической схеме должно соответствовать начальному, среднему или рабочему положению иполнительных органов механизма или машины.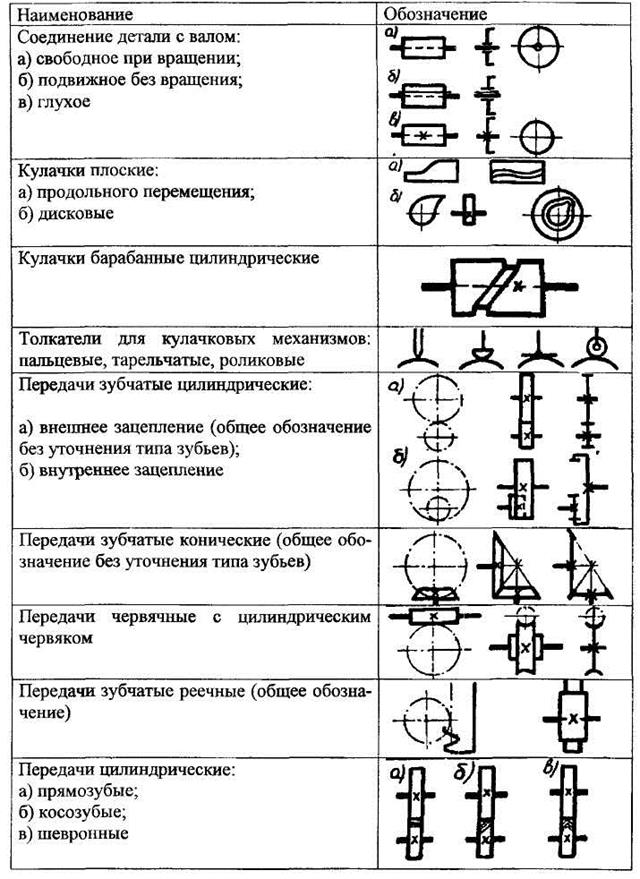 Если звено при работе изделия меняет своё положение, то на схеме допускается указывать её крайние положения тонкими штрихпунктирными линиями. На кинематической схеме звеньям присваивают номера в порядке передачи движения, начиная от двигателя. Валы номеруют римскими цифрами, остальные элементы — арабскими. Порядковый номер элемента проставляют на полочке выносной линии. Под полочкой указывают основные характеристики и параметры кинематического звена.
Если звено при работе изделия меняет своё положение, то на схеме допускается указывать её крайние положения тонкими штрихпунктирными линиями. На кинематической схеме звеньям присваивают номера в порядке передачи движения, начиная от двигателя. Валы номеруют римскими цифрами, остальные элементы — арабскими. Порядковый номер элемента проставляют на полочке выносной линии. Под полочкой указывают основные характеристики и параметры кинематического звена.
На кинематических схемах валы, оси, стержни изображают сплошными основными линиями; зубчатые колёса, червяки, звёздочки, шкивы, кулачки — сплошными тонкими линиями.
Чтение кинематических схем
Читать кинематическую схему начинают от двигателя, как источника движения всех подвижных деталей механизма. Определяя последовательно по условным обозначениям каждый элемент кинематической цепи, устанавливают его назначение и характер передачи движения.
PUMA-робот.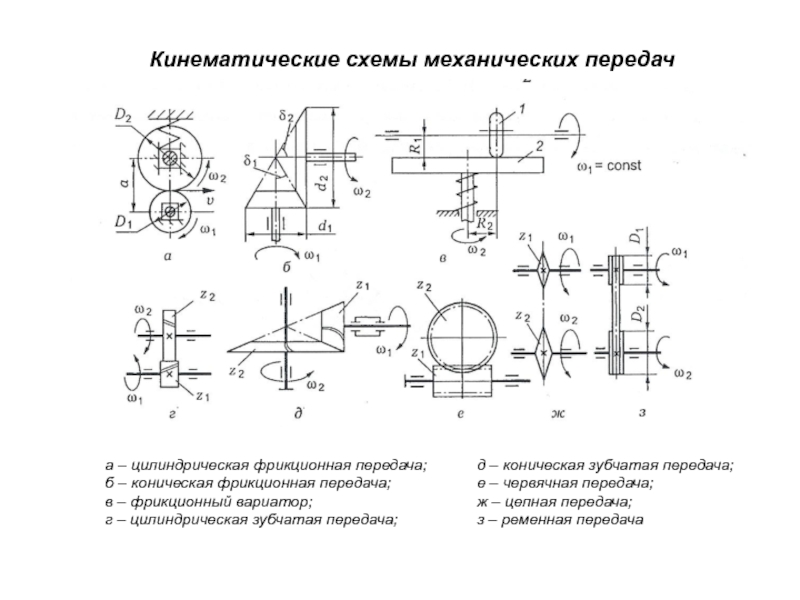 .. .. | … и его кинематическая модель |
Литература
- Артоболевский И. И. Теория машин и механизмов. М. Наука 1988.
См. также
- Схема изделия
- Механизм
- Машина
Reading Kinematics Graphs – Mini Physics
от Mini Physics
Показать/скрыть подтемы (скорость, скорость и ускорение | уровень O) Показать/скрыть подтемы (кинематика | уровень A)Графики расстояние-время
- Для графика расстояние-время расстояние никогда не уменьшается.
- Когда объект неподвижен, график расстояние-время будет горизонтальным.
- Градиент графика «расстояние-время» представляет собой мгновенную скорость объекта.
- Для прямой линии с положительным уклоном это означает, что объект движется с постоянной скоростью
- Нет прямой линии с отрицательным уклоном (поскольку расстояние никогда не уменьшается)
- Для кривых это означает, что объект движется с неравномерной скоростью
Графики смещения во времени
- Детали аналогичны графикам расстояние-время, за исключением того, что расстояние теперь равно перемещению, а скорость теперь равна скорости.

- Одно небольшое отличие: есть прямая линия с отрицательным уклоном, это означает, что объект движется с постоянной скоростью в противоположном направлении. 9{-1}$, где v — скорость объекта.
- Для прямой с положительным градиентом это означает, что объект ускоряется .
- Для прямой линии с отрицательным градиентом это означает, что объект замедляется .
- Для кривых это означает, что ускорение объекта меняется.
- Площадь под графиком — изменение смещения объекта.

Графики времени разгона
- Площадь под графиком представляет собой изменение скорости объекта
Сводка кинематических графиков
На рисунке ниже показаны графики перемещения-времени, скорости-времени и ускорения-времени для соответствующего состояния движения. Он служит кратким изложением вышеприведенного текста.
На приведенном ниже рисунке показано соотношение между графиком перемещения-времени, графиком скорости-времени и графиком ускорения-времени.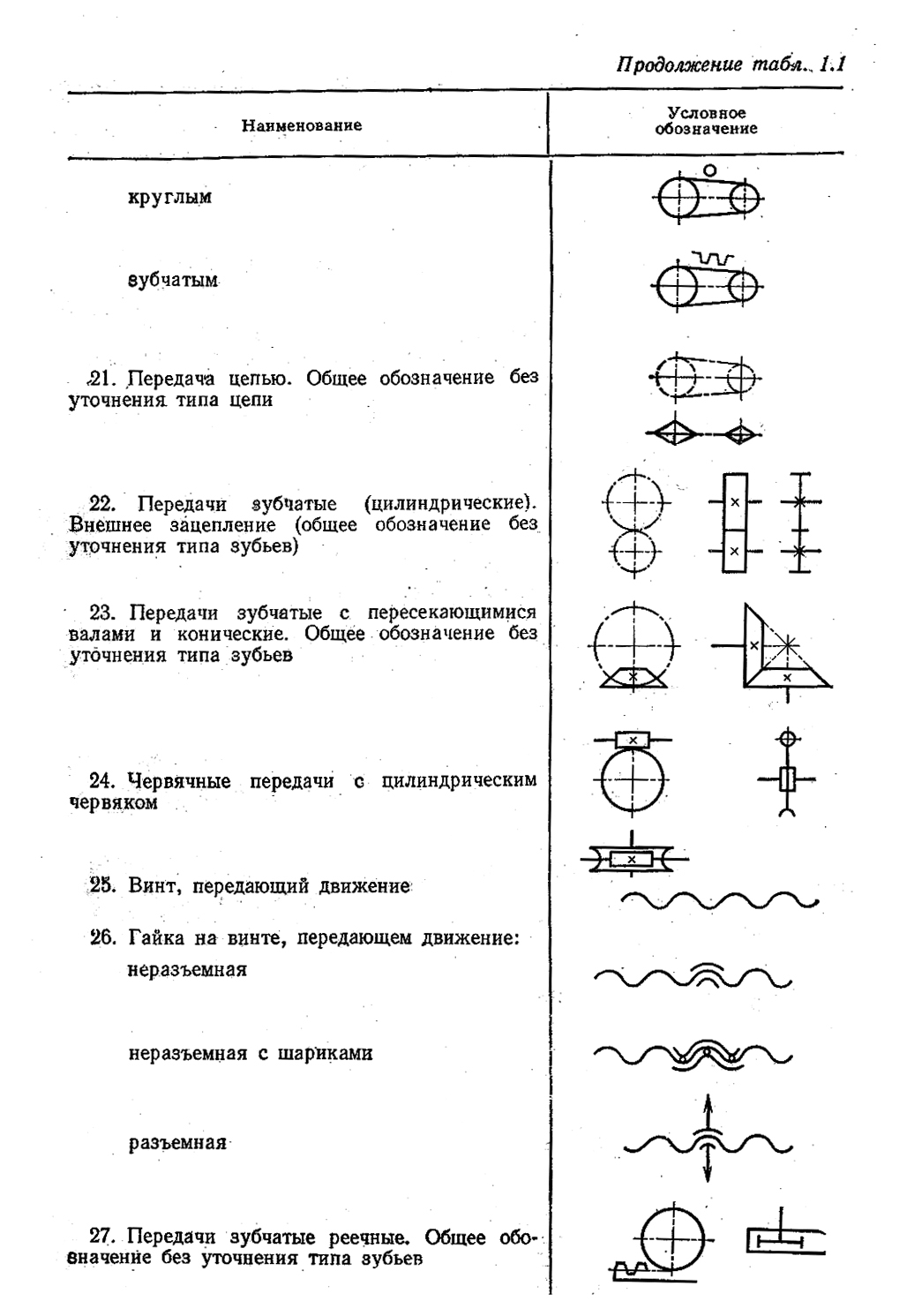
Вопросы для самопроверки
Можете ли вы определить по графику смещения во времени, неподвижен ли объект?
Показать/скрыть ответыДа. Если объект неподвижен, он будет отображаться в виде горизонтальной линии на графике смещения-времени.
Как можно получить среднюю скорость и мгновенную скорость из графика смещения во времени.
Показать/Скрыть ответыСреднюю скорость можно найти, используя $\frac{\text{общее перемещение}}{\text{общее время}}$.
Мгновенная скорость в момент времени может быть найдена по градиенту касательной к этому моменту времени.
Можете ли вы определить по графику скорость-время, неподвижен ли объект?
Показать/скрыть ответыДа. Если объект неподвижен, график зависимости скорости от времени будет представлять собой горизонтальную линию при $\text{v}=0$.
Как можно получить ускорение объекта из графика зависимости скорости от времени? Что представляет собой площадь под графиком зависимости скорости от времени?
Показать/скрыть ответы Ускорение объекта в момент времени можно получить из градиента касательной к этому моменту времени.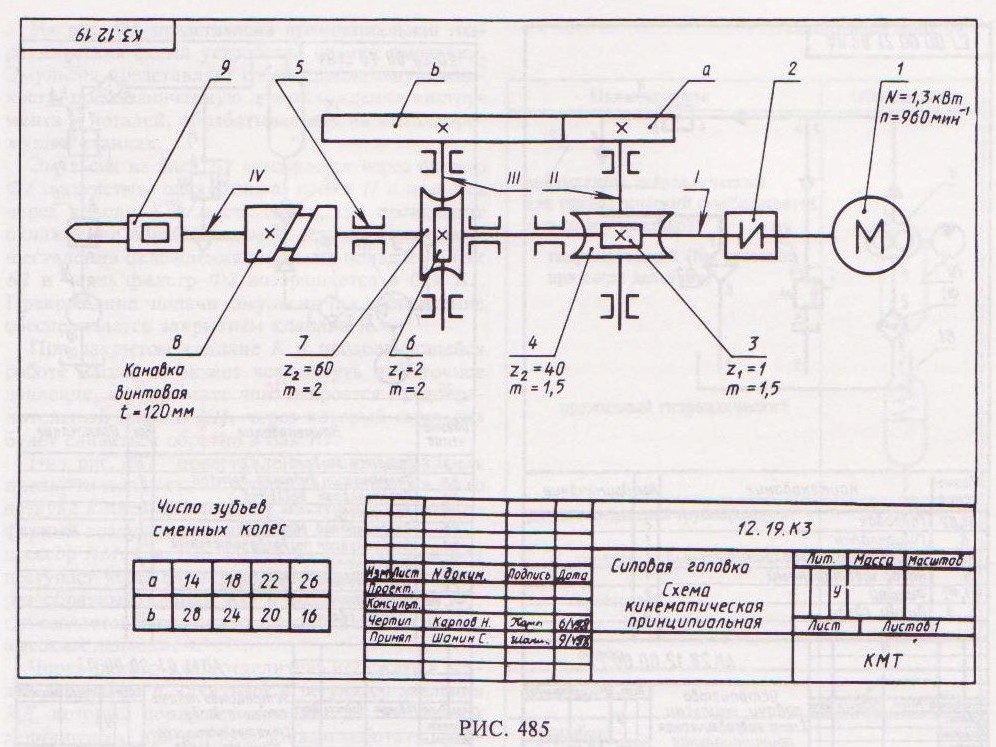
Площадь под графиком скорость-время представляет общее пройденное расстояние.
Можете ли вы определить по графику ускорение-время, неподвижен ли объект?
Показать/скрыть ответыНет, нельзя. Ты знаешь почему?
Совет: см. сводку диаграмм кинематики (см. выше).
Оставьте комментарий ниже, если не можете найти ответ.
Вернуться к кинематике (уровень A)
Вернуться к списку тем уровня A
Вернуться к списку тем кинематики (уровень O)
Вернуться к списку тем уровня O
Делиться значит заботиться:
Категории Уровень A, Кинематика (Уровень A), Уровень O, Скорость, Скорость и ускорение Теги Диплом американской средней школы, Уровень O
02. Рисование диаграмм движения в 1D
- Последнее обновление
- Сохранить как PDF
- Идентификатор страницы
- 582
- Пол Д’Алессандрис
- Общественный колледж Монро
- Рисование диаграмм движения (качественных)
- Определение положения по диаграмме движения
- Определение скорости по диаграмме движения
- Определение ускорения по диаграмме движения
Слова, используемые физиками для описания движения объектов, определены выше.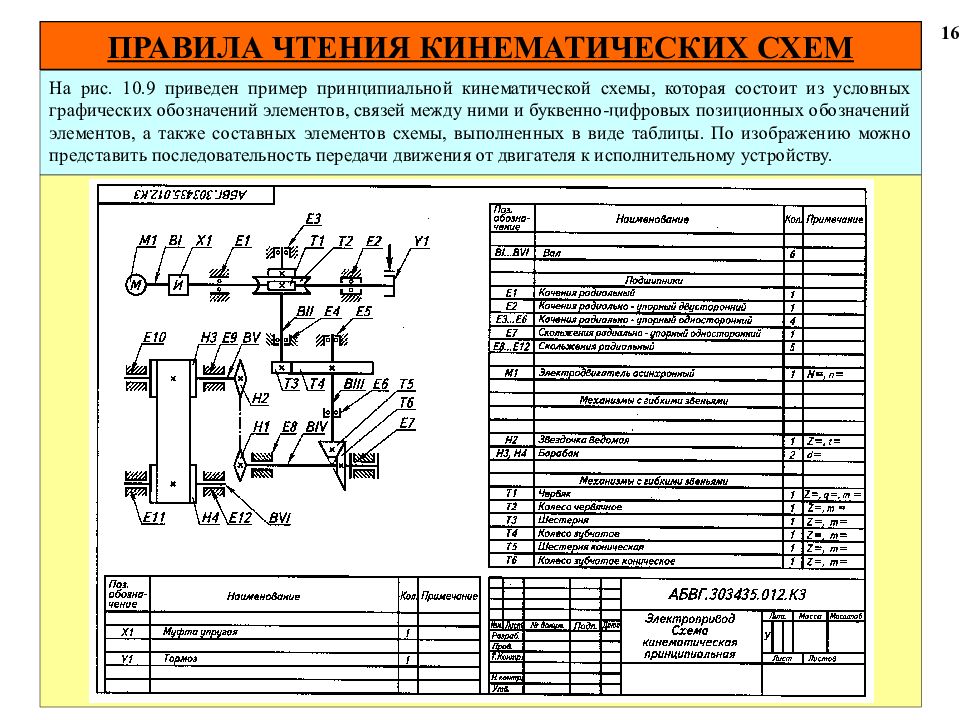 Однако научиться правильно использовать эти термины сложнее, чем просто запомнить определения. Чрезвычайно полезным инструментом для преодоления разрыва между обычным разговорным описанием ситуации и описанием физиков является диаграмма движения. Диаграмма движения — это первый шаг в переводе словесного описания явления в физическое описание.
Однако научиться правильно использовать эти термины сложнее, чем просто запомнить определения. Чрезвычайно полезным инструментом для преодоления разрыва между обычным разговорным описанием ситуации и описанием физиков является диаграмма движения. Диаграмма движения — это первый шаг в переводе словесного описания явления в физическое описание.
Начните со следующего словесного описания физической ситуации:
Водитель автомобиля, движущегося со скоростью 15 м/с, заметив красный сигнал светофора в 30 м впереди, тормозит свою машину, пока не остановится перед перекрестком.
Определение положения по диаграмме движения
Диаграмму движения можно рассматривать как фотографию физической ситуации с многократной экспозицией, при этом изображение объекта экспонируется на пленку через равные промежутки времени. (Возможно, вы видели фотографии такого типа, сделанные со стробоскопом.) Например, описанная выше фотография с многократной экспозицией выглядела бы примерно так:0007
Обратите внимание, что изображения автомобиля сближаются ближе к концу его движения, потому что автомобиль проходит меньшее расстояние между экспозициями с одинаковой синхронизацией.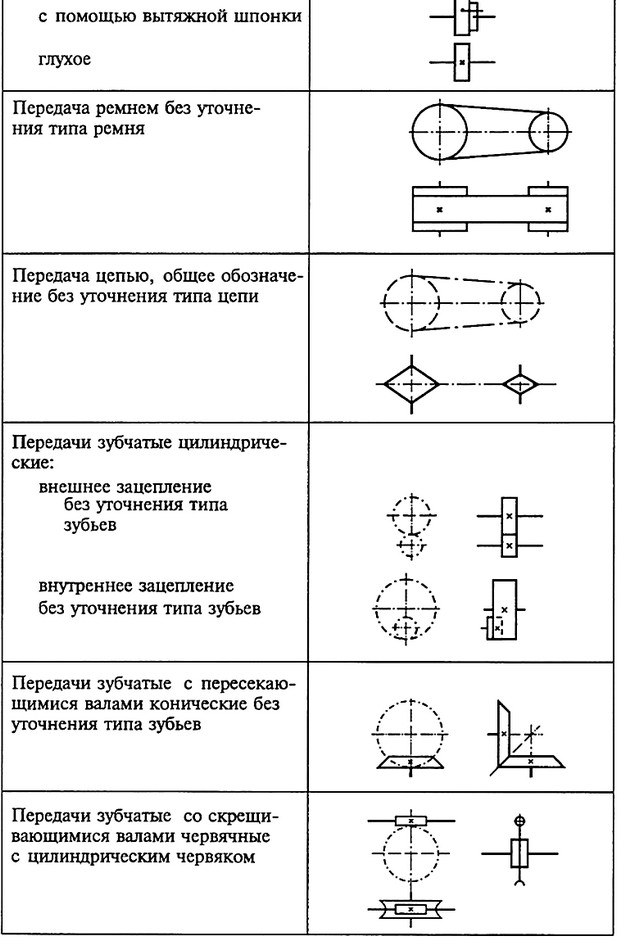
В целом, при рисовании диаграмм движения лучше представлять объект просто как точку, если фактическая форма объекта не передает какую-либо интересную информацию. Таким образом, лучшей диаграммой движения будет:
Поскольку цель диаграммы движения — помочь нам описать движение автомобиля, необходима система координат. Помните, что для определения системы координат необходимо выбрать ноль, задать положительное направление и выбрать масштаб. В этом курсе мы всегда будем использовать метры в качестве шкалы положения, поэтому вы должны выбрать только ноль и положительное направление. Помните, правильного ответа не существует. Любая система координат так же правильна, как и любая другая.
Вариант ниже указывает, что начальная позиция автомобиля является источником, а позиции справа от нее положительны.
Теперь мы можем описать положение автомобиля. Автомобиль начинает с нулевой позиции, а затем имеет положительные, увеличивающиеся позиции на протяжении оставшейся части своего движения.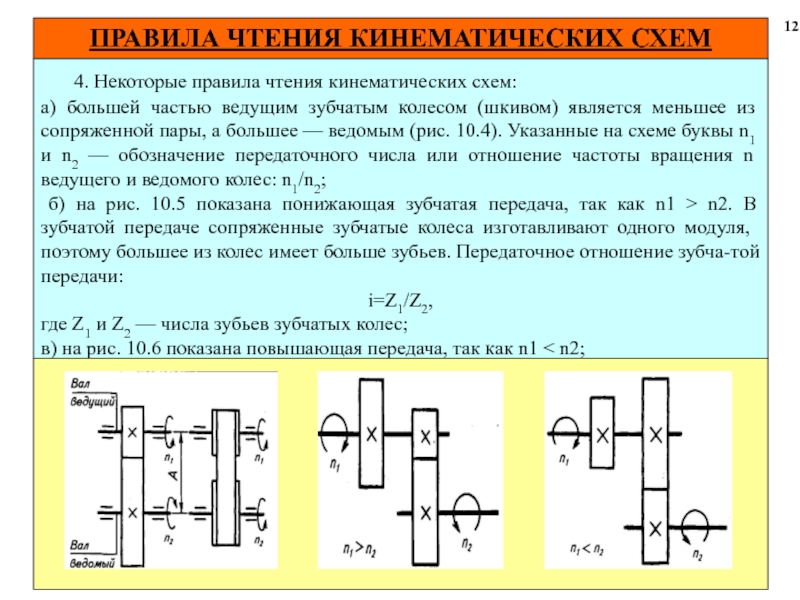
Определение скорости по диаграмме движения
Поскольку скорость — это изменение положения автомобиля в течение соответствующего интервала времени, и мы можем выбрать временной интервал в качестве временного интервала между экспозициями на нашей фотографии с многократной экспозицией, скорость — это просто изменение положения автомобиля «между точками». Таким образом, стрелки (векторы) на диаграмме движения ниже представляют скорость автомобиля.
Теперь мы можем описать скорость автомобиля. Поскольку векторы скорости всегда указывают в положительном направлении, скорость всегда положительна. Автомобиль стартует с большой положительной скоростью, которая постепенно снижается, пока скорость автомобиля не станет равной нулю в конце его движения.
Определение ускорения по диаграмме движения
Поскольку ускорение — это изменение скорости автомобиля в течение соответствующего интервала времени, и мы можем выбрать временной интервал в качестве временного интервала между экспозициями на нашей фотографии с многократной экспозицией, мы можем определить ускорение путем сравнения двух последовательных скоростей.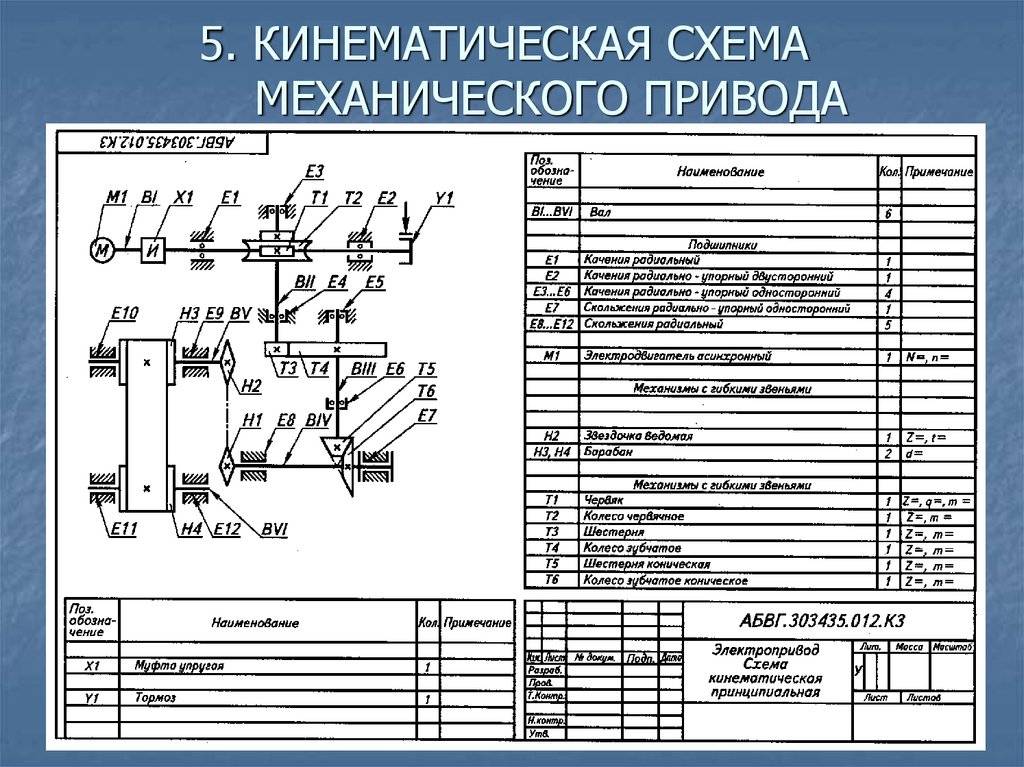 Изменение этих векторов скорости будет представлять собой ускорение.
Изменение этих векторов скорости будет представлять собой ускорение.
Чтобы определить ускорение,
- выберите два последовательных вектора скорости,
- нарисуйте их, начиная с одной и той же точки,
- постройте вектор (стрелку), соединяющий вершину первого вектора скорости с вершиной второго вектора скорости .
- Построенный вектор представляет собой ускорение.
Сравнение первого и второго векторов скорости приводит к ускорению вектор, показанный ниже:
Таким образом, ускорение направлено влево и поэтому отрицательно. Вы можете построить вектор ускорения в любой момент времени, но, надеюсь, вы видите, что до тех пор, пока векторы скорости продолжают указывать вправо и уменьшаются по величине, ускорение остается отрицательным.
Таким образом, с помощью диаграммы движения вы можете извлечь много информации о положении, скорости и ускорении объекта. Вы уже на пути к полному кинематическому описанию.