Как сделать простой регулятор оборотов, скорости вращения для компьютерного вентилятора, кулера. « ЭлектроХобби
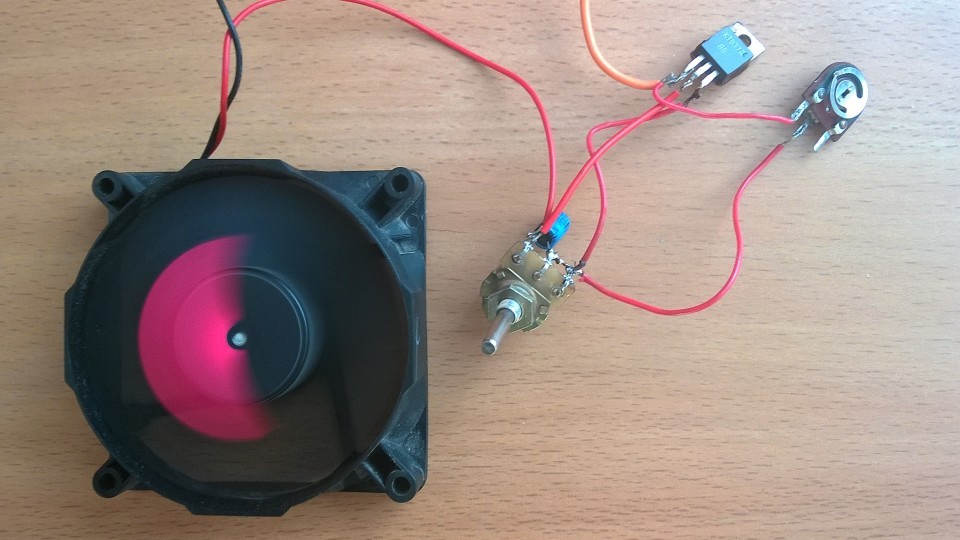
Компьютерные вентиляторы могут быть полезны не только внутри компьютера. Допустим я использую такой вентилятор (размерами 120 на 120 мм, 12 В и 350 мА) для быстрой разморозки своего мини холодильника, а также его вполне хватает для проветривания небольшого помещения, после того как надымил паяльником. Хотя когда такие вентиляторы питаешь от их стандартного напряжения 12 вольт они издают относительно большой шум. Да и не всегда нужны их максимальные обороты вращения. Порой данного кулера хватает и при пониженной мощности. Но чтобы это сделать нам понадобится весьма простая схема (что приведена ниже на рисунке), которая позволит регулировать частоту вращения, его скорость, обороты.
Для бывалых электронщиков и радиотехников эта простая схема ясна и понятна, так что буду пояснять ее работы, принцип действия для новичков. Одно дело когда собрал схему, включил, и пусть себе работает. Другое же дело, когда знаешь как она функционирует, и при желании можно ввести свои какие-нибудь изменения и дополнения к имеющейся схеме.
Другое же дело, когда знаешь как она функционирует, и при желании можно ввести свои какие-нибудь изменения и дополнения к имеющейся схеме.
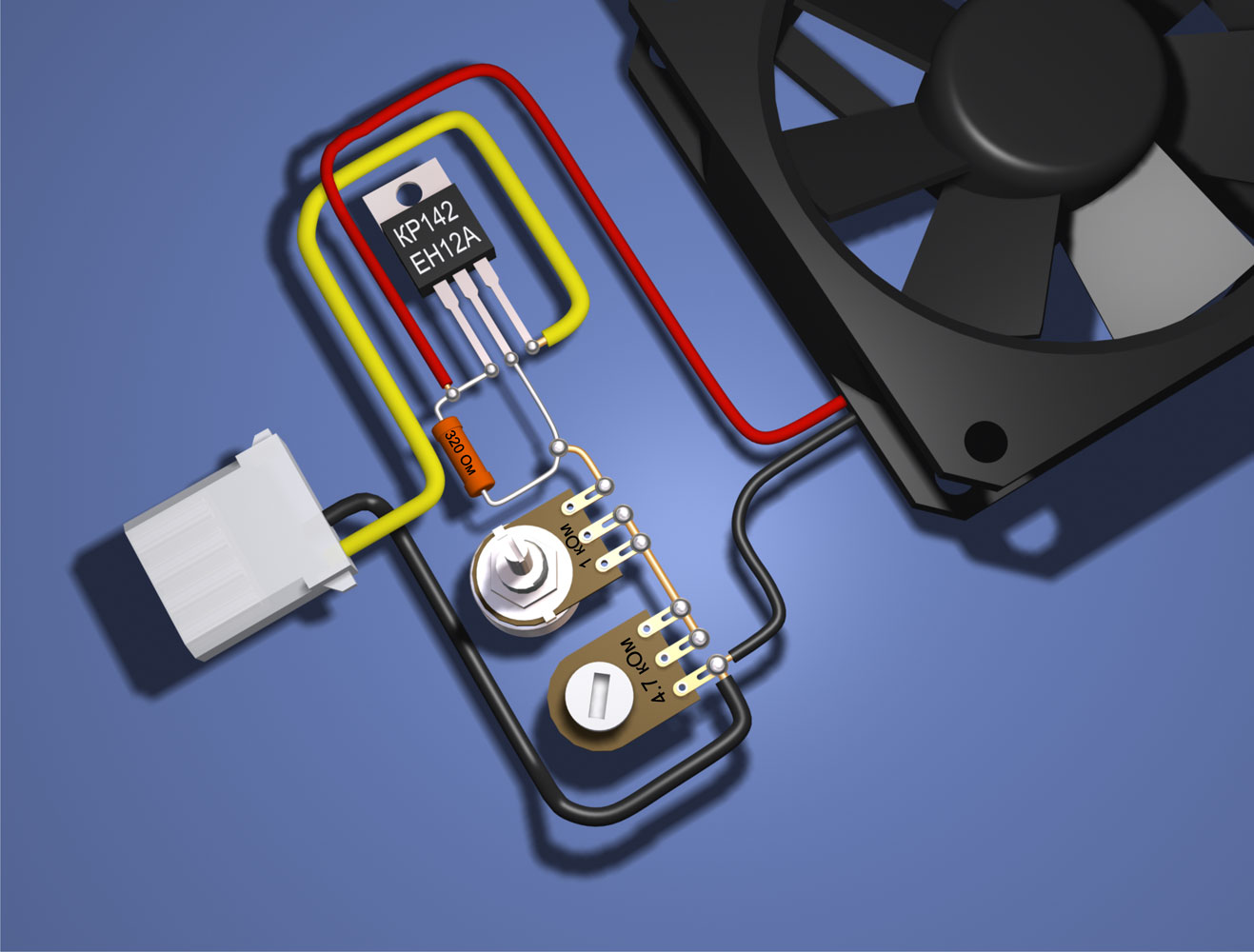
Итак, сама схема регулятора оборотов компьютерного вентилятора состоит всего из трех деталей, а именно это биполярный транзистор типа КТ817 с любым буквенным индексом, переменного резистора на 1 ком и постоянного резистора, который желательно подобрать наиболее подходящий. Транзистор включен по схеме с общим коллектором (называемым также эмиттерным повторителем), а это значит что он усиливает только ток, при том усиления по напряжению не происходит.
Между коллектором и эмиттером стоит делитель напряжения, состоящий из двух резисторов (переменного и постоянного). Как известно, биполярный транзистор имеет три вывода, это эмиттер, коллектор и база. Переход между базой и эмиттером считается управляющим, а переход между коллектором и эмиттером считается силовым. Так вот, в изначальном состоянии (когда никакого напряжения к схеме не приложено) переход коллектор-эмиттер закрыт, он через себя ток не пропускает, его проводимость в этом состоянии имеет бесконечно малое значение (проще говоря имеет бесконечно большое сопротивление). Но вот когда мы на управляющий переход подадим напряжение более 0,6 вольт, этот силовой переход (коллектор-эмиттер) постепенно начинает открываться. И чем больше мы пропустим тока через управляющий переход, тем больше тока сможет пройти через силовой переход.
Но вот когда мы на управляющий переход подадим напряжение более 0,6 вольт, этот силовой переход (коллектор-эмиттер) постепенно начинает открываться. И чем больше мы пропустим тока через управляющий переход, тем больше тока сможет пройти через силовой переход.
Именно от переменного резистора R1 зависит будет ли силовой переход закрыт (при этом вентилятор вращаться не будет) или же будет он полностью открыт (при этом кулер будет иметь максимальные обороты своего вращения). Естественно, чем больше мы выкрутим ручку переменного резистора, тем сильнее или медленнее будет вращаться наш компьютерный вентилятор (в зависимости в какую сторону мы будем вращать ручку). Но зачем нужен еще одни постоянные резистор R2 ? Дело в том что у переменного резистора имеется некоторая «мертвая зона», находясь в которой вращение ручки не на что не будет влиять (кулер будет стоять на месте). Это происходит из-за того, что транзистор начинает открываться только при напряжении более 0,6 вольт. До этого напряжения с транзистором ничего не происходит.
И вот чтобы напряжение от 0 до 0,6 вольт убрать с переменного резистора мы и вводим в схему постоянный резистор. Именно он возьмет на себя это самое низкое напряжение «мертвой зоны». В итоге переменный резистор будет работать от максимальных оборотов вентилятора до минимальных. Постоянный резистор R2 нужно подбирать. Лучше вначале вместо него поставить подстроечный резистор с сопротивлением около 470 ом. После того как мы подберем нужное сопротивление «мертвой зоны» можно будет ставить и постоянный, до этого подобранным сопротивлением. Оно будет примерно около 100-300 ом.
Что касается самого транзистора. В этой схеме я поставил КТ817. У него максимальный ток, который может пройти через коллектор-эмиттерный переход равен до 3 ампер. Рассеиваемая мощность без радиатора до 1 ватта, а с наличием охлаждающего радиатора эта мощность уже увеличивается аж до 25 ватт. Можно поставить любой другой биполярный транзистор с n-p-n проводимостью, у которого ток коллектор-эмиттер будет больше того, что будет проходит при использовании конкретного вентилятора. Ну, и рассеиваемая мощность должна быть не меньше той, что будет выделяться при конкретном вентиляторе.
Ну, и рассеиваемая мощность должна быть не меньше той, что будет выделяться при конкретном вентиляторе.
Ну, а сама схема работает достаточно просто. Когда мы крутим ручку переменного резистора в сторону уменьшения оборотов вентилятора, то лишнее напряжение отводится на эту транзисторную схему. Проще говоря, лишнюю электрическую мощность на себя забирает эта схема, превращая ее в тепло, которое рассеивается на транзисторе и радиаторе. К сожалению, это является недостатком данной схемы. Ведь при этом не о какой экономии электроэнергии говорить не приходится. Если это для вас важно, то тогда нужно использовать схемы понижающих DC-DC преобразователей, у который с экономией дело обстоит гораздо лучше.
Несмотря на простоту этой схемы она действительно способна вполне линейно регулировать частоту вращения компьютерного вентилятора. Хотя к ней можно подключать не только кулер от компа, с маломощными электродвигателями постоянного тока, рассчитанных на напряжение 12 вольт, она также вполне способна работать. Хотя и напряжение 12 вольт не является ограничением, схема будет работать и при больших напряжениях.
Хотя и напряжение 12 вольт не является ограничением, схема будет работать и при больших напряжениях.
НИЖЕ ВИДЕО ПО ЭТОЙ ТЕМЕ
Простейший регулятор скорости вращения компьютерного вентилятора всего на 3х деталях, схема для регулировки оборотов кулера
Ссылка для просмотра этого видео на моем канале в Дзене
Ссылка на эту статью в Дзене — https://dzen.ru/a/Y7lAs96P5yobAiQG
Как сделать регулятор оборотов электроинструмента: tvin270584 — LiveJournal
?- Производство
- Энергетика
- Техника
- Cancel
 catIsShown({ humanName: ‘технологии’ })” data-human-name=”технологии”> Технологии
catIsShown({ humanName: ‘технологии’ })” data-human-name=”технологии”> ТехнологииНеобходимость выполнения одним видом электроинструмента работ, требующих изменения установленных основных характеристик, приводит к оснащению его дополнительными устройствами. В статье
Зачем нужен плавный пуск для электроинструмента
При выполнении работ своими руками важно, чтобы в электроинструменте был плавный пуск. Это особенно актуально, если часто приходится работать, а сеть не выдерживает напряжения инструмента.
Бюджетный варианты инструмента имеют ряд недостатков:
- У электроинструмента отсутствует возможность плавного, мягкого пуска. Это может привести к перебоям электроэнергии, так как болгарка в первые секунды после включения потребляет большое количество электричества.
 Также есть огромная вероятность порчи электродвигателя и поломки инструмента после того, как осуществлен не мягкий, пуск, а резкий, рывками.
Также есть огромная вероятность порчи электродвигателя и поломки инструмента после того, как осуществлен не мягкий, пуск, а резкий, рывками. - У электроинструмента, особенно простого китайского, нет в наличии регулятора оборотов (регулировкой оборотов можно обеспечить долгую работу инструмента без нагрузки на него).
 Также есть огромная вероятность порчи электродвигателя и поломки инструмента после того, как осуществлен не мягкий, пуск, а резкий, рывками.
Также есть огромная вероятность порчи электродвигателя и поломки инструмента после того, как осуществлен не мягкий, пуск, а резкий, рывками.Поэтому при выборе инструмента очень важно обращать внимание на такие параметры, как регулировка оборотов и наличие плавного пуска.
Что потребуется
Материалы:
- Монтажная коробка;
- Внутренняя розетка;
- Модуль регулятор мощности 2000 Вт;
- Провод с вилкой.
Процесс сборки регулятора оборотов
В крышке монтажной коробки необходимо прорезать отверстие, и установить в нее розетку.
Чтобы она держалась, с внутренней стороны крышки монтажные винты закручиваются в гайки с шайбами или пластину.
К клеммам модуля регулятора мощности присоединяется сетевой шнур с вилкой.
Регулятор устанавливается в штатное отверстие сбоку монтажной коробки.
Сам провод с вилкой заводится через противоположное отверстие. После этого монтажная коробка защелкивается.
Теперь можно регулировать параметры электросети на розетке, тем самым настраивать обороты асинхронных электродвигателей переменного тока.
Именно такие и устанавливаются в электроинструменте типа болгарок, электродрелей, электролобзиков и пр.
Видео
В сюжете – Как сделать регулятор оборотов электроинструмента без знания электроники
В продолжение темы посмотрите также наш обзор Подключение регулятора скорости канального вентилятора
Источник
https://santekhnik-moskva.blogspot.com/2021/09/Kak-sdelat-regulyator-oborotov-elektroinstrumenta.html
инструмент
Donate to this author
Example: livejournal No such user User title (optional)Как сделать схему регулятора скорости двигателя постоянного тока (50В, 15А)
Всем привет! сегодня мы собираемся построить схему регулятора скорости двигателя постоянного тока, способную управлять двигателем постоянного тока 50 В, 15 А. Принципиальная схема, работа и компоненты, используемые при создании этого проекта, подробно объясняются. Это самый полный регулятор скорости двигателя постоянного тока, который вы найдете в Интернете.
Принципиальная схема, работа и компоненты, используемые при создании этого проекта, подробно объясняются. Это самый полный регулятор скорости двигателя постоянного тока, который вы найдете в Интернете.
Вы можете посмотреть это видео по рабочей части проекта
[arve url=”https://www.youtube.com/watch?v=VFlRUC7L3gI” maxwidth=”555″ aspect_ratio=”4:3″ /] Характеристики этого регулятора скорости двигателя постоянного тока:- Этот регулятор скорости принимает входное напряжение от 6 до 50 В .
- МАКС. выходной ток составляет 15 А при использовании надлежащего радиатора,
- Имеют защиту от перенапряжения затвора и
- Защита от обратного хода или скачков напряжения.
После подключения требуемого входа напряжения и двигателя к выходной клемме скорость двигателя можно увеличить или уменьшить с помощью потенциометра.
Содержание
- Технические характеристики данного регулятора скорости двигателя постоянного тока:
- Схема цепи регулятора скорости двигателя постоянного тока
- Требуемые компоненты:
- Упрощение схемы регулятора скорости двигателя постоянного тока
- 90 013 ЦЕПЬ ПЕРЕКЛЮЧЕНИЯ
- ЦЕПЬ ГЕНЕРАТОРА ШИМ
- ЦЕПЬ РЕГУЛЯТОРА НАПРЯЖЕНИЯ
- LM317 Регулятор напряжения
- 555 Таймер 9 0013 IRF3205S n-канальный МОП-транзистор
- Конденсатор 330 мкФ (63 В)
- Конденсатор 220 мкФ (63 В)
- Конденсатор 47 мкФ (63 В)
- Керамические конденсаторы 10 нФ X 3
- Резисторы 1 кОм X 2
- Резистор 330 Ом
- 6,2 Ko мм резистор
- 100-омный резистор
- 1n4007 диоды X 3
- 16A диод Шоттки
- 100k потенциометр
- 33-омный резистор 900 13 Стабилитрон 10 В
Сначала эта схема может показаться очень сложной, поэтому давайте упростим ее. Эта схема разделена на три основные части:
Эта схема разделена на три основные части:
Регулятор напряжения или понижающий преобразователь
ШИМ-генератор.
Цепь переключения.
Теперь давайте разберем каждую часть по отдельности. Я использую настольный блок питания для питания схемы. И установите напряжение около 12 В в качестве входного напряжения для регулятора скорости. Я использую осциллограф для анализа сигналов.
Для лучшего понимания сначала рассмотрим схему переключения:
КОММУТАЦИОННАЯ ЦЕПЬ Коммутационная схема контроллера скорости двигателя постоянного токаСхема переключения используется для включения и выключения выхода на очень высокой частоте. Здесь Mosfet используется для выполнения этой работы.
МОП-транзистор может переключать высокое выходное напряжение между его стоком и истоком, если на его затвор подается пороговое напряжение. Это пороговое напряжение, как правило, очень меньше, чем напряжение, которое Mosfet способен переключать, или напряжение между его стоком и истоком.
Также по мере того, как напряжение на затворе МОП-транзистора превышает пороговое напряжение затвора, все больше и больше тока протекает через сток к истоку.
Предостережение : Пороговое напряжение — это напряжение, при котором МОП-транзистор начинает немного проводить ток. Чтобы полевой МОП-транзистор работал достаточно, чтобы управлять значительной нагрузкой, ему также требуется некоторое дополнительное напряжение.
Таким образом, если двигатель постоянного тока подключен между затвором и истоком MOSFET, напряжение на нем и, следовательно, скорость можно контролировать, контролируя напряжение на затворе. А для этого нам нужно переменное напряжение на воротах. А вот и ШИМ-генератор 9.0010 спешит на помощь.
ЦЕПЬ ГЕНЕРАТОРА ШИМ Цепь генератора ШИМ контроллера скорости двигателя постоянного тока Требуемое переменное напряжение на затворе может быть легко обеспечено с помощью напряжения ШИМ. ШИМ или широтно-импульсная модуляция — это метод, используемый для получения любого напряжения от 0 до максимума входного напряжения. Это достигается коммутацией входного напряжения с определенной частотой и определенной скважностью.
Это достигается коммутацией входного напряжения с определенной частотой и определенной скважностью.
Предположим, у нас есть входное напряжение 5В. Это может быть либо 5 В, либо 0. Теперь, если его включать и выключать с очень высокой частотой, мы получаем прямоугольную форму волны.
Допустим, время включения составляет 50 % от общего времени. Эти 50% называются рабочим циклом волны ШИМ, что дает нам конечное напряжение 2,5 вольта. По мере увеличения этого времени включения или рабочего цикла общее напряжение увеличивается.
И когда рабочий цикл достигает 100%, мы получаем 5 вольт на выходе. Точно так же, когда он равен 0%, мы получаем 0 вольт на выходе. Это называется ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ, поскольку мы модулируем ширину импульса для получения переменного напряжения.
Узнайте больше о ШИМ здесь: ШИМ в деталях
Форма волны ШИМ Схема регулятора скорости здесь генерирует волну ШИМ с помощью таймера 555 IC . Эта ИС обеспечивает требуемое переменное напряжение на затворе MOSFET, работая в нестабильном режиме.
Теперь существует определенный предел входного напряжения ИС, который наверняка меньше предела напряжения этого регулятора скорости.
Следовательно, чтобы обеспечить подходящее рабочее напряжение для ИС таймера 555, используется схема регулятора напряжения, которая обеспечивает фиксированное напряжение для ИС. 9Для этой цели в этой схеме используется регулятор напряжения 0009 LM317 .
ЦЕПЬ РЕГУЛЯТОРА НАПРЯЖЕНИЯ Цепь регулятора напряжения регулятора скорости двигателя постоянного токаВ данном случае используется регулятор напряжения LM317. Он обеспечивает переменное напряжение от 1,25 до 37 вольт. Он используется здесь из-за его нескольких преимуществ по сравнению с другими регуляторами напряжения, такими как Программируемое выходное напряжение , Высокий выходной ток , лучшая линия и регулировка нагрузки.
Узнайте больше о регуляторах напряжения здесь: Регуляторы напряжения в деталях
Как работает эта схема регулятора скорости? Конденсатор емкостью 330 мкФ подключен к клеммам входного питания для сглаживания постоянного тока.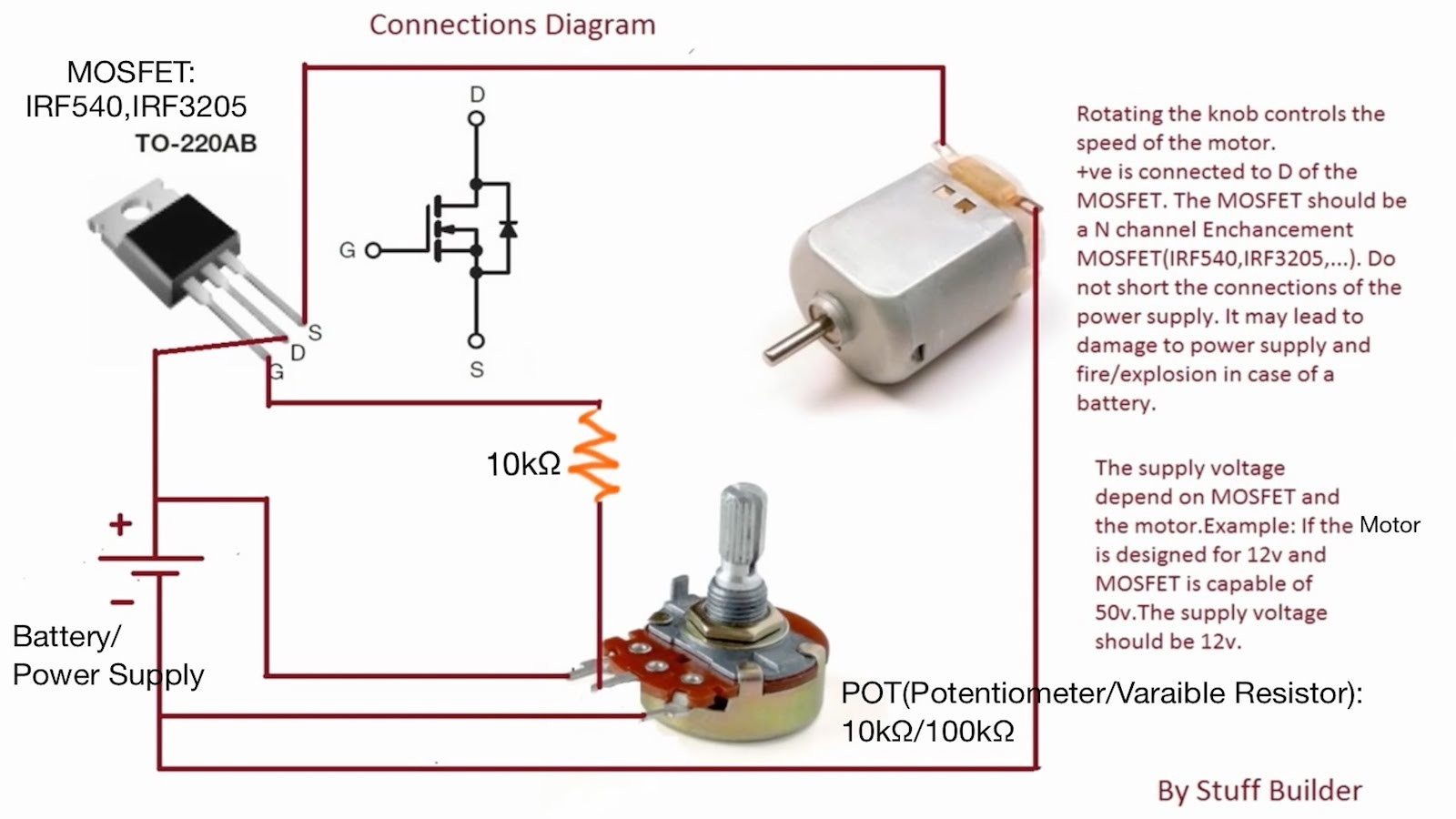 За ним следует последовательно резистор 330 Ом с конденсатором 47 мкФ , образующим фильтр нижних частот, который затем питает регулятор напряжения LM317.
За ним следует последовательно резистор 330 Ом с конденсатором 47 мкФ , образующим фильтр нижних частот, который затем питает регулятор напряжения LM317.
Этот регулятор напряжения программируется с помощью двух резисторов (R3 и R2) , чтобы дать постоянное напряжение 9 вольт.
Стоит отметить, что для получения этого выхода 9 В падение напряжения должно быть больше 2,5 В или входное напряжение должно быть не менее 11,5 В. Чтобы получить выходное напряжение, отличное от этого, вы должны изменить значения этих резисторов в соответствии с частотной формулой, указанной в техническом описании.
| VO = VREF (1 + R2 / R1) + (IADJ × R2) |
Загрузите техническое описание LM317 отсюда: техническое описание LM317
Здесь R2 равен 6,2k, а R1 равен 1k. С г. Яприл. находится в диапазоне мкА, просто игнорируйте его здесь. Это дает нам выходное напряжение 9 вольт. Затем эти 9 вольт питают таймер 555 .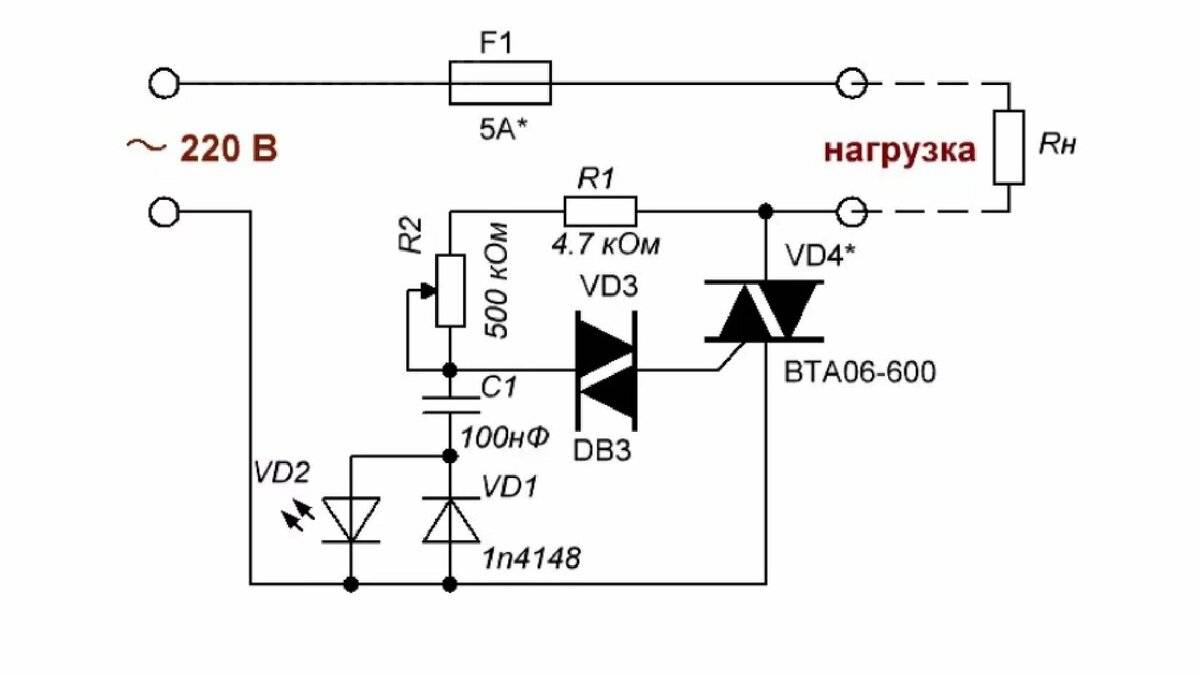 Здесь мы используем таймер 555 в нестабильном режиме или в качестве ШИМ-генератора.
Здесь мы используем таймер 555 в нестабильном режиме или в качестве ШИМ-генератора.
№ контакта. 1 микросхемы заземлен. 2 и 6 соединены вместе, аналогично 4 и 8. Конденсатор 220 мкФ сглаживает поступающие 9 вольт.
Сейчас, Резистор 1K , 2 диода 1N4007 , потенциометр 100k и конденсатор 10 нФ образуют RC-цепь зарядки-разрядки, вызывая ШИМ-выход на третьем выводе таймера 555.
Этот выход ШИМ управляет затвором MOSFET. Если вы хотите узнать больше о таймере 555 и о том, как он генерирует волну ШИМ, я предлагаю вам просмотреть множество отличных статей, доступных в Интернете.
Узнайте больше о 555 таймерах здесь: 555 Таймер подробно
Некоторые проекты таймеров 555 с подробным объяснением: 555 Проекты таймеров
RC-цепь зарядки-разрядки Наиболее важным аспектом волны ШИМ является ее частота, и вот формула частоты таймера 555 для нее. Вы также можете рассчитать частоту выхода ШИМ с помощью онлайн-калькуляторов.
Вы также можете рассчитать частоту выхода ШИМ с помощью онлайн-калькуляторов.
| Частота = 1,44 / (R1+2×R2) × C1 Гц |
вычислители частоты: калькулятор частоты таймера 555
Размещение значение R1 (1 кОм), емкость (около 7 нФ из-за допуска и других факторов) и значение потенциометра, которое составляет примерно 91 кОм в моем случае в формуле дает нам частоту 1100Гц.
Конечно, это не точно из-за нескольких других факторов, влияющих на схему. Фактическая частота составляет 1,3 кГц, что является почти постоянной величиной от 0 до 100% рабочего цикла выхода ШИМ.
Этот выход ШИМ управляет затвором MOSFET , подключенным через резистор 33 Ом. IRF3205S может выдерживать ток до 110 ампер при правильной системе охлаждения и достаточном напряжении затвора. Ограничение напряжения между стоком и истоком составляет максимум 55 В. тогда как напряжение от затвора до источника составляет максимум 20 В.
Исток полевого МОП-транзистора заземлен, а сток подключен к одной клемме выхода, а другая клемма к 12 В. Таким образом, двигатель подключается между + ve источника питания 12 В и стоком MOSFET .
Теперь, чтобы защитить МОП-транзистор от скачков напряжения, вызванных двигателем, диод Шоттки подключен параллельно двигателю или между стоком и плюсом источника питания 12 В.
Узнайте больше об обратноходовых диодах здесь: Основы обратноходовых диодов
Диоды Шоттки, как правило, предпочтительны для обратноходовых диодов, поскольку они имеют наименьшее прямое падение (~0,2 В, а не >0,7 В для малых токов) и способны быстро реагировать на обратное смещение (при повторном включении катушки индуктивности) или Другими словами, диод Шоттки имеет мгновенное обратное время восстановления, поэтому подходит для высокочастотных применений.
Регулятор скорости двигателя постоянного тока в действии Регулятор скорости двигателя постоянного тока в действии Потенциометр управляет скоростью двигателя. А форма сигнала ШИМ, сгенерированная таймером 555, рисуется на осциллографе. Измерения, такие как рабочий цикл и Vpk-pk также можно измерить.
А форма сигнала ШИМ, сгенерированная таймером 555, рисуется на осциллографе. Измерения, такие как рабочий цикл и Vpk-pk также можно измерить.
Для защиты от перенапряжения используйте стабилитрон между затвором и истоком МОП-транзистора, как указано на схеме.
Двигатель, которым я здесь управляю, рассчитан на 12 В и потребляет до 2 А при максимальной нагрузке, что не так уж и много. Следовательно, частота ШИМ 1 кГц здесь подходит, но для больших двигателей частота должна быть выше 15 кГц. А чтобы отрегулировать частоту ШИМ, измените значение потенциометра или конденсатора, чтобы получить желаемую выходную частоту. Так что имейте это в виду при использовании больших нагрузок.
Все о контроллерах двигателей постоянного тока
Двигатели постоянного тока по-прежнему актуальны в современной промышленности, несмотря на то, что они являются одной из старейших конструкций электродвигателей. Как они выдержали испытание временем, особенно против всех удивительных новых машин 21-го века?
Есть много возможных ответов на этот вопрос, но их хорошая управляемость является основной причиной, по которой двигатели постоянного тока сохранились. Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его выводы. Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают достаточную производительность для своей стоимости. В этой статье будут рассмотрены некоторые распространенные контроллеры двигателей постоянного тока, принцип их работы и обсуждены самые популярные приложения для этих систем.
Эта простая машина преобразует постоянный ток в механическое вращение, которым можно управлять, просто изменяя входное напряжение или меняя местами его выводы. Элегантность двигателей постоянного тока привела к производству многих контроллеров двигателей постоянного тока, которые часто имеют простую конструкцию и обеспечивают достаточную производительность для своей стоимости. В этой статье будут рассмотрены некоторые распространенные контроллеры двигателей постоянного тока, принцип их работы и обсуждены самые популярные приложения для этих систем.
Что такое контроллеры двигателей постоянного тока?
Проще говоря, контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока. Существуют контроллеры для щеточных двигателей постоянного тока, бесщеточных двигателей постоянного тока, а также универсальных двигателей, и все они позволяют операторам задавать желаемое поведение двигателя, даже если их механизмы для этого различаются.
В наших статьях о шунтирующих двигателях постоянного тока, двигателях постоянного тока с последовательной обмоткой и бесщеточных двигателях постоянного тока подробно объясняется, как работают машины постоянного тока. Подводя итог, можно сказать, что кривая скорость/момент двигателей постоянного тока является обратно линейной, что означает, что их крутящий момент пропорционально уменьшается по мере увеличения оборотов двигателя. Это позволяет легко управлять, так как снижение скорости увеличивает крутящий момент, и наоборот. Кроме того, в отличие от некоторых двигателей переменного тока, двигатели постоянного тока легко реверсируются простым переключением их выводов, чтобы постоянный ток протекал в противоположном направлении. Контроллеры двигателей постоянного тока используют эти характеристики уникальным образом, и в этой статье будут рассмотрены наиболее популярные методы.
Типы контроллеров двигателей постоянного тока
Ниже приведены некоторые распространенные методы управления двигателем постоянного тока.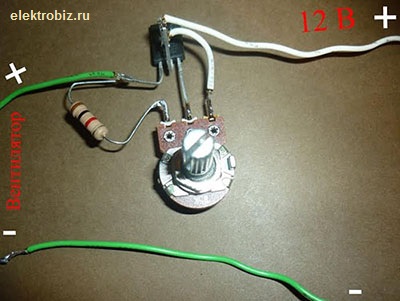 Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять многими способами, включая контроллеры серводвигателей (подробнее см. в нашей статье о контроллерах серводвигателей):
Обратите внимание, что эти методы не являются исчерпывающими и что двигателями постоянного тока можно управлять многими способами, включая контроллеры серводвигателей (подробнее см. в нашей статье о контроллерах серводвигателей):
Контроллер направления: H-мост
H-мостовая схема — один из самых простых способов управления двигателем постоянного тока. На рисунке 1 ниже показана упрощенная принципиальная схема H-моста:
.
Рис. 1: Н-мостовая схема для управления направлением вращения двигателя постоянного тока.
Имеется четыре переключателя, управляемых парами (1 и 4, 2 и 3), и когда любая из этих пар замкнута, они замыкают цепь и приводят двигатель в действие. Таким образом, 4-квадрантный двигатель можно создать, соединив вместе определенные переключатели, при этом смена полярности будет по-разному влиять на двигатель. По сути, эта схема переключает выводы двигателя постоянного тока, который меняет направление вращения по команде.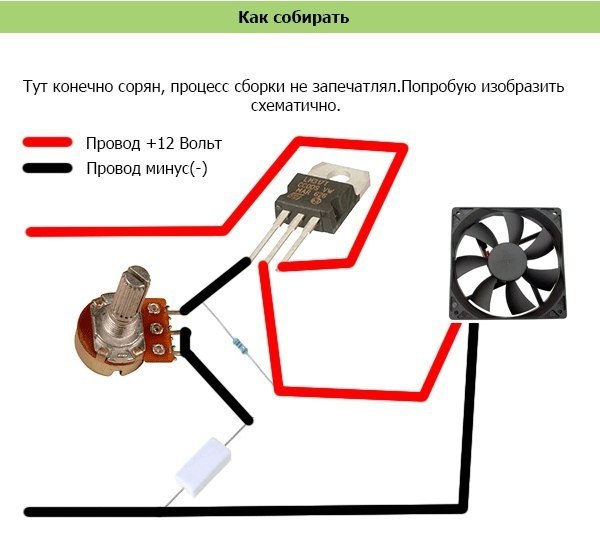 Они легко продаются в виде чипов и могут быть найдены в большинстве микропроцессорных контроллеров, поскольку H-мост можно уменьшить с помощью транзисторов до очень маленьких размеров.
Они легко продаются в виде чипов и могут быть найдены в большинстве микропроцессорных контроллеров, поскольку H-мост можно уменьшить с помощью транзисторов до очень маленьких размеров.
H-мосты могут не только изменять направление вращения двигателя, но и использоваться для управления скоростью. Если требуется только направленное управление, то H-мост будет использоваться в качестве так называемого нерекуперативного привода постоянного тока. Однако для создания рекуперативных приводов постоянного тока можно добавить больше сложности. На рис. 2 показан график, иллюстрирующий работу рекуперативных приводов:
Рис. 2: графики, представляющие направление скорости и крутящего момента при изменении полярности на двигателе постоянного тока. Обратите внимание, как создается движение, когда они работают в одном направлении, и как достигается торможение, когда они противостоят друг другу.
Большинство двигателей постоянного тока замедляются, просто отключая питание двигателя; рекуперативные приводы включают возможности торможения, когда переключение полярности во время работы двигателя вызывает замедление.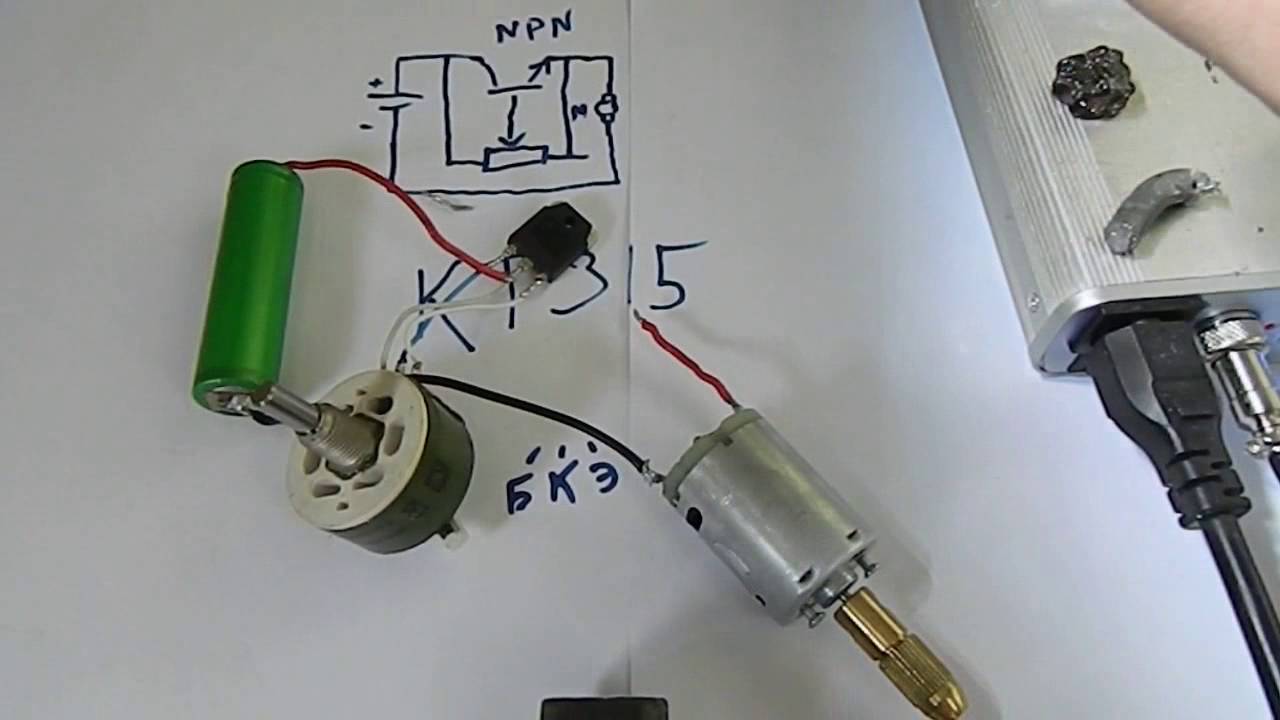
Рисунок 3: Принципиальные схемы для каждого квадранта, показывающие величины напряжения двигателя и питания. Обратите внимание, как направление тока (I
Когда двигатель замедляется, E a (напряжение, создаваемое/используемое двигателем) больше, чем напряжение питания (V a ), и ток будет течь обратно в источник питания. В настоящее время рекуперативное торможение исследуется в электромобилях и других приложениях, которым необходимо максимизировать эффективность. Этот метод не только обеспечивает управление двигателем постоянного тока, но также обеспечивает разумный способ снижения энергопотребления.
Регулятор скорости: широтно-импульсная модуляция (ШИМ)
PWM можно использовать во многих типах двигателей, как показано в нашей статье о контроллерах двигателей переменного тока. По сути, схемы ШИМ изменяют скорость двигателя, имитируя снижение/увеличение напряжения питания. Контроллеры привода с регулируемой скоростью посылают на двигатель периодические импульсы, которые в сочетании со сглаживающим эффектом, вызванным индуктивностью катушки, заставляют двигатель работать так, как если бы он питался от более низкого / более высокого напряжения. Например, если на двигатель 12 В подается ШИМ-сигнал высокого уровня (12 В) в течение двух третей каждого периода и низкого уровня (0 В) в оставшуюся часть, двигатель будет эффективно работать при двух третях полного напряжения. или 8 В. Таким образом, процент снижения напряжения или «рабочий цикл» ШИМ будет изменять скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет почти непрерывно контролировать скорость двигателя. ШИМ часто сочетается с H-мостами, чтобы обеспечить управление как скоростью, направлением, так и торможением.
Например, если на двигатель 12 В подается ШИМ-сигнал высокого уровня (12 В) в течение двух третей каждого периода и низкого уровня (0 В) в оставшуюся часть, двигатель будет эффективно работать при двух третях полного напряжения. или 8 В. Таким образом, процент снижения напряжения или «рабочий цикл» ШИМ будет изменять скорость двигателя. ШИМ легко и недорого реализовать, и можно выбрать практически любой рабочий цикл, что позволяет почти непрерывно контролировать скорость двигателя. ШИМ часто сочетается с H-мостами, чтобы обеспечить управление как скоростью, направлением, так и торможением.
Контроллер якоря: переменное сопротивление
Другой способ повлиять на скорость двигателя постоянного тока — изменить ток, подаваемый либо через катушку возбуждения, либо через якорь. Скорость выходного вала будет изменяться при изменении тока через эти катушки, так как его скорость пропорциональна силе магнитного поля якоря (определяется током). Переменные резисторы или реостаты, включенные последовательно с этими катушками, могут использоваться для изменения тока и, следовательно, скорости. Пользователи могут увеличить сопротивление обмотки якоря, чтобы уменьшить скорость, или увеличить сопротивление статора, чтобы увеличить ее, регулируя сопротивление. Обратите внимание, что этот метод снижает эффективность двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на нагрев, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Пользователи могут увеличить сопротивление обмотки якоря, чтобы уменьшить скорость, или увеличить сопротивление статора, чтобы увеличить ее, регулируя сопротивление. Обратите внимание, что этот метод снижает эффективность двигателя, поскольку увеличение сопротивления означает потерю большего количества энергии на нагрев, и именно поэтому ШИМ является предпочтительным типом контроллера двигателя постоянного тока.
Применение и критерии выбора
При рассмотрении вопроса о покупке контроллера двигателя постоянного тока есть несколько ключевых вопросов, на которые должны ответить либо ваши исследования, либо поставщик. Контроллеры двигателей постоянного тока сложно определить из-за их разнообразия, поэтому приведенный ниже список вопросов будет надежным инструментом при выборе контроллера для вашего проекта. Обязательно найдите самую последнюю информацию о новейших доступных технологиях, связавшись с вашим поставщиком, и ответьте на эти вопросы, чтобы сделать осознанный выбор:
- Каков диапазон номинального напряжения для используемого двигателя и какие части этого диапазона он будет использовать?
- Какой тип управления требуется (скорость, крутящий момент, направление или все три)?
- Какой тип двигателя находится под управлением?
- Какой непрерывный ток может обеспечить контроллер и соответствует ли он постоянному потреблению тока двигателем под нагрузкой?
- Имеет ли система встроенную защиту от перегрузки по току/тепловую защиту?
- Каким будет метод управления при использовании микропроцессорных приводов (ШИМ, R/C, аналоговое напряжение и т. д.)? Необходимо ли программное обеспечение?
- Вам нужен контроллер для двух двигателей (один контроллер для двух независимых двигателей)?
 д.)? Необходимо ли программное обеспечение?
д.)? Необходимо ли программное обеспечение?Доступно столько же контроллеров двигателей постоянного тока, сколько и самих двигателей постоянного тока; их изменчивость является одним из их самых сильных преимуществ. Их применения также столь же многочисленны, как и большинство разработчиков, получающих выгоду от того, что пользователь вносит какой-либо вклад в свой двигатель постоянного тока. В областях робототехники, производства, военного применения, автомобилей и многих других областях контроллеры двигателей постоянного тока используются с отличными результатами. В зависимости от того, как они используются, контроллеры двигателей постоянного тока могут обеспечить простое средство управления с хорошей точностью по приемлемой цене.
Резюме
В этой статье представлено понимание того, что такое контроллеры двигателей постоянного тока и как они работают.