Общие сведения о кинематических схемах
Строительные машины и оборудование, справочник
Категория:
Устройство кранов
Публикация:
Общие сведения о кинематических схемах
Читать далее:
Грузовые лебедки кранов
Общие сведения о кинематических схемах
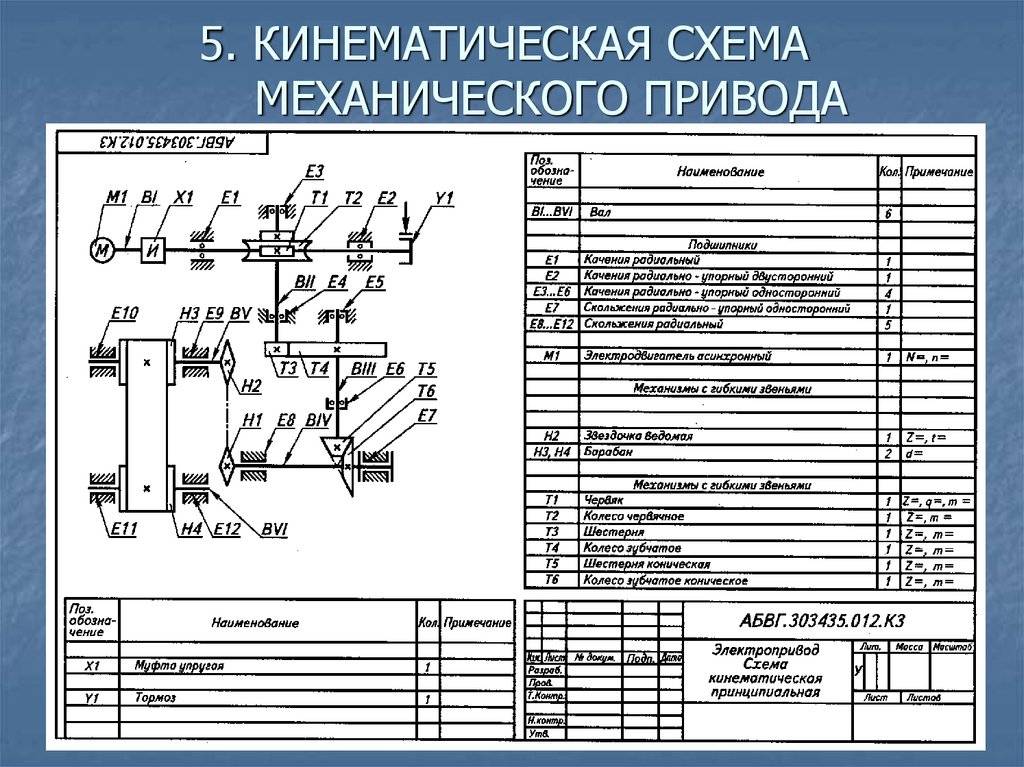
Кинематические схемы показывают взаимодействие элементов механизмов крана во время работы. Детали и элементы механизмов на кинематических схемах изображают условными обозначениями.
Кинематические схемы дают возможность проследить способ передачи вращения от электродвигателя к приводным деталям механизма — ходовому колесу, приводной шестерне механизма поворота, барабану лебедки. Пользуясь кинематической схемой, можно представить себе работу механизма, подсчитать передаточное отношение редуктора и каждой пары и определить линейньге скорости вращения барабана, ходового колеса или приводной шестерни.
Принцип построения кинематических схем разберем на примере схемы стреловой лебедки Л450 крана КБ-100 (рис. 45). Любую кинематическую схему начинают рассматривать с привода. В приведенном примере приводом служит электродвигатель, который закреплен на редукторе. Вал электродвигателя с помощью зубчатой муфты соединен с ведущим (быстроходным) валом редуктора. Вал вращается в подшипниках, установленных в корпусе редуктора. На наружном конце этого вала закреплен на глухой (с помощью шпонки) посадке тормозной шкив диаметром 200 мм, охватываемый колодками тормоза. На валу установлена также на шпонке косозубая ведущая шестерня, имеющая П зубьев (z=ll) с модулем т, равным 4 мм. Модуль-это условная величина, равная отношению диаметра начальной окружности зубчатого колеса к числу зубьев. В зацеплении с этой шестерней находится ведомая (также косозубая) шестерня, сидящая на промежуточном валу, которая имеет 63 зуба.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Рис.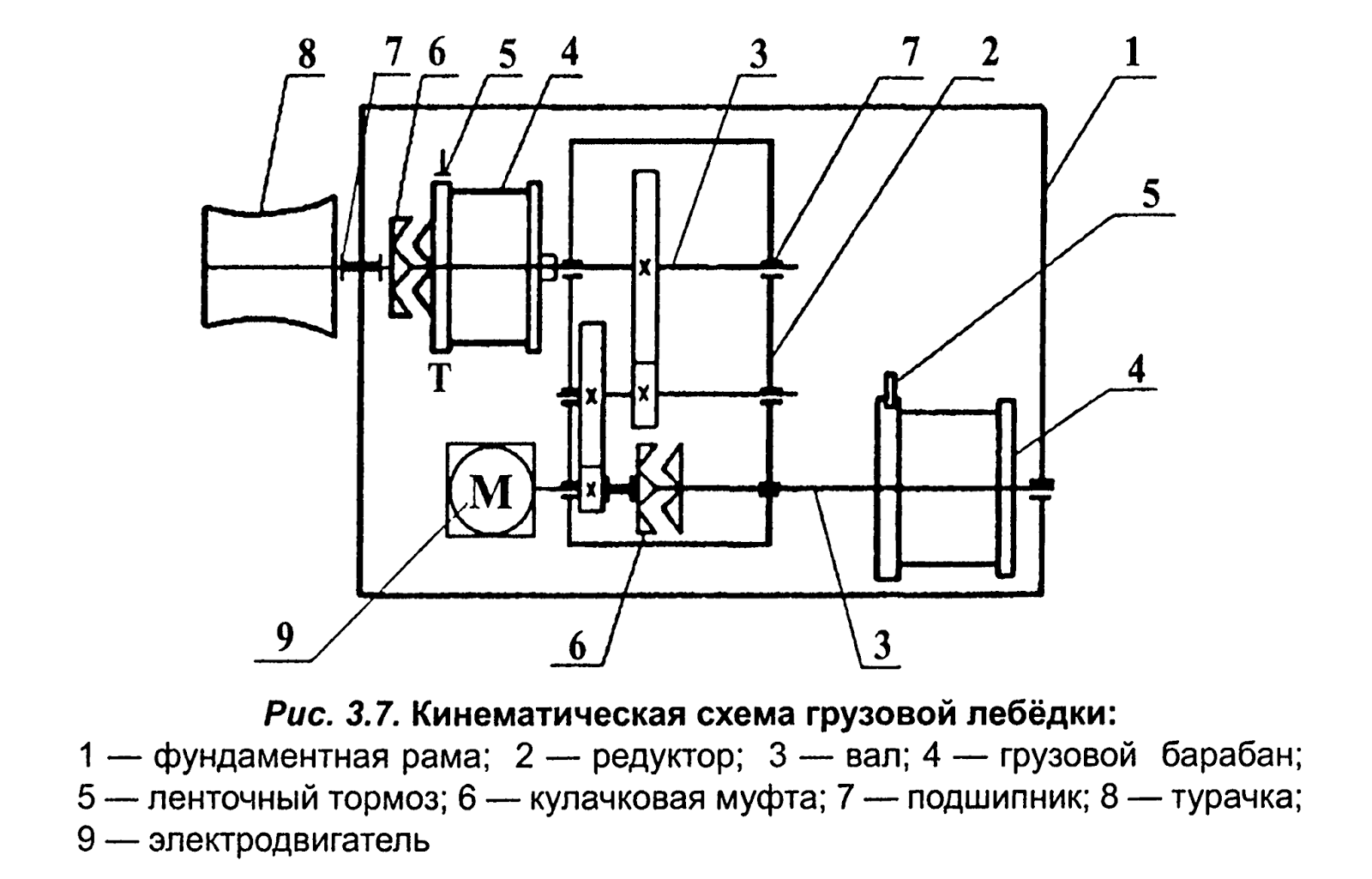
1, 3, 5, 10 — зубчатые шестерни и колеса, 2, 4, 6
Промежуточный вал вращается также на подшипниках и несет на себе ведущую шестерню с зубьями с модулем. В зацеплении с этой шестерней находится зубчатое колесо (г = 82, т = 6) с косыми зубьями. Шестерня сидит на выходном (тихоходном) валу, который заканчивается фланцем, соединенным болтами с барабаном. Второй конец барабана опирается на ось, закрепленную в радиальном подшипнике, принадлежащем выносной опоре. На кинематических схемах часто указывают также и номера примененных подшипников, например на схеме лебедки № 209, 213, 217, 1316.
Рекламные предложения:
Читать далее: Грузовые лебедки крановКатегория: – Устройство кранов
Главная → Справочник → Статьи → Форум
1. | |
2. Неподвижное звено (стойка). Для указания неподвижности любого звена часть его контура покрывают штриховкой, например, | |
| |
5. Соединение частей звена |
|
а) неподвижное | |
б) неподвижное, допускающее регулировку | |
в) неподвижное соединение детали с валом, стержнем | |
| |
6. а) вращательная | |
б) вращательная многократная, например, двукратная | |
в) поступательная | |
г) винтовая | |
д) цилиндрическая | |
е) сферическая с пальцем | |
ж) карданный шарнир | |
з) сферическая (шаровая) | |
и) плоскостная | |
к) трубчатая (шар-цилиндр) | |
л) точечная (шар-плоскость) | |
7. |
|
а) радиальные | |
| |
в) упорные | |
8. Подшипники скольжения: |
|
а) радиальные | |
| |
в) радиально-упорные: односторонние | |
двусторонние | |
г) упорные: |
|
односторонние | |
двусторонние | |
9. |
|
| а) радиальные | |
| |
д) радиально-упорные: |
|
односторонние | |
двусторонние | |
| |
ж) упорные: |
|
односторонние | |
двусторонние | |
| |
10. | |
11. Муфта нерасцепляемая (неуправляемая) |
|
а) глухая | |
| |
в) упругая | |
| г) компенсирующая | |
| |
12. Муфта сцепляемая (управляемая) |
|
а) общее обозначение | |
б) односторонняя | |
в) двусторонняя | |
13. |
|
а) синхронная, например, зубчатая | |
б) асинхронная, например, фрикционная | |
| |
13а. Муфта сцепляемая электрическая | |
13б. Муфта сцепляемая гидравлическая или пневматическая | |
14. Муфта автоматическая (самодействующая) |
|
а) общее обозначение | |
б) обгонная (свободного хода) | |
в) центробежная фрикционная | |
г) предохранительная |
|
с разрушаемым элементом | |
с не разрушаемым элементом | |
15. | |
16. Кулачки плоские: |
|
а) продольного перемещения | |
б) вращающиеся | |
в) вращающиеся пазовые | |
17. Кулачки барабанные: |
|
а) цилиндрические | |
б) конические | |
в) криволинейные | |
18. |
|
а) заостренный | |
б) дуговой | |
в) роликовый | |
г) плоский | |
19. Звено рычажных механизмов двухэлементное |
|
а) кривошип, коромысло, шатун | |
б) эксцентрик | |
в) ползун | |
г) кулиса | |
20. | |
Примечания: |
|
1. Штриховку допускается не наносить. |
|
2. Обозначение многоэлементного звена аналогично двух- и трехэлементному |
|
| |
24. Храповые зубчатые механизмы: |
|
а) с наружным зацеплением односторонние | |
б) с наружным зацеплением двусторонние | |
в) с внутренним зацеплением односторонние | |
г) с реечным зацеплением | |
25. |
|
а) с наружным зацеплением | |
б) с внутренним зацеплением | |
в) общее обозначение | |
26. Передачи фрикционные: |
|
а) с цилиндрическими роликами | |
б) с коническими роликами | |
в) с коническими роликами регулируемые | |
г) с криволинейными образующими рабочих тел и наклоняющимися роликами регулируемые | |
д) торцовые (лобовые) регулируемые | |
е) со сферическими и коническими (цилиндрическими) роликами регулируемые | |
ж) с цилиндрическими роликами, преобразующие вращательное движение в поступательное | |
з) с гиперболоидными роликами, преобразующими вращательное движение в винтовое | |
и) с гибкими роликами (волновые) | |
27. | |
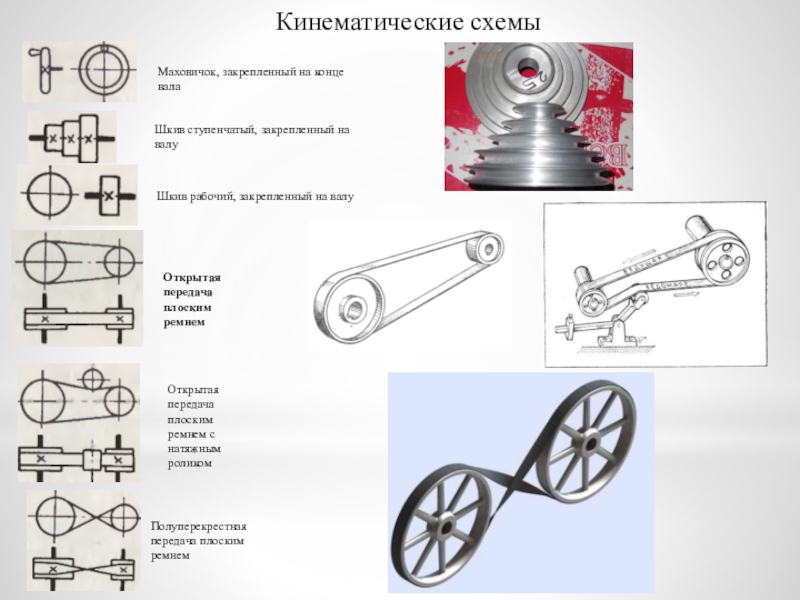
28. Шкив ступенчатый, закрепленный на валу | |
29. Передача ремнем без уточнения типа ремня | |
30. Передача плоским ремнем | |
31. Передача клиновидным ремнем | |
32. Передача круглым ремнем | |
33. Передача зубчатым ремнем | |
34. |
|
а) общее обозначение без уточнения типа цепи | |
б) круглозвенной | |
в) пластинчатой | |
г) зубчатой | |
35. Передачи зубчатые (цилиндрические): |
|
а) внешнее зацепление (общее обозначение без уточнения типа зубьев) | |
б) то же, с прямыми, косыми и шевронными зубьями | |
в) внутреннее зацепление | |
г) с некруглыми колесами | |
35а. | |
36. Передачи зубчатые с пересекающимися валами и конические: |
|
а) общее обозначение без уточнения типа зубьев | |
б) с прямыми, спиральными и круговыми зубьями | |
37. Передачи зубчатые со скрещивающимися валами: |
|
а) гипоидные | |
б) червячные с цилиндрическим червяком | |
в) червячные глобоидные | |
38. |
|
а) общее обозначение без уточнения типа зубьев | |
| |
38а. Передача зубчатым сектором без уточнения типа зубьев | |
39. Винт, передающий движение | |
40. Гайка на винте, передающем движение: |
|
а) неразъемная | |
б) неразъемная с шариками | |
в) разъемная | |
41. |
|
а) цилиндрические сжатия | |
б) цилиндрические растяжения | |
в) конические сжатия | |
г) цилиндрические, работающие на кручение | |
д) спиральные | |
е) листовые: |
|
Одинарная | |
Рессора | |
ж) тарельчатые | |
42. | |
43. Конец вала под съемную рукоятку | |
| |
45. Рукоятка | |
46. Маховичок | |
47. Передвижные упоры | |
| |
49. Гибкий вал для передачи вращающего момента | |
|
 Кинематическая пара
Кинематическая пара Подшипники
скольжения и качения на валу (без
уточнения типа):
Подшипники
скольжения и качения на валу (без
уточнения типа): Подшипники
качения:
Подшипники
качения: Муфта.
Общее обозначение без уточнения типа
Муфта.
Общее обозначение без уточнения типа Муфта
сцепляемая механическая
Муфта
сцепляемая механическая Тормоз.
Общее обозначение без уточнения типа
Тормоз.
Общее обозначение без уточнения типа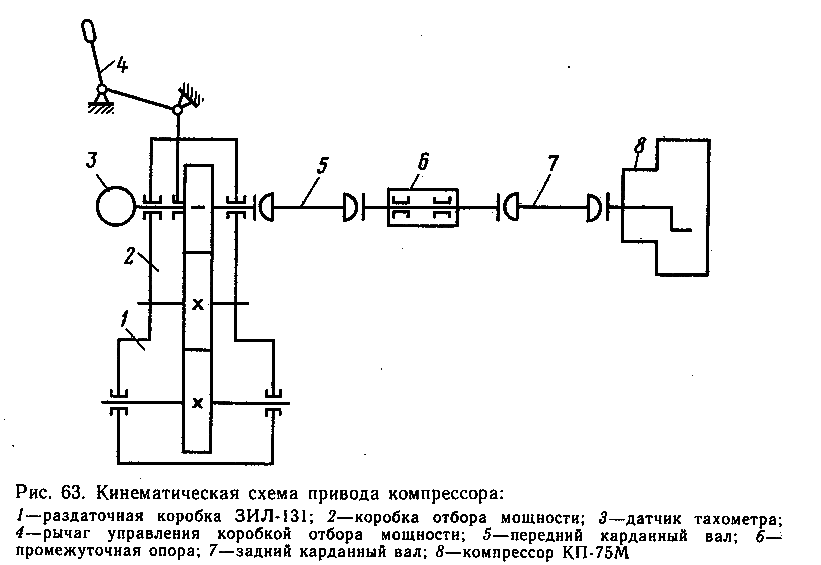 Толкатель
(ведомое звено)
Толкатель
(ведомое звено)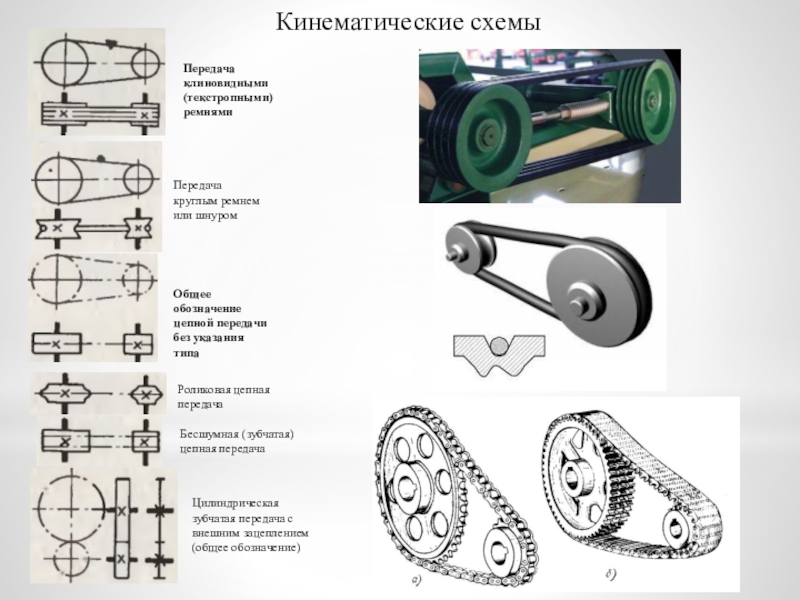 Звено
рычажных механизмов трехэлементное
Звено
рычажных механизмов трехэлементное Мальтийские
механизмы с радиальным расположением
пазов у мальтийского креста:
Мальтийские
механизмы с радиальным расположением
пазов у мальтийского креста: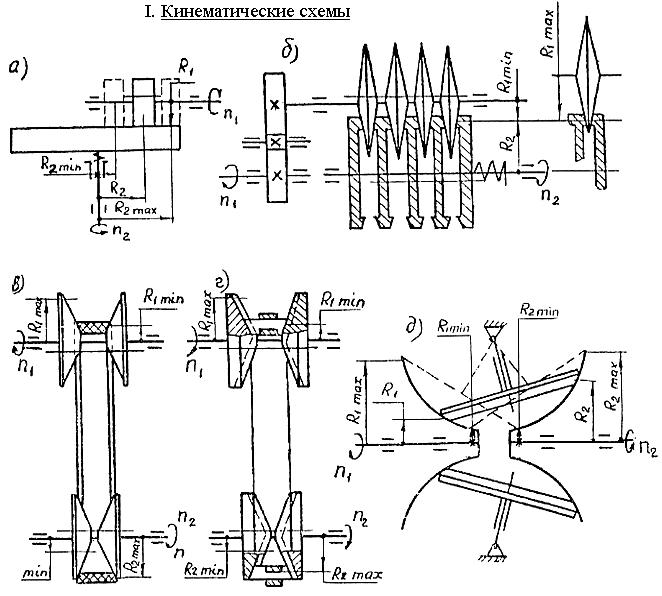 Маховик
на валу
Маховик
на валу Передача
цепью:
Передача
цепью: Передачи
зубчатые с гибкими колесами (волновые)
Передачи
зубчатые с гибкими колесами (волновые) Передачи
зубчатые реечные:
Передачи
зубчатые реечные: Пружины:
Пружины: Рычаг
переключения
Рычаг
переключенияКинематические схемы и степени свободы
Кинематические схемы и степени свободы Скачать для чтения офлайнРеклама
Кинематические схемы и усилители степеней свободы
- Ken Youssefi Mechanical & Aerospace 1
Кинематические (палочные или скелетные) диаграммы
Полосатый (упрощенный) рисунок, показывающий основные элементы, необходимые для
кинематический анализ.
 Все звенья пронумерованы, а соединения обозначены буквами.
Механизм открытия и закрытия окна Кинематическая схема
Все звенья пронумерованы, а соединения обозначены буквами.
Механизм открытия и закрытия окна Кинематическая схема - Кен Юсефи Механическая и аэрокосмическая промышленность 2 Кинематические (палочные или скелетные) диаграммы
- Кен Юсефи Механическая и аэрокосмическая промышленность 3 Кинематические (палочные или скелетные) диаграммы Указание жесткая связь Указание фиксированный угол тарелка Гидравлический привод
- Кен Юссефи Механическая и аэрокосмическая промышленность 4 Степени свободы Объект в космосе имеет шесть степеней свободы. • Трансляция – перемещение по осям X, Y и Z. ось (три степени свободы) • Вращение – вращение вокруг осей X, Y и Z. (три степени свободы)
- Кен Юсефи Механическая и аэрокосмическая промышленность 5 Степени свободы (DOF) Планарные (2D) механизмы Степени свободы – количество независимых координат необходимо полностью указать положение ссылки Три независимые координаты необходимо указать местонахождение звено AB, xA, yA и угол θ Свободное звено на плоскости имеет три степени свобода, механизм с L звеньями имеет 3L степеней свободы
- Кен Юсефи Механическая и аэрокосмическая промышленность 6
Тип соединения – кинематические пары
Нижние пары – движение передается через
площадь контакта, штифтовые и ползунковые соединения. Высшие пары – движение передается через
линейный или точечный контакт; шестерни, ролики и
сферические суставы.
- Кен Юсефи Механическая и аэрокосмическая промышленность 7 Степени свободы (DOF) — тип суставов, нижние пары Каждое контактное соединение удаляет два степени свободы относительного движения между двумя последовательными ссылками. Ползунок ограничен от перемещения вертикальном направлении, а также ограничено вращением в плоскости. Суставы с двумя степенями свободы иногда называют половинкой сустава (Нортон). Сферическая пара представляет собой шаровой шарнир, 3 степени свободы. Винтовая пара имеет скользящую и вращательное движение, связанное с винтовой линией угол винта. Плоская пара используется редко
- Кен Юссефи Механическая и аэрокосмическая промышленность 8 Степени свободы (DOF) – тип суставов, Старшие пары Роликовый контакт, 2 степени свободы Роликовый контакт (без скольжения), 1 степень свободы Шестерни – скользящее и вращательное движение между двумя зубьями, 2 степени свободы
- Кен Юссефи Механическая и аэрокосмическая промышленность 9 Степени свободы (DOF) – тип суставов, Старшие пары Ремень и шкив (без скольжения) или цепь и звездочка — 1 DOF Пружина – не влияет на степень свободы механизма
- Кен Юссефи Механическая и аэрокосмическая промышленность 10 Степени свободы (DOF) Уравнение Куцбаха (модифицированное Гроублера) DOF = степень свободы или подвижности L = количество звеньев, включая наземное звено J1 = количество соединений с 1 степенью свободы (полные соединения) J2 = количество 2 степеней свободы (полушарниры) DOF ≤ 0 структура механизмDOF > 0 DOF = 3(L – 1) – 2J1 – J2
- Кен Юссефи Механическая и аэрокосмическая промышленность 11 Степень свободы (DOF) – пример L = 4, J1 = 4 контакта, J2 = 0 DOF = 3(L – 1) – 2J1 – J2 Степень свободы = 3 (4 – 1) – 2 (4) – (0) = 1 1 DOF означает только один вход (источник питания) необходим для управлять механизмом L = 4, J1 = 3 контакта + 1 ползунок = 4 J2 = 0 Степень свободы = 3 (4 – 1) – 2 (4) – (0) = 1 Четырехрычажный механизм Кривошипно-шатунный механизм
- Кен Юсефи Механическая и аэрокосмическая промышленность 12
Степени свободы (DOF) – траншейная мотыга
Количество звеньев, L = 12, Количество соединений одной степени свободы, J1 = 12 (штифты) + 3 (ползун) = 15,
Количество двух степеней свободы, J2 = 0
DOF = 3(L – 1) – 2J1 – J2 = 3(12-1) -2(15) = 3
12 11
10
98
7
6
5
1
2
3
4
11, 12
1
2
3
4
5
6
7
8
9
10
3 гидравлики используются для управления
положение ковша.
- Кен Юсефи Механическая и аэрокосмическая промышленность 13 Степень свободы (DOF) — пример Количество звеньев, L = 7, 1 1 1 2 3 4 5 6 7 Количество соединений с одной степенью свободы, J1 = 6 (штифты) + 1 (ползун) = 7, Количество двух шарниров степени свободы, J2 = 1 (вилочное соединение) DOF = 3(L – 1) – 2J1 – J2 = 3(7-1) – 2(7) – 1 = 3 Вилка Слайдер Весна Для управлять механизмом
- Кен Юссефи Механическая и аэрокосмическая промышленность 14 Парадоксы Два ролика соприкасаются, без проскальзывания L = 3, J1 = 3, J2 = 0 DOF = 3 (3-1) – 2 (3) = 0 Резервная поддержка 2 3 4 5 L = 5, J1 = 6, J2 = 0 DOF = 3 (5-1) – 2 (6) = 0
 Все звенья пронумерованы, а соединения обозначены буквами.
Механизм открытия и закрытия окна Кинематическая схема
Все звенья пронумерованы, а соединения обозначены буквами.
Механизм открытия и закрытия окна Кинематическая схема Высшие пары – движение передается через
линейный или точечный контакт; шестерни, ролики и
сферические суставы.
Высшие пары – движение передается через
линейный или точечный контакт; шестерни, ролики и
сферические суставы.
Реклама
РЕШЕНИЕ: MECH 212 Humber College Кинематическая диаграмма Вопросы
Humber College MECH 212
undefinedЭто графическое и аналитическое задание.
Вы будете работать с двумя распространенными типами механизмов: четырехрычажной связью и ползунком.
Приведена кинематическая схема. Вы должны использовать правильный масштаб для рисования и мгновенных центров.
Вы должны использовать правильный масштаб для рисования и мгновенных центров.
Четырехрычажный стол O2O4 = 800 мм
не определено№ | O2A 900 84 | AB | AM | O4B | θ° |
200 | 580 | 300 | 710 900 84 | 20 | |
2. | 210 | 600 | 840 | 710 | 9008 1|
3. | 200 | 600 | 400 | 480 | 60 |
4. | 320 | 980 | 200 | 620 | 130 |
5. | 300 | 970 | 1200 | 615 | 100 |
220 | 590 | 720 | 700 | 900 02 30 | |
7. | 300 | 1100 | 520 | 610 | 50 |
8. | 220 | 620 | 800 | 680 | 120 |
9. | 320 | 10 00 | 800 | 590 | 150 |
10. | 300 | 80 0 | 100 | 600 | 30 |
11 | 200 | 600 | 400 | 500 | 45 |
12. | 240 | 600 | 250 | 700 | 150 9008 4 |
13. | 300 | 760 | 500 900 84 | 500 | 70 |
14. | 210 | 630 9008 4 | 320 | 650 | 60 |
15. | 200 | 580 | 300 | 710 | 60 |
16. | 210 | 600 | 840 | 710 | 30 | 9010 5
17. | 200 | 600 | 400 | 480 | 40 |
18. | 320 | 980 | 200 | 9000 2 620 | 50 |
19. | 300 | 970 | 9000 2 1200 | 615 | 60 |
20. | 220 | 590 | 72 0 | 700 | 70 |
21. | 30 0 | 1100 | 520 | 610 | 80 |
| 900 02 22. | 220 | 620 | 800 | 680 | 110 |
23 . 084 | 120 | ||||
24. | 300 | 800 | 100 900 84 | 600 | 130 |
25. | 200 | 600 | 400 9000 3 | 500 | 140 |
26. | 240 900 03 | 600 | 250 | 700 | 150 |
2 7. | 300 | 760 | 500 | 500 | 200 |
28. 9000 3 | 210 | 630 | 320 | 650 | 900 81|
29. | 200 | 580 | 300 | 900 81240 | |
30. | 210 | 600 | 840 | 9008 1250 | |
31. | 200 | 900 81400 | 480 | 300 | |
32. 900 84 | 320 | 980 | 200 | 620 | 310 |
33. | 9008 1970 | 1200 | 615 | 32 0 | |
34. | 220 | 590 | 720 | 700 | 330 |
35. | 300 | 1100 | 520 | 900 02 610 | 25 |
36. | 220 | 900 02 620 | 800 | 680 | 35 |
37. | 9008 11000 | 800 | 590 | 45 | |
38. | 300 | 800 | 100 | 600 | 55 |
39 . 0084 | 65 | ||||
40. | 240 | 600 | 250 | 700 9008 4 | 75 |
41. | 300 | 760 9008 4 | 500 | 500 | 115 |
42. | 200 900 84 | 580 | 300 | 710 | 125 |
43. | 210 9008 4 | 600 | 840 | 710 | 135 | 44. | 200 | 600 | 400 | 480 | 900 81
45. | 320 | 980 | 200 | 620 | 9000 2 155 |
46. | 300 | 970 | 900 02 1200 | 615 | 215 |
47. | 220 | 900 02 590 | 720 | 700 | 225 |
48. | 300 | 9008 1520 | 610 | 235 | |
220 | 620 | 800 | 680 | 900 02 245 | |
50. | 320 | 1000 | 800 | 590 | 900 02 295 |
51. | 300 | 800 | 90 002 100 | 600 | 305 |
52. | 200 | 900 02 600 | 400 | 500 | 60 |
53. | 240 | 600 | 250 | 700 | 120 |
300 | 760 | 500 | 500 | 900 02 70 | |
55. | 210 | 630 | 320 | 650 | 140 |






Студент | No. Вади, Ягник Д. | 35 |
 0081
0081https://www.randomlists.com/random-numbers?min=1&max=32&qty=32&dup=false 90 003 undefined
Студенты выбираются случайным образом.
undefinedВы должны обрабатывать для каждого упражнения не менее 3 листов бумаги:
- Положения механизма.
- Скорость и мгновенные центры
- Комментарии по движению механизма и расчеты.
Упражнение №. 1
undefined- Изобразите положения этого четырехзвенного рычажного механизма, когда:
240°, 270°, 300°, 325° , 330o и конечно не забывайте внутри между мёртвыми позициями.
- Нарисуйте траекторию или траекторию точки М.
- Комментарий движения звеньев механизма.
- Найти мгновенный центр для данного момента, определяемого значением угла φ, если O2A вращается со скоростью 120 об/мин против часовой стрелки
- Найдите скорость B (м/с), используя метод относительной скорости и мгновенный центр.
- Найти значение угловой скорости (об/мин) звена 4 в данный момент.
- Найти угловую скорость (об/мин) лин АВ в данный момент.
- Найдите скорость M (м/с), используя метод относительной скорости и мгновенный центр.

Файл следует бросать ТОЛЬКО в сообщениях курса. Электронная почта должна называться Фамилия Имя Назначение 1. (Гушо Димитри Назначение 1)
У каждого задания должна быть титульная страница.
Система единиц измерения – ISO.
Все чертежи должны быть представлены аккуратно, а пояснения — в хорошем техническом письме.
Решение должно быть написано четко.
Humber CollegeMECH 212
undefinedТаблица кривошипно-шатунного механизма
undefined№ | O2A | AB | AM | Смещение | φ° | 9010 5
1. | 200 | 600 | 100 | 9008 120 | |
2. | 210 | 510 | 140 | -60 | 45 |
3. | 300 | 520 | 120 | +70 | 50 |
4. | 90 081540 | 120 | +80 | 30 | |
5. | 220 | 560 | 120 | -70 | 30 |
120 | |||||
7. | 200 | 480 9008 4 | 200 | +50 | 60 |
8. | 220 | 600 | 200 | +40 | 120 |
9. | 300 | 620 | 200 | +30 | 130 |
300 | 500 | 200 | 0 | 150 | |
11. | 300 | 400 | 200 | -60 | 100 |
12. | 240 | 400 | 250 900 03 | -50 | 60 |
13. | 300 | 580 | 200 9008 4 | -40 | 150 |
14. | 200 9008 4 | 500 | 300 | -30 | 70 |
15. | 200 | 600 | 100 | 0 | 70 |
16. | 9 0081510 | 140 | +60 | 2 30 | |
17. | 300 | 520 | 120 | 900 81240 | |
18. | 210 | 540 | 120 | 9000 2 -60 | 250 |
19. | 220 | 9000 2 560 | 120 | -70 | 300 |
20. 9008 4 | 220 | 600 | 200 | +80 | 310 |
21. | 200 | 480 | 200 | -70 | 320 |
22. | 220 | 600 | 200 | -60 | 330 |
23. | 300 | 620 | 200 | -50 | 25 |
24. | 300 | 500 | 200 | +40 | 35 |
25. | 300 | 400 | 200 | 0 | 45 |
26. | 240 | 9 0081250 | +40 | 55 | |
300 | 580 | 200 | -40 9008 4 | 65 | |
28. | 200 | 500 | 300 | +40 | 75 |
29. | 200 | 600 | 100 | -40 | 115 |
30. | 210 | 9008 1840 | 0 | 125 | |
31. | 200 | 60 0 | 100 | -50 | 135 |
32 | 210 | 510 | 140 | +50 | 145 |
33. | 300 | 520 | 120 | -50 | 155 |
34. | 210 | 540 | 120 9008 4 | +50 | 215 |
35. | 220 | 5 60 | 120 | 0 | 225 |
36. | 200 | 480 9008 4 | 200 | +60 | 235 |
37. | 220 | 600 | 200 | +60 | 245 9008 4 |
38. | 300 | 620 | 200 | -60 | 295 |
39. | 300 | 500 | 200 | 9000 2 -60 | 305 |
40. | 300 | 400 900 84 | 200 | -70 | 60 |
41. | 200 | 600 | 10 0 | -60 | 120 |
42. | 21 0 | 510 | 140 | -50 | 70 |
43. | 300 | 520 | 120 | +40 | 140 |
44. | 210 | 540 | 120 | 0 | 230 |
45. | 220 | 560 | 120 900 03 | -40 | 240 |
46. | 220 | 600 | 200 9008 4 | 0 | 250 |
47. | 200 | 480 | 200 | -40 | 300 |
48. 9000 3 | 220 | 600 | 200 | +40 | 150 |
49. | 300 | 620 | 200 | 0 | 100 |
50. | 300 | 500 | 200 | 900 8160 | |
51. | 300 | 400 | 200 | 9000 2 -50 | 150 |
52. | 240 | 9000 2 400 | 250 | +70 | 70 |
53. | 300 | 580 | 200 | +80 | 70 |
54. | 200 | 500 | 300 | -70 | 230 |
55. | 200 | 600 | 100 | +60 | 240 |




Вы должны обработать не менее 3 листов бумаги:
- Положения механизма.
- Скорость и мгновенные центры
- Комментарии по движению механизма и расчеты.
Упражнение № 2
undefined- Изобразите положения этого кривошипно-шатунного механизма, когда:
5°, 150°, 180°, 225°, 240°, 270°, 300°, 325°, 330° и, конечно же, не забывайте про мертвые позиции.