10.2.3. Кинематические схемы металлорежущих станков
Под кинематической схемой металлорежущего станка понимают условное изображение всех механизмов и передач, которые передают движение от привода к исполнительным органам станка.
Кинематическая цепь главного движения. Привод главного движения станка модели 1А616 (рис. 10.9) состоит из коробки скоростей, смонтированной в передней тумбе, и механизма перебора, смонтированного вместе со шпинделем в передней бабке.
Рис. 10.9. Кинематическая схема токарно-винторезного станка 1А616
Движение с вала I электродвигателя (N = 4,5 кВт; n = 1440 об/мин) передается на вал II через клиноременную передачу с диаметрами шкивов 135–168 мм; на вал III – через зубчатые передачи 41–26, 39–31, 14–55. Вал III имеет три частоты вращения.
С вала III на вал IV движение передается через зубчатые передачи
 Вал IV имеет
12 частот вращения. Скорости переключаются
блоками Б1, Б2, Б3 и зубчатым колесом z = 55, сидящими
на валах на скользящих шпонках.
Вал IV имеет
12 частот вращения. Скорости переключаются
блоками Б1, Б2, Б3 и зубчатым колесом z = 55, сидящими
на валах на скользящих шпонках.С вала IV движение клиноременной передачей с диаметрами шкивов 174–174 мм передается полому валу V, а далее через зубчатые передачи 34–68 и 20–80 – на шпиндель VII. Переключением муфты М1 влево вращение вала V передается шпинделю VII. Шпиндель станка имеет 24 частоты вращения (11–2240 об/мин).
Кинематическая цепь подачи. Цепь движения подачи суппортов станка начинается с вала VII (шпинделя). Движение с вала VII на вал X передается через реверсивный механизм зубчатыми передачами 34–44–22–34 или 34–44–44–34. Переключение колеса z = 34 на скользящей шпонке
реверсирует направление движения подач суппортов, с вала X движение передается на ведущий вал XII коробки подач через передачи 30–66–36.
Включением муфт М2 и М3 и переключением блоков Б5, Б6, Б7 и Б8 коробки подач движение с вала XII передается через соответствующие зубчатые передачи на ходовой валик XXI станка. Механизм коробки подач обеспечивает 48 частот вращения ходового валика. Однако вследствие близкого совпадения ряда частот вращения практически коробка подач обеспечивает только 22 частоты вращения ходового валика и, следовательно, 22 продольные или поперечные подачи.
С ходового валика XXI движение передается на вал XXII фартука станка червячной передачей 2–35. Включением муфты М6 движение передается с вала XXII через зубчатые передачи 31–53
Кинематическая цепь нарезания резьбы. При нарезании резьб с шагом до 6 мм движение в коробку подач передается от шпинделя. Резьбы с более крупным шагом нарезают при включенном переборе с использованием звена увеличения шага. Для этого блок Б4 смещают вправо, пока зубчатое колесо z = 44 не войдет в зацепление с колесом z = 34, закрепленным на валу V. В этом случае движение в коробку подач передается от вала V; с вала X на вал XII коробки подач – через блоки С 1 и С2 сменных зубчатых колес.
При
нарезании дюймовых резьб кулачковую
муфту М2 выключают. Колесо z =
51 зацеплено с колесом z =
30 вала XII,
а колесо z =
39 вала XV введено
в зацепление c колесом z =
39 блока 22–39,
свободно сидящим на валу XIV.
При нарезании метрических и модульных
резьб включают муфту М2, колесо z =
51 выводят из зацепления, а колесо z =
39 перемещают по валу XV вправо
до зацепления с колесом z =
39, жестко закрепленным на валу XIV.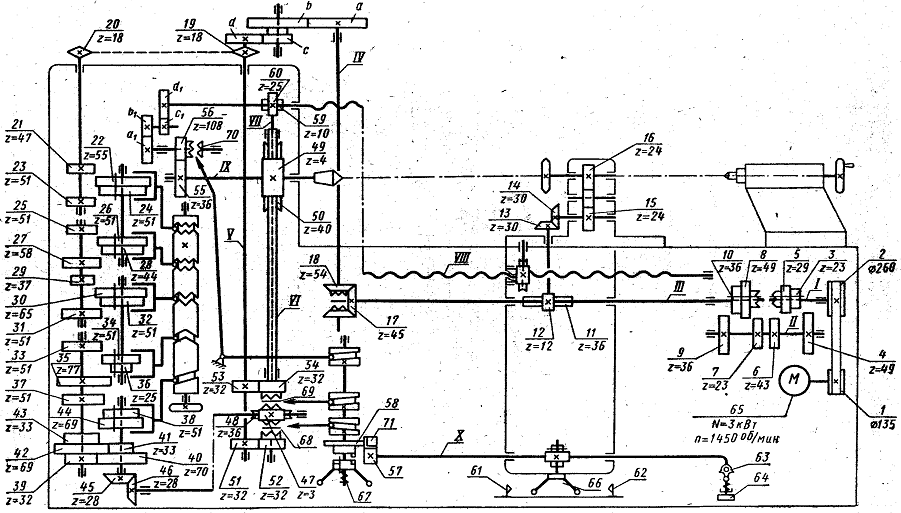
Суппорт станка при нарезании резьб получает движение от коробки подач через кулачковую муфту M4, промежуточный валик XVIII и ходовой винт XX.
Кинематические схемы металлорежущих станков — Студопедия
Поделись с друзьями:
Под кинематической схемой металлорежущего станка понимают условное изображение всех механизмов и передач, которые передают движение от привода к исполнительным органам станка.
Кинематическая цепь главного движения. Привод главного движения станка модели 1А616 (рис. 10.9) состоит из коробки скоростей, смонтированной в передней тумбе, и механизма перебора, смонтированного вместе со шпинделем в передней бабке.
Рис. 10.9. Кинематическая схема токарно-винторезного станка 1А616
Движение с вала I электродвигателя (N = 4,5 кВт; n = 1440 об/мин) передается на вал II через клиноременную передачу с диаметрами шкивов 135–168 мм; на вал III – через зубчатые передачи 41–26, 39–31, 14–55. Вал III имеет три частоты вращения.
Вал III имеет три частоты вращения.
С вала III на вал IV движение передается через зубчатые передачи 14 – 44, 19 – 38, 26 – 32, 31–25. Вал IV имеет 12 частот вращения. Скорости переключаются блоками Б1, Б2, Б3 и зубчатым колесом z = 55, сидящими на валах на скользящих шпонках.
С вала IV движение клиноременной передачей с диаметрами шкивов 174–174 мм передается полому валу V, а далее через зубчатые передачи 34–68 и 20–80 – на шпиндель VII. Переключением муфты М1 влево вращение вала V передается шпинделю VII. Шпиндель станка имеет 24 частоты вращения (11–2240 об/мин).
Кинематическая цепь подачи. Цепь движения подачи суппортов станка начинается с вала VII (шпинделя). Движение с вала VII на вал X передается через реверсивный механизм зубчатыми передачами 34–44–22–34 или 34–44–44–34. Переключение колеса z = 34 на скользящей шпонке
реверсирует направление движения подач суппортов, с вала X движение передается на ведущий вал
Включением муфт М2 и М3 и переключением блоков Б5, Б6, Б7 и Б8 коробки подач движение с вала XII передается через соответствующие зубчатые передачи на ходовой валик XXI станка. Механизм коробки подач обеспечивает 48 частот вращения ходового валика. Однако вследствие близкого совпадения ряда частот вращения практически коробка подач обеспечивает только 22 частоты вращения ходового валика и, следовательно, 22 продольные или поперечные подачи.
С ходового валика XXI движение передается на вал XXII фартука станка червячной передачей 2–35. Включением муфты М6 движение передается с вала XXII через зубчатые передачи 31–53 и 27–53 на вал XXIV, на котором жестко закреплено реечное зубчатое колесо z = 14. Реечное колесо, вращаясь, катится по зубчатой рейке, привернутой к станине станка, обеспечивая продольную подачу суппорта. Включением муфты М5 движение передается с вала XXII через передачи 50 – 35 и 47 – 13 на ходовой винт XXVII поперечной подачи.
Кинематическая цепь нарезания резьбы. При нарезании резьб с шагом до 6 мм движение в коробку подач передается от шпинделя. Резьбы с более крупным шагом нарезают при включенном переборе с использованием звена увеличения шага. Для этого блок Б4 смещают вправо, пока зубчатое колесо z = 44 не войдет в зацепление с колесом z = 34, закрепленным на валу V. В этом случае движение в коробку подач передается от вала V; с вала X на вал XII коробки подач – через блоки С1 и С2 сменных зубчатых колес.
При нарезании дюймовых резьб кулачковую муфту М2 выключают. Колесо
Суппорт станка при нарезании резьб получает движение от коробки подач через кулачковую муфту M4, промежуточный валик XVIII и ходовой винт XX.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Станки – Механическое образование
перейти к содержаниюСтанки / По Сириша / 26 июня 2023 г. 11 апреля 2023 г. / Что такое коэффициент Пуассона, Что такое коэффициент Пуассона материала и как он используется в механике материалов?
Коэффициент Пуассона материала является мерой способности материала деформироваться в ответ на приложенную нагрузку. Это безразмерная величина, которая обычно обозначается символом «nu» и определяется как отношение поперечной деформации к осевой деформации в материале, когда он подвергается
Подробнее »
Станки / По Сириша / 20 июня 2023 г. 7 апреля 2023 г. / Какова взаимосвязь между напряжением и деформацией в материале
Взаимосвязь между напряжением и деформацией в материале известна как кривая напряжения-деформации, которая представляет собой графическое представление того, как материал ведет себя при возрастающем уровне стресса. Кривая напряжение-деформация обычно строится с напряжением по оси y и деформацией по оси x. В общем, кривая напряжения-деформации материала может быть
Кривая напряжение-деформация обычно строится с напряжением по оси y и деформацией по оси x. В общем, кривая напряжения-деформации материала может быть
Подробнее »
Станки / По Сириша / 9 июня 2023 г. 6 апреля 2023 г. / Различие между машиной и механизмом, что такое машина, что такое механизм
Машина — это динамическая механическая система, которая используется для передачи или преобразования механической энергии. Он состоит из взаимосвязанных элементов, таких как шестерни, кулачки, рычаги и шкивы, и предназначен для передачи или преобразования механической энергии посредством приложения сил и движений. Машины могут быть как простыми, так и сложными, и они могут
Подробнее »
Станки / По Сириша / 8 июня 2023 г. 6 апреля 2023 г. / Различие между структурой и машиной, что такое машина, что такое структура
Конструкция — это статическая механическая система, которая используется для поддержки или передачи нагрузок. Обычно он состоит из взаимосвязанных элементов, таких как балки, колонны и фермы, и предназначен для сопротивления внешним силам, таким как сила тяжести, ветер и землетрясения. Строения могут быть как построенными, так и естественными, и их можно найти
Строения могут быть как построенными, так и естественными, и их можно найти
Подробнее »
Кинематика машин, станков / по резкий / 18 марта 2023 г. 3 января 2023 г. / Примеры кинематической пары, Кинематическая пара, Типы кинематической пары, Использование кинематической пары
Кинематическая пара представляет собой комбинацию двух или более кинематических звеньев, которые используются для передачи движения или силы внутри механическая система. Кинематическая пара состоит как минимум из одного подвижного элемента и одного неподвижного элемента и характеризуется типом движения, которое она допускает между двумя элементами.
Станки / По резкий / 13 марта 2023 г. 4 января 2023 г. / модуль ударной вязкости, Что такое модуль ударной вязкости и как он используется в механике материалов
Модуль ударной вязкости, также известный как ударная вязкость или испытание на удар по Шарпи, представляет собой мера способности материала поглощать энергию, когда он подвергается ударной нагрузке.
Станки / По резкий / 9 марта, 2023 3 января 2023 г. / Различие между структурой и машиной, структурой и машиной
Основное различие между структурой и машиной заключается в типе механической системы, которую они представляют. Конструкция — это статическая система, которая используется для поддержки или передачи нагрузок, а машина — это динамическая система, которая используется для передачи или преобразования механической энергии.
Кинематика машин, станков / по резкий / 3 марта 2023 г. 3 января 2023 г. / Примеры кинематической цепи, Кинематическая цепь, Типы кинематической цепи
Кинематическая цепь представляет собой ряд взаимосвязанных кинематических звеньев, которые используются для передачи движения или силы в механической системе. Кинематическая цепь состоит из ряда взаимосвязанных звеньев, образующих замкнутый контур, где каждое звено соединено по крайней мере с одним другим звеном через шарнир.
Станки / По
резкий / 4 февраля 2023 г. 6 января 2023 г. / Разница между усталостной прочностью и пределом прочности при растяжении, усталостной прочностью, формулой усталостной прочности, усталостной прочностью по сравнению с пределом прочности, пределом прочности при растяжении, формулой предела прочности при растяжении
6 января 2023 г. / Разница между усталостной прочностью и пределом прочности при растяжении, усталостной прочностью, формулой усталостной прочности, усталостной прочностью по сравнению с пределом прочности, пределом прочности при растяжении, формулой предела прочности при растяжении
Усталостная прочность и предел прочности при растяжении — это два механических свойства материалов, которые используются для измерения их способности выдерживать различные виды нагрузок.
Станки, кинематика станков / по резкий / 27 января 2023 г. 3 января 2023 г. / Разница между статикой и кинематикой, статикой и кинематикой
Статика и кинематика — это две ветви механики, которые занимаются изучением сил и их воздействия на тела.
Программное обеспечение для анализа и моделирования кинематики
 youtube.com/embed/E4cPIwAEdfI?autoplay=1&start=0&rel=0″>
youtube.com/embed/E4cPIwAEdfI?autoplay=1&start=0&rel=0″> Обратная кинематика и прямая кинематика: проектирование механизмов и связей, анализ и моделирование.
Наше программное обеспечение для проектирования, анализа и моделирования механизмов и рычажных механизмов одинаково хорошо построит ваши механизмы с Forward-Kinematics и Инверсная кинематика . Вы просто добавляете Части, Соединения и Движения интуитивно понятным способом. Разработайте движение наиболее важного элемента механизма — обычно инструмента или рабочего органа для инверсной кинематики или кулачка или серводвигателя для прямой кинематики — MechDesigner распознает механизм и рычажное соединение и проверит их поведение. именно так, как вы хотите.
Вы можете:
- Спроектировать практически любой полезный планарный и пространственный механизм
- Добавьте столько связей и механизмов, сколько вам нужно или нужно.

- Анализ всех кинематических данных: линейное и угловое перемещение, скорость и ускорение любых частей или между ними
- Проанализируйте движение всех частей и соединений в вашем механизме, от частей, которые направляют инструменты [для инверсной кинематики], до тех, которые приводят в движение рычажный механизм [для прямой кинематики].
- Добавьте к детали линейное или угловое движение, а затем добавьте другие детали и соединения
- Проектирование параметрических плоских и пространственных перемещений [X, Y, Z]
- Создавайте плавные траектории, по которым должны следовать ваши инструменты, и создавайте движение инструментов по этому пути — вы можете редактировать траекторию и движение в любое время.
- Продолжайте добавлять детали и соединения — просто следуйте нескольким простым правилам
- Добавьте механизм к любой фиксированной или движущейся плоскости — затем вы можете добавить любое количество соединений к этой плоскости.
- Добавление большинства кинематических элементов, таких как шестерни, рейки, ремни, шкивы, пружины и инерция, для анализа сил
- И многое другое — подробности см. в разделе Возможности MechDesigner.

 в разделе Возможности MechDesigner.
в разделе Возможности MechDesigner.Вы обнаружите, что с MechDesigner вы можете быстро и эффективно моделировать и анализировать ваши механизмы и соединения, экономя ваше время, деньги и усилия.
MechDesigner быстро решает кинематику с помощью быстрых и чрезвычайно эффективных алгоритмов замкнутой формы, которые вычисляют для всех положений, скоростей и ускорений и сил для всех частей. Поскольку в MechDesigner используются быстрые алгоритмы закрытой формы, вы будете поражены тем, как быстро вы сможете вводить новшества и наблюдать, как симуляция работает на скорости, близкой к машинной.
Когда вам нужны взаимодействующие многозвенные механизмы, типичные для упаковочных машин, мы бы сказали, что инверсная кинематика – это ЕДИНСТВЕННЫЙ способ успешного проектирования механизмов.
Вы можете самостоятельно протестировать кинематический анализ и моделирование MechDesigner, просто загрузив бесплатную 30-дневную пробную версию.
Начните бесплатную пробную версию прямо сейчас
 youtube.com/embed/0E4qZyfiZqI?autoplay=0&start=240&rel=0″>
youtube.com/embed/0E4qZyfiZqI?autoplay=0&start=240&rel=0″> Программное обеспечение MechDesigner для моделирования движения, механизмов и связей может моделировать и анализировать все механические устройства и машины. Попробуйте его, прежде чем купить его с бесплатной 30-дневной пробной версией. Скачать сейчас. Легко добавляйте детали, соединения, шестерни, ремни, шкивы, пружины, стойки и многое другое. Анализируйте все кинематические и силовые данные всех деталей и соединений, а также компонентов машин.
Программное обеспечение Cam Design. Проектирование и анализ всех кулачков: в том числе бочкообразных, глобоидальных, сопряженных, цилиндрических, пластинчатых, канавочных и т. д. Бесплатная 30-дневная пробная версия. Проанализируйте расчетные параметры: угол давления, радиус кривизны, контактное усилие, контактное напряжение. Экспорт профилей кулачков для производства: файлы DXF, STEP и текстовые файлы, точки и двунаправленные дуги.
Экспорт профилей кулачков для производства: файлы DXF, STEP и текстовые файлы, точки и двунаправленные дуги.
Программное обеспечение для проектирования роботов: модели Pick & Place, SCARA, Delta, Gantry, Pantograph, Planar Guidance Mechanism Robots. Загрузите MechDesigner сегодня, чтобы получить бесплатную 30-дневную пробную версию.
Программное обеспечение для проектирования механизмов должно быть способно проектировать механизмы, а также кулачковое проектирование и проектирование движения. Вы можете спроектировать любой механизм, который может состоять только из деталей и соединений, но вы можете легко добавить сервоприводы, кулачки, шестерни [простые шестерни, рейки, конические шестерни], ремни со шкивами, все со сложными движениями. Там может быть один вход или несколько. Конструкция механизма может быть плоскостной или пространственной. Вы можете спроектировать все механизмы машины одновременно, чтобы увидеть все важные взаимодействия механизмов. Вы даже можете добавить упаковку к модели и оформить ее как механизм.
Там может быть один вход или несколько. Конструкция механизма может быть плоскостной или пространственной. Вы можете спроектировать все механизмы машины одновременно, чтобы увидеть все важные взаимодействия механизмов. Вы даже можете добавить упаковку к модели и оформить ее как механизм.
Motion Design интегрирован с MechDesigner как автономный инструмент, который мы называем MotionDeisgner. MotionDesigner — мощный редактор моушн-дизайна. Вы можете редактировать и одновременно обновлять движения конструкции механизма и конструкции кулачка в вашей модели MechDesigner — «на лету». Таким образом, вы можете тщательно изучить свой моушн-дизайн в виде графика в MotionDesigner и одновременно изучить то же самое движение в модели вашей машины в MechDesigner.
