Намоточный станок с укладчиком на шаговом двигателе
By Picap , May 3, in Автоматика. Собрал схемку в прищепке. Есть своя печатка в Lay. Заработала сразу, управление четкое, вращение двигателя самое подходящее для работы в намоточном станке!
Поиск данных по Вашему запросу:
Схемы, справочники, даташиты:
Прайс-листы, цены:
Обсуждения, статьи, мануалы:
Дождитесь окончания поиска во всех базах.
По завершению появится ссылка для доступа к найденным материалам.
Содержание:
- файл проекта станок
- намоточный станок на шаговом двигателе
- Намоточные станки: виды и характеристики
- Автоматический Намоточный станок.
- Инструкция по изготовлению намоточного станка
- Намоточный станок настольный
- www.
cncmasterkit.ru
ПОСМОТРИТЕ ВИДЕО ПО ТЕМЕ: Намоточный станок с автоматической укладкой витков
файл проекта станок
Сейчас этот форум просматривают: Google [Bot] и гости: 1. Мобильная версия FAQ. Предыдущее посещение: Сб окт 12, Текущее время: Сб окт 12, Правила форума Посмотреть правила форума. Добавлено: Сб авг 06, Где то я уже размещал фотки своего проекта намоточного станка, только найти не могу. Не беда создам новую тему. Проект я этот начал еще 4 года назад. Электронику несколько раз переделывал, не давались мне драйвера для драйверов.
Механику кое как изначально примерно заложил правильно, были переделки по мелочи. Мы рады предложить вам ее в подарок! На видео 10RPM а так раскручивал до 55 обор в мин. Чтобы больше нужно скорее всего менять шаговик А также ставить муфту поставить нормальную между шаговиком и редуктором, там есть небольшая несоостность. Добавлено: Ср авг 10, Здраствуйте ув. У меня какраз тоже стал вопрос постройки намоточного станка С механикой проблем не вижу, а вот с управлением возникли вопросы Хочу управлять от компа чтото в просторах никак не могу найти програмульку для этих целей никогда бы не подумал что с этим возникнит проблема По вашему станочку вопрос!?
Мы рады предложить вам ее в подарок! На видео 10RPM а так раскручивал до 55 обор в мин. Чтобы больше нужно скорее всего менять шаговик А также ставить муфту поставить нормальную между шаговиком и редуктором, там есть небольшая несоостность. Добавлено: Ср авг 10, Здраствуйте ув. У меня какраз тоже стал вопрос постройки намоточного станка С механикой проблем не вижу, а вот с управлением возникли вопросы Хочу управлять от компа чтото в просторах никак не могу найти програмульку для этих целей никогда бы не подумал что с этим возникнит проблема По вашему станочку вопрос!?
Уж очень медленно мотает!!! А зачем вообще редуктор? Добавлено: Чт авг 11, Мощности двигателя крайне мало, чтоб крутить напрямую. Особенно в начале намотки, когда провод для плотной укладки на квадратный каркас приходится изгибать почти под прямым углом. С проводом толще 0,8 мм всю конструкцию станочка весом 18 кг приходится прикручивать к столу, иначе елозит при намотке.
А редуктор снизит скорость намотки. По поводу управления от компа – соневаюсь, что это будет удобно. И так сейчас комп обвешан проводами как елка новогодняя, а лепить к нему еще и намоточный станок – очень геморойно. Закажите, например, кулхацкеру программку для намоточного станка, сделает быстро и станок будет автономен, хочешь – мотай на столе, хочешь – в гараже, а хочешь – на печке. И не надо будет с собой комп таскать. У меня конструкция автономная, управляется все мегой32, но заложена возможность подключения RS Эта часть будет не скоро реализована, но будет.
И так сейчас комп обвешан проводами как елка новогодняя, а лепить к нему еще и намоточный станок – очень геморойно. Закажите, например, кулхацкеру программку для намоточного станка, сделает быстро и станок будет автономен, хочешь – мотай на столе, хочешь – в гараже, а хочешь – на печке. И не надо будет с собой комп таскать. У меня конструкция автономная, управляется все мегой32, но заложена возможность подключения RS Эта часть будет не скоро реализована, но будет.
А что в ней будет реализовано пока только наметки. Редуктор и стоит чтобы повышать момент, на скорость пришлось ложить.. Да и ставить шаговый двигатель на основной вал, было ошибочным решением. В дальнейшем перейду на коллекторный, когда найду подходящий. Беда только в том чтобы хватило на все ног На данный момент реализую нормальный вод базовых параметров, и их хранение и отображения Я тоже не понимаю, зачем там графический дисплей?
Всего сообщения: “Число витков? Это же не полный автомат, который сам будет и бумагу подкладывать и провода выбирать, заправлять, выводы припаивать. При грамотном “дереве” менюх Автономный контроллер трёхосевого станка ведь пашет, и нормально. А потом гораздо эффективнее заниматься другими полезными делами, пока станок мотает. Вот добавить “БИП”ы джля озвучивания событий было бы гораздо правильней.
При грамотном “дереве” менюх Автономный контроллер трёхосевого станка ведь пашет, и нормально. А потом гораздо эффективнее заниматься другими полезными делами, пока станок мотает. Вот добавить “БИП”ы джля озвучивания событий было бы гораздо правильней.
Все сказанное ИМХО. ЗЫ Я тоже первые рельефы стоял и пялился как фреза бегает из угла в угол. А теперь поставил пилить и на работу уехал или другими делами занялся. Прсто что 16х2 мало, вызывает сомнения:. Все что вы огласили, безусловно верное,все зависит от необходимости и надобности Пиполка БИП заложен. Добавлено: Пт авг 12, Зачем тогда эта тема если тут все все пишут и делают сами!!! Я думаю что нужно рассмотреть разные варианты и сделать удачную конструкцию, а если писать здесь ради того чтобы восхищались или критиковали мысли одного автора то в этом нет никакого смысла Для кого то нет никаких проблем прошить контроллер, а для меня нет проблем сделать механику И то что сейчас у автора это не механика, а просто испытательный стенд в котором еще все придется переделывать Понимаете, у каждой конструкции есть автор и если вы не хотите наслушаться сплетен об этой конструкции и искаженного восприятия принципов ее работы, устройства, то спросите что вам нужно именно у автора на его форуме в его теме, а не на форумах, не имеющих по большому счету к автору и конструкции никакого отношения.
Вам сейчас найдут массу недостатков этой и кучу достоинств других конструкций. Но лучше спросите автора, он знает о своем детище все и гораздо лучше чем другие.! Скажу иначе Есть тема “Намоточный станок” И есть высказывания человека, который оставил 5 сообщений на форуме. Самое смачное и обильное из них – ни о чём. Делаю предупреждение Добавлено: Вс авг 14, Делаю свое, другие конструкции посмотрел и выбрал из них на мой взгляд лучшее. Те кто хотят повторить, пускай повторяют и спрашивают, это не патент От управление с компа в свое время отказался, по той причине что у меня ноут, и когда закладывал конструкцию у меня уже LPT порта небыло, а USB-RS FT микросхем были редки и цена была не сладкая.
Заголовок сообщения: Re: Намоточный станок. Добавлено: Вс сен 11, Редко провожу эксперименты с укладчиком Возникла проблема, что иногда витки перехлестываются. Переделал сам укладчик. Добавлено: Сб окт 22, Было время попробовать намотать обмотку трансформатора “Вот что вышло”. Первый слой Бывают и огрехи Натяжитель.
Заголовок сообщения: Добавлено: Ср авг 10, Заголовок сообщения: Добавлено: Чт авг 11, Цитата: Беда только в том чтобы хватило на все ног Регистры никто не отменял. Цитата: На данный момент реализую нормальный вод базовых параметров, и их хранение и отображения Они и будут скорее всего использоваться. Когда закладывал все это, только начинал дружить со всем этим, в процессе разработки растем. Меню и сделано грамотно.. Мне мало, я люблю информативность, чтобы отображалось все что нужно и не нужно Trudogolik писал а : Всего сообщения: “Число витков?
По мне не очень информативно. Да тоже меню на 2х строчках не очень отображается. Для меня будет информативно как миним чтобы отображалось: диаметр провода кол.
Цитата: от необходимости и надобности Как-то так:. Заголовок сообщения: Добавлено: Пт авг 12, Заголовок сообщения: Добавлено: Вс авг 14, Заголовок сообщения: Re: Намоточный станок Добавлено: Вс сен 11, Процесс тестирование и наладки, написания софтины продалжается а также проблема времени
намоточный станок на шаговом двигателе
Тема в разделе ” Закажу проект “, создана пользователем VitalikST , 31 янв Войти или зарегистрироваться. Искать только в заголовках Сообщения пользователя: Имена участников разделяйте запятой. Новее чем: Искать только в этой теме Искать только в этом разделе Отображать результаты в виде тем. Быстрый поиск. Автоматический Намоточный станок. Метки: реле шаговый мотор.
Искать только в заголовках Сообщения пользователя: Имена участников разделяйте запятой. Новее чем: Искать только в этой теме Искать только в этом разделе Отображать результаты в виде тем. Быстрый поиск. Автоматический Намоточный станок. Метки: реле шаговый мотор.
Ну и нужна схема рабочая с печатками под эти микроконтроллеры с укладчиком на шаговом двигателе и основным мотором.
Намоточные станки: виды и характеристики
Добро пожаловать, Гость. Логин: Пароль: Запомнить меня. Забыли пароль? Забыли логин? Намоточный станок с укладчиком на шаговом двигателе. ТЕМА: Намоточный станок с укладчиком на шаговом двигателе. Пользовался я мини- моталкой времен СССР. А на малых оборотах мотать очень долго.
Автоматический Намоточный станок.
Намоточный станок своими руками Максим Лапицкий Намоточный станок предназначен для намотки провода диаметром от 0,09 до 0,5 мм виток к витку или с заданным шагом. Наибольшая длина ряда …. Электронный счетчик количества оборотов возможно установить на любой намоточный станок предназначенный для намотки импульсных трансформаторов и катушек.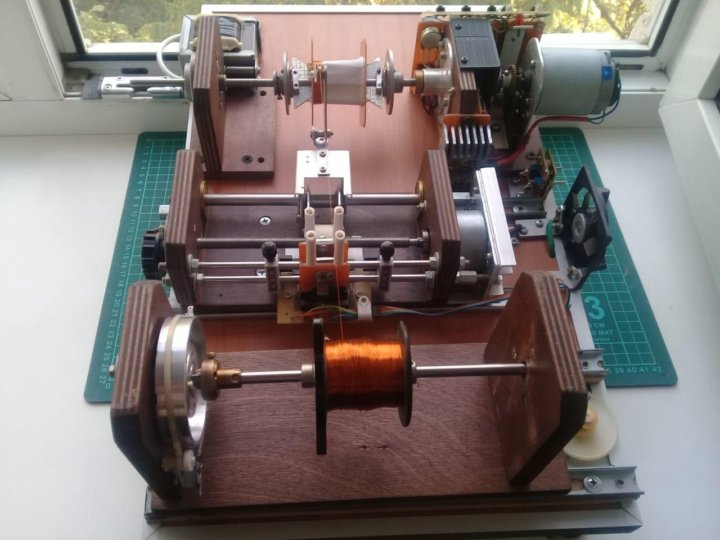 Намоточный станок незаменим при производстве однотипных изделий.
Намоточный станок незаменим при производстве однотипных изделий.
Что касается схемы управления, то были приняты самые простые меры для реализации поставленной задачи. Жмм кнопку СТАРТ, на самом первом индикаторе загорается маленький квадратик и программа переходит в следующий этап работы, где контроллер ждт сигнала от.
Инструкция по изготовлению намоточного станка
Как оставлять свои сообщения Предупреждение и вечный бан для постоянных нарушителей. Клуб DiyAudio Звук в твоих руках! Добро пожаловать, Гость. Пожалуйста, войдите или зарегистрируйтесь. Страницы:
Намоточный станок настольный
Вернуться в Прочие станки. Translate using Google:. Намоточные, сверлильные, электроэррозионные и другие станки с ЧПУ. Создание намоточного станка для катушек. Появилась необходимость в сборке станка для намотки катушек и трансформаторов. Для этих целей был приобретён униполярный шаговый двигатель ПБМГ от пятидюймового дисковода, дабы использовать его в качестве раскладчика витков.![]() С управляющей программой и электроникой вопросов не возникает, однако механика вгоняет в ступор. Обшарив интернет в поиске подходящей конструкции, присмотрелся к одному видео ссылку размещу ниже.
С управляющей программой и электроникой вопросов не возникает, однако механика вгоняет в ступор. Обшарив интернет в поиске подходящей конструкции, присмотрелся к одному видео ссылку размещу ниже.
Автоматический Намоточный станок. стоит двигатель с редуктором включается с помощью реле, на двигателе стоит геркон который считает оборты, кнопка запуска Возврат каретки укладчика в 0 позицию. 3.
www.cncmasterkit.ru
Конструкция самодельного намоточного станка с программой и описанием схемотехники Статья “Намоточный станок на Arduino” на cxem. Контроллер намоточного станка Evgeniy электронные поделки и не только Намоточный станок с автоматической укладкой витков Mihail Polunin.
Новокузнецк, Кемеровская обл. Логин: Пароль Забыли? Намоточный станок с проводоукладчиком. Практика Секреты самодельщика. Сергей Pagan. Список всех статей.
Привет, Гость! Войдите или зарегистрируйтесь.
Сейчас этот форум просматривают: Google [Bot] и гости: 1. Мобильная версия FAQ. Предыдущее посещение: Сб окт 12, Текущее время: Сб окт 12, Правила форума Посмотреть правила форума.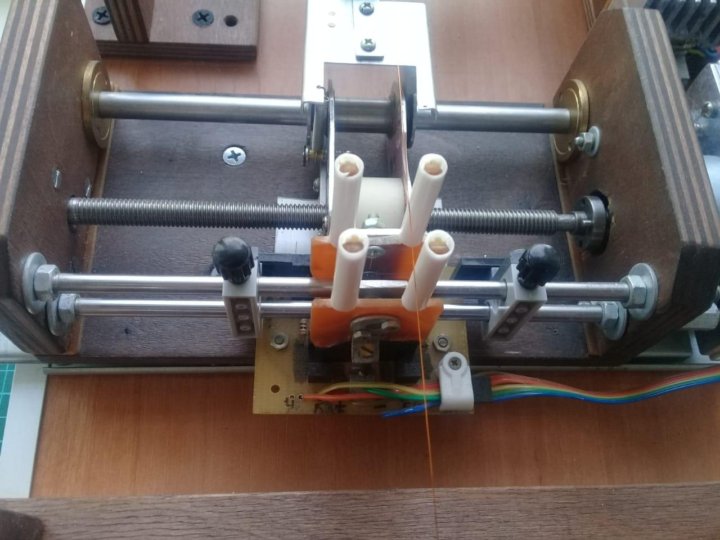
Некоторые важные части электротехнических и электронных схем, такие как дроссели, всевозможные трансформаторы и многие другие многовитковые элементы электромагнитного действия невозможно изготовить без специального оборудования — станков для намотки проволоки на катушки. Эти устройства выполняют обмотки изолированными проводами на ферримагнитные и ферритовые сердечники, а уже с их помощью изготавливаются статоры электродвигателей, любые трансформаторы и просто катушки индуктивности. В наше время потребность в намоточных станках только увеличивается, так как ход технического прогресса человеческого общества неуклонно ускоряется.
Намоточный станок с проводоукладчиком » Журнал практической электроники Датагор
Давно была идея о создании намоточного станка с проводоукладчиком. На просторах Интернета много всего отыскать можно, но всегда встречался с какой-то трудностью по его реализации. И вот азарт достиг «точки кипения» и началась работа.
И вот азарт достиг «точки кипения» и началась работа.
Достал старый принтер, сканер и все, что только под руку попалось…
Содержание / Contents
Камрад, рассмотри датагорские рекомендации
🌼 Полезные и проверенные железяки, можно брать
Опробовано в лаборатории редакции или читателями.
Трансформатор R-core 30Ватт 2 x 6V 9V 12V 15V 18V 24V 30V
Паяльная станция 80W SUGON T26, жала и ручки JBC!
Отличная прочная сумочка для инструмента и мелочей
Хороший кабель Display Port для монитора, DP1.4
Конденсаторы WIMA MKP2 полипропилен
Трансформатор-тор 30 Ватт, 12V 15V 18V 24V 28V 30V 36V
SN-390 Держатель для удобной пайки печатных плат
Панельки для электронных ламп 8 пин, керамика
Сначала нужно продумать механическую часть. А что тут думать, вот каретка от принтера прекрасно двигается, почему её не использовать? Вырезав все не нужное и оставив только станину с осью и кареткой. Все прекрасно, но её двигает коллекторный двигатель, а управление через энкодерную ленту и ШИМ я не сделаю, нужно что-то придумать на шаговом двигателе.
А что тут думать, вот каретка от принтера прекрасно двигается, почему её не использовать? Вырезав все не нужное и оставив только станину с осью и кареткой. Все прекрасно, но её двигает коллекторный двигатель, а управление через энкодерную ленту и ШИМ я не сделаю, нужно что-то придумать на шаговом двигателе.
Смотрю на сканер и вот оно чудо, там лампу перемещает шаговый двигатель, да ещё и редуктор есть. Берём этот редуктор с мотором и крепим на станину от принтера. Пересчитав какое расстояние проделает каретка за 1 шаг двигателя задался константой А = 0,02 мм.
В качестве самого проводоукладчика использовал диск от старого винчестера, предварительно вырезав от него ј-сектора чтобы нормально стал на каретку. Провод будет проходить через систему роликов, которые были любезно откручены от сканера и припаяны на винчестерный диск.
Всё, проводоукладчик готов.
Что касается схемы управления, то были приняты самые простые меры для реализации поставленной задачи. Благо, драйвер для биполярного шагового двигателя это не проблема, в Сети много вариантов. Выбрал простой на микросхемах L297 и L298.
Благо, драйвер для биполярного шагового двигателя это не проблема, в Сети много вариантов. Выбрал простой на микросхемах L297 и L298.
Понял, что обойтись без микроконтроллера будет трудно и на некоторых форумах мне дали совет самому подучить программирование и написать программу, ибо никто не будет на энтузиазме мне её писать. Так и сделал. Прошу не пинать ногами, ибо это первая моя программа для МК.
Контроллер выбрал АТмега8, таких контроллеров полно и достать не проблема.
Опишу алгоритм работы программы, каким я для себя видел.
Включаем контроллер и на семисегментном индикаторе горят «0,00» нули. С помощью кнопок «+1» и «-1» выставляем значение диаметра провода (например 0,31) и жмём кнопку «СТАРТ».
Контроллер, исходя из выше изложенной константы «А = 0,02», делает пересчёт сколько импульсов ему нужно подавать на драйвер шагового двигателя для его перемещения на расстояние 0,31 мм. Т.е. 0,31/0,02 = 15,5 импульсов. Так как число импульсов должно быть целое число контроллер выдаёт 16 импульсов (или 15). Погрешность есть, куда без неё.
Т.е. 0,31/0,02 = 15,5 импульсов. Так как число импульсов должно быть целое число контроллер выдаёт 16 импульсов (или 15). Погрешность есть, куда без неё.
Жмём кнопку «СТАРТ», на самом первом индикаторе загорается маленький квадратик и программа переходит в следующий этап работы, где контроллер ждёт сигнала от датчика, который будет на оси с катушкой, для разрешения выдать пачку импульсов для шагового двигателя. Вот он получает импульс и МК выдаёт пачку импульсов. Каретка проводоукладчика перемещается и ждёт следующего разрешающего импульса.
Если в процессе работы нужно подкорректировать диаметр провода и вернутся в первую часть программы, нужно нажать «СТАРТ», квадратик исчезнет и можно изменять значение диаметра провода. Одно замечание: чтобы была возможность контроллеру отреагировать на кнопку «СТАРТ», диск датчика на основной оси должен быть на чёрном сегменте, т. е. на контроллер от датчика должен подаваться уровень «лог. 1».
С прерываниями работать ещё не научился и сделал, как умею. Диск датчика расчертил на 4 части и черным лаком закрасил сегменты напротив, в шахматном порядке. Поскольку на диске будет 2 черных сектора — контроллер будет реагировать на каждые 180 градусов оборота оси, и соответственно будет на каждые 180 градусов перемещать каретку на Ѕ диаметра провода. В таком случае минимальный шаг намотки (в моем случае) =0,04 мм. Программа работает под внутренним тактированием с частотой 1 МГц.
Диск датчика расчертил на 4 части и черным лаком закрасил сегменты напротив, в шахматном порядке. Поскольку на диске будет 2 черных сектора — контроллер будет реагировать на каждые 180 градусов оборота оси, и соответственно будет на каждые 180 градусов перемещать каретку на Ѕ диаметра провода. В таком случае минимальный шаг намотки (в моем случае) =0,04 мм. Программа работает под внутренним тактированием с частотой 1 МГц.
Уже опробовал станок в намотке проводом 0,315 (мотал выходной трансформатор для гитарного усилителя на каркасе от ОСМ-0,16). Качеством намотки и работой доволен.
Надеюсь, моя статья поможет кому-то. С развитием автоматизации думаю о добавлении двигателя на основную ось и об обновлении программки для управлением вторым шаговым двигателем.
Автоматизация — двигатель лени!
🎁Схема, плата, прошивка в hex, исходник на C
65.48 Kb ⇣ 19
🎁Всё остальное — исходники, файлы для Proteus и пр.
3. 45 Mb ⇣ 33
45 Mb ⇣ 33
Спасибо за внимание!
05.07.21 изменил Datagor. Дополнена статья по запросам камрадов. Опубликованы исходники и готовый hex.
DIY-MINI-BLDC-мотор-моталка | Hackaday.io
Посмотреть галерею
Команда (1)
- Инновационный
Этот проект был создано 25.05.2022 и последнее обновление 6 месяцев назад.
Детали
Привет, друзья, я сделал мини-машину для намотки статора с использованием Arduino, это всего лишь прототип, эта машина не является точной.![]() Это просто дает нам представление о том, как может работать машина для намотки статора. В этом проекте я использовал два шаговых двигателя, один из которых используется для вращения проволочного рычага, а другой — для вращения статора. Медная проволока выходила из полой трубки, и при вращении проволочного рычага она наматывалась на полюс. чередующиеся полюсные обмотки по часовой стрелке и против часовой стрелки соответственно. Я добавил возвратно-поступательный механизм вне камеры, это поможет намотать катушку с некоторой шириной, иначе рука будет наматывать катушку в одной точке.
Это просто дает нам представление о том, как может работать машина для намотки статора. В этом проекте я использовал два шаговых двигателя, один из которых используется для вращения проволочного рычага, а другой — для вращения статора. Медная проволока выходила из полой трубки, и при вращении проволочного рычага она наматывалась на полюс. чередующиеся полюсные обмотки по часовой стрелке и против часовой стрелки соответственно. Я добавил возвратно-поступательный механизм вне камеры, это поможет намотать катушку с некоторой шириной, иначе рука будет наматывать катушку в одной точке.
ИСПОЛЬЗУЕМЫЙ КОМПОНЕНТ
Шаговый драйвер Arduino Nano A4988 2 шаговых двигателя Nemw 17 Детали, напечатанные на 3D-принтере Полая трубка с наружным диаметром 5 мм, медная проволока, ремень привода ГРМ, шкив ГРМ Nextion HMI
ПРОЦЕДУРА
Первый из сделанных мной деревянных станков лист. его деревянный лист толщиной 12 мм размер основного листа составляет 100 x 250 мм. Я использовал электролобзик, чтобы разрезать деревянный лист, и, наконец, я добавил 4 резиновые ножки к нижней части станка
Я использовал электролобзик, чтобы разрезать деревянный лист, и, наконец, я добавил 4 резиновые ножки к нижней части станка
Затем я напечатал на 3D-принтере несколько деталей для удержания подшипника, и эта часть будет закреплена спереди и сзади шагового двигателя. Для печати этой детали я использовал белую нить PLA с 20-процентным заполнением.
Теперь я привожу один шаговый двигатель NEMA 17 со следующими характеристиками:
Угол шага: 1,8 ° Ток: 1,2 А/фаза Удерживающий крутящий момент: 4,2 кг-см Момент фиксации: 2,2 Н·см (максимум) Провода: 4 Диаметр вала : 5 мм
Я поместил держатель подшипника, напечатанный на 3D-принтере, спереди и сзади шагового двигателя
Теперь я приношу полую трубку из нержавеющей стали с наружным диаметром 5 мм. Это одна из наиболее важных частей машины. Медный провод проходит через эту трубку и наматывается на стержень. шлифовальный станок и отполировал его с помощью моего мини-токарного станка
Теперь я собираю узел трубы, как показано на рисунке. Сначала я поместил зубчатый шкив на вал шагового двигателя, а также поместил один другой зубчатый шкив на полую трубку и соединил оба шкива с помощью зубчатого ремня с замкнутым контуром таким образом, когда шаговый двигатель вращает трубку. повернуть
Сначала я поместил зубчатый шкив на вал шагового двигателя, а также поместил один другой зубчатый шкив на полую трубку и соединил оба шкива с помощью зубчатого ремня с замкнутым контуром таким образом, когда шаговый двигатель вращает трубку. повернуть
Я использовал свою многоцелевую печатную плату для проекта станка для резки катушек резисторов на базе Arduino. Если вы хотите получить эту печатную плату, пожалуйста, найдите файл Gerber по ссылке ниже, чтобы вы могли заказать свою собственную печатную плату. Я предлагаю вам JLCPCB.COM выбрать производителя вашей печатной платы, у них действительно очень хороший сервис и низкая цена. Ссылка на многоцелевую печатную плату https:/ /oshwlab.com/sharmaz747/multipurpose-pcb
Создание таких проектов без печатной платы — кошмар, да, поверьте мне, вы не сможете получить желаемый результат и профессиональный подход в своем проекте, если будете игнорировать печатную плату. разработал свою многоцелевую печатную плату. Эта печатная плата используется для создания широкого спектра проектов Arduino 9
Эта печатная плата используется для создания широкого спектра проектов Arduino 9
Список компонентов, которые можно подключить к печатной плате
- 2 двигателя постоянного тока (от 9 до 24 В постоянного тока)
- 2 потенциометра
- 2 серводвигателя (от 5 до 9 В постоянного тока)
- , Модуль связи, RX, TX)
- 1 Энкодер (2 контакта прерывания и 1 контакт PB)
- 1 Устройство I2C (устройство SCL/SDA, дисплей, MPU6050 и т. д.)
- 2 шаговых двигателя
У меня есть конструкция схема и печатная плата в easyEDA и заказанная печатная плата в JLCPCB
Это ссылка на редактируемый файл печатной платы
Если вам срочно нужна качественная печатная плата, вам обязательно нужно попробовать услуги по производству печатных плат JLCPCB.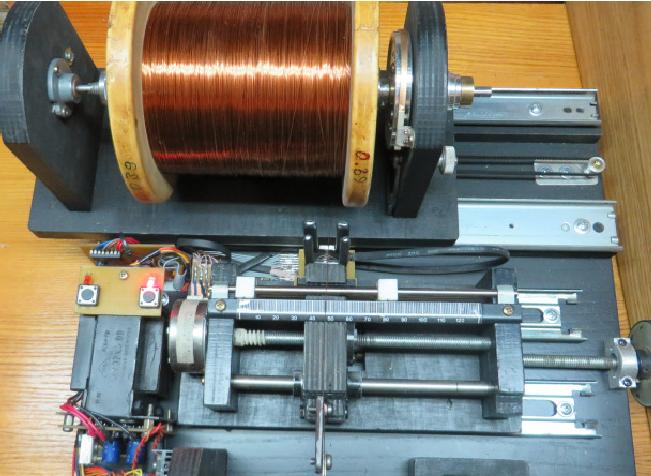 У них есть специальное предложение в размере 2 долларов США за 1-4-слойные печатные платы, ежемесячная бесплатная сборка SMT. Если вы зарегистрируетесь сегодня на JLCPCB, вы получите купоны на сумму 30 $ от JLCPCB.
У них есть специальное предложение в размере 2 долларов США за 1-4-слойные печатные платы, ежемесячная бесплатная сборка SMT. Если вы зарегистрируетесь сегодня на JLCPCB, вы получите купоны на сумму 30 $ от JLCPCB.
Монтажная служба SMT…
Подробнее »
Посмотреть все детали
Нравится этот проект?
ДелитьсяНедорогая технология намотки нити для университетских лабораторий и стартапов
1. Петерс С.Т., редактор. Композитная обмотка. АСМ Интернэшнл; Materials Park, OH, USA: 2011. [Google Scholar]
2. Frketic J., Dickens T., Ramakrishnan S. Автоматизированное производство и обработка армированных волокном полимерных (FRP) композитов: аддитивный обзор современных и современных технологий. для производства передовых материалов. Доп. Произв. 2017;14:69–86. doi: 10.1016/j.addma.2017.01.003. [Перекрестная ссылка] [Академия Google]
doi: 10.1016/j.addma.2017.01.003. [Перекрестная ссылка] [Академия Google]
3. Басслер Дж. Ракетная группа Университета штата Колорадо строит фюзеляж новой конструкции ракеты с использованием оборудования для намотки нитей, предоставленного Prodigm, Lattice Composites Resins и Composites One Carbon Fibers. Уточнить Пласт. 2020; 64: 92–96. doi: 10.1016/j.repl.2019.07.003. [CrossRef] [Google Scholar]
4. Barros B., Oliveira L., Nunes J.P. Разработка лабораторного роботизированного оборудования для намотки нити; Материалы Международной конференции PMI 2014 по инновациям в области полимеров и пресс-форм; Гимарайнш, Португалия. 10–12 сентября 2014 г. [Google Scholar]
5. Атеба Дж. А., Верчери Г., Айваззаде С. 5-осевая намоточная машина с программным управлением. науч. англ. Композиции Матер. 2004; 11: 259–266. doi: 10.1515/SECM.2004.11.4.259. [CrossRef] [Google Scholar]
6. Табучи Д., Садзима Т., Дои Т., Оникура Х., Ониши О., Курокава С., Миура Т. Разработка намоточной машины на основе внутреннего нагрева высокотемпературная жидкость для композитных сосудов.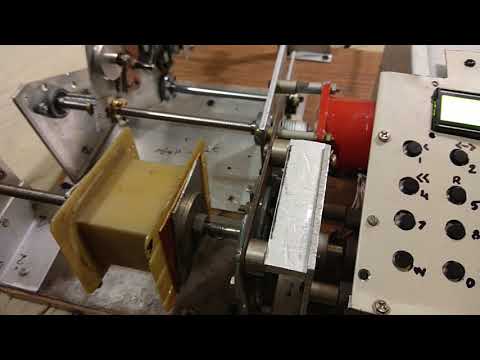 Sens. Mater. 2011; 23:347–358. doi: 10.18494/sam.2011.740. [Перекрестная ссылка] [Академия Google]
Sens. Mater. 2011; 23:347–358. doi: 10.18494/sam.2011.740. [Перекрестная ссылка] [Академия Google]
7. Шоттон-Гейл Н., Харрис Д., Пандита С.Д., Пэджет М.А., Аллен Дж.А., Фернандо Г.Ф. Управление, переработка и повторное использование композитных отходов. Эльзевир; Амстердам, Нидерланды: 2010 г. Чистая и безвредная для окружающей среды намотка мокрой нитью; стр. 331–368. [Google Scholar]
8. Пандита С.Д., Ирфан М.С., МакХаварам В.Р., Шоттон-Гейл Н., Махендран Р.С., Уэйт К.Ф., Пэджет М.А., Харрис Д., Лик С., Фернандо Г.Ф. Чистая намотка с мокрой нитью, часть 1: концепция проекта и моделирование. Дж. Компос. Матер. 2013;47:379–390. doi: 10.1177/0021998312440474. [CrossRef] [Google Scholar]
9. Хак С.А., Миддлтон В., Оуэн М.Дж. Требования к контроллеру намотки накала и решение B-Spline. Матер. Произв. Процесс. 1995; 10: 65–73. doi: 10.1080/10426919508934999. [CrossRef] [Google Scholar]
Structural CNT Composptes Часть I: Разработка намотки нити из углеродных нанотрубок; Материалы 30-й технической конференции Американского общества композитов; Ист-Лансинг, Калифорния, США. 28–30 сентября 2015 г. [Google Scholar]
28–30 сентября 2015 г. [Google Scholar]
11. Хата Т., Умемура К., Ямаути Х., Накаяма А., Каваи С., Сасаки Х. Проектирование и опытное производство «спиральной намоточной машины» для производства цилиндрических ламинированных пиломатериалов из шпона. Дж. Вуд Науч. 2001; 47: 115–123. doi: 10.1007/BF00780559. [CrossRef] [Google Scholar]
12. Lye S.W., Boey F.Y.C. Разработка недорогого прототипа системы намотки накала для композитных компонентов. Дж. Матер. Процесс. Технол. 1995; 52: 570–584. doi: 10.1016/0924-0136(94)01625-B. [Перекрестная ссылка] [Академия Google]
13. Абдалла Ф.Х., Муташер С.А., Халид Ю.А., Сапуан С.М., Хамуда А.М.С., Сахари Б.Б., Хамдан М.М. Проектирование и изготовление недорогой машины для намотки нити. Матер. Дес. 2007; 28: 234–239. doi: 10.1016/j.matdes.2005.06.015. [CrossRef] [Google Scholar]
14. Матин М.А., Шанкар Д.В.Р., Хуссейн М.М. Проектирование и разработка недорогой двухосевой намоточной машины. Дж. Адв. Произв. Технол. 2018;12:117–126.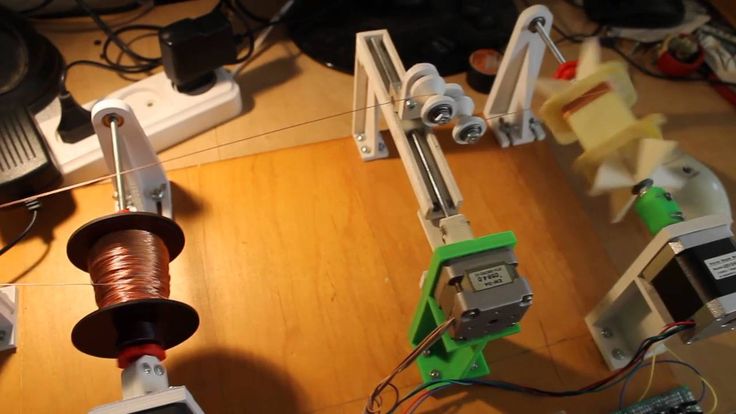 [Google Scholar]
[Google Scholar]
15. Кришнамурти Т.Н., Идкан М. Изготовление дешевой намоточной машины. Междунар. J. Последние тенденции Электр. Электрон. англ. 2014; 4:30–39. [Google Scholar]
16. Муташер С., Мир-Насири Н., Лин Л.К. Малогабаритная намоточная машина для производства изделий из волокнистых композитов. Дж. Инж. науч. Технол. 2012;7:156–168. [Google Scholar]
17. Реджаб М.Р.М., Кадиргама К., Нур М.М., Сани М.С.М., Дауд Р. Модификация и испытания четырехосевой намоточной машины; Материалы Международной конференции по науке и технологиям: применение в промышленности и образовании; Сингапур. 29 августа – 2 сентября 2008 г.; стр. 1505–1509.. [Google Scholar]
18. Узунер С., Аккус Н., Капланоглу Э. Проектирование и управление трехосевой намоточной машиной с использованием LabVIEW; Труды Ulusal Konya Ereğli Kemal Akman Meslek Yüksekokulu Tebliğ Günleri; Конья, Турция. 13–14 мая 2010 г.; [(по состоянию на 20 января 2022 г.)]. Доступно в Интернете: https://scholar.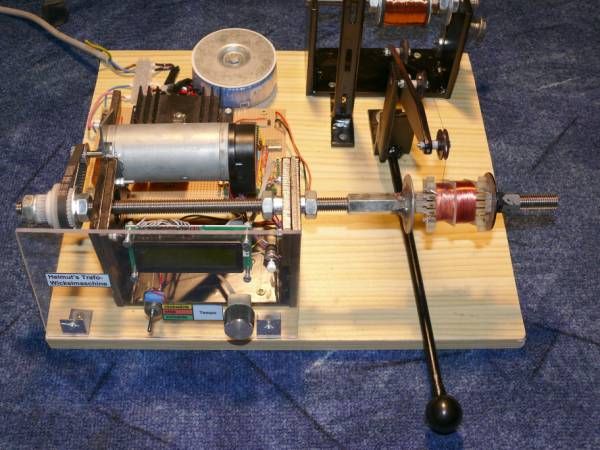 google.ca/citations?view_op=view_citation&hl=en&user=mHA0yAIAAAAJ&citation_for_view=mHA0yAIAAAAJ:9yKSN-GCB0IC [Google Scholar]
google.ca/citations?view_op=view_citation&hl=en&user=mHA0yAIAAAAJ&citation_for_view=mHA0yAIAAAAJ:9yKSN-GCB0IC [Google Scholar]
19. Quanjin M., Rejab M.R.M., Idris M.S., Bachtiar B., Сирегар Дж.П., Харит М.Н. Проектирование и оптимизация 3-осевой намоточной машины; Материалы серии конференций IOP: Материаловедение и инженерия; Пусан, Корея. 25–27 августа 2017 г. [Google Scholar]
20. Цюаньджин М., Реджаб М.Р.М., Сахат И.М., Амируддин М., Бахтиар Д., Сирегар Дж.П., Ибрагим М.И. Проект портативной 3-осевой намоточной машины с недорогой системой управления. Дж. Мех. англ. науч. 2018;12:3479–3493. doi: 10.15282/jmes.12.1.2018.15.0309. [CrossRef] [Google Scholar]
21. Quanjin M., Rejab M.R.M., Idris M.S., Zhang B., Merzuki M.N.M., Kumar N.M. Беспроводная технология, применяемая в 3-осевой системе управления намоточной машиной с использованием изобретателя приложения MIT; Материалы серии конференций IOP: Материаловедение и инженерия; Казимеж-Дольны, Польша. 21–23 ноября 2019 г.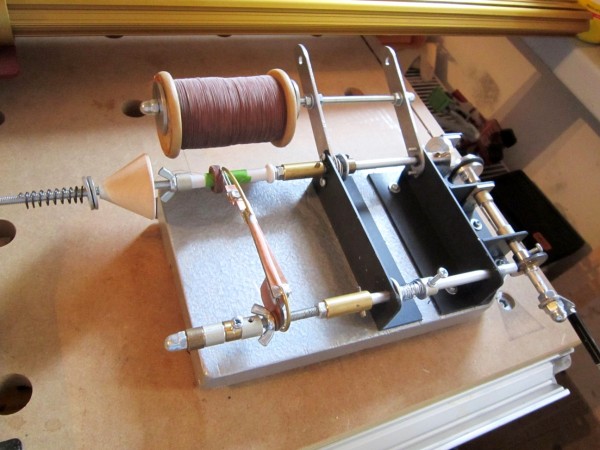 . [Google Scholar]
. [Google Scholar]
22. Цюаньджин М., Реджаб М.Р.М., Кумар Н.М., Идрис М.С. Экспериментальная оценка производительности 3-осевой намоточной машины. Результаты инж. 2019;2:100017. doi: 10.1016/j.rineng.2019.100017. [CrossRef] [Google Scholar]
23. Quanjin M., Rejab M.R.M., Kaige J., Idris M.S., Harith M.N. Метод намотки нити, эксперимент и анализ моделирования трубчатой конструкции; Материалы серии конференций IOP: Материаловедение и инженерия; Владивосток, Россия. 2–4 октября 2018 г. [Google Scholar]
24. Хант С.Дж., Висном М.Р., Вудс Б.К.С. Проектирование, изготовление и испытания автоматизированной намоточной машины для составных стержневых конструкций навивки; Материалы Европейской конференции по композитным материалам ECCM 2018-18; Афины, Греция. 24–28 июня 2020 г. [Google Scholar]
25. Хант С.Дж., Висном М.Р., Вудс Б.К.С. Композитные ферменные конструкции WrapToR: улучшенная эффективность процесса и конструкции. Композиции Структура 2019;230:111467. doi: 10.1016/j.compstruct.2019.111467. [Перекрестная ссылка] [Академия Google]
doi: 10.1016/j.compstruct.2019.111467. [Перекрестная ссылка] [Академия Google]
26. Lv Y., Zhang W., Deng H., Ding X. Конструкция малогабаритной машины для намотки нити; Материалы Международной конференции IEEE по робототехнике и биомиметике 2018 г., ROBIO 2018; Куала Лумпур, Малайзия. 12–15 декабря 2018 г. [Google Scholar]
27. Софи Т., Нойнкирхен С., Шледевски Р. Расчет траектории, технология и возможности сухой намотки волокна: обзор. Доп. Произв. Полим. Композиции науч. 2018; 4:57–72. doi: 10.1080/20550340.2018.1500099. [Перекрестная ссылка] [Академия Google]
28. Zu L., Xu H., Jia X., Zhang Q., Wang H., Zhang B. Проектирование пути намотки на основе обновлений профиля оправки композитных сосудов под давлением. Композиции Структура 2020;235:111766. doi: 10.1016/j.compstruct.2019.111766. [CrossRef] [Google Scholar]
29. Мазумдар С.К., Хоа С.В. Аналитические модели для недорогостоящего производства композитных компонентов путем намотки нитью, часть I: прямая кинематика. Дж. Компос. Матер. 1995; 29: 1515–1541. doi: 10.1177/002199839502
Дж. Компос. Матер. 1995; 29: 1515–1541. doi: 10.1177/002199839502
6. [Перекрестная ссылка] [Академия Google]
30. Куссиос С. Намотка нитей: единый подход. Издательство Делфтского университета; Делфт, Нидерланды: 2004. [Google Scholar]
31. Абдель-Хади Ф. Намотка накала революционных конструкций. Дж. Рейнф. Пласт. Композиции 2005; 24:855–868. doi: 10.1177/0731684405047772. [CrossRef] [Google Scholar]
32. Куссиос С., Бергсма О.К., Бьюкерс А. Намотка накала. Часть 2: Общая кинематическая модель и ее решения. Композиции Часть А Прил. науч. Произв. 2004; 35: 197–212. doi: 10.1016/j.compositesa.2003.10.004. [Перекрестная ссылка] [Академия Google]
33. Андрианов А., Шинкаренко О., Бертольди А.Е.М., Барселуш М.Н.Д., Верас С.А.Г. Концепция и конструкция гибридного двигателя-испытателя для отработки пропульсивного замедлителя спускаемой капсулы SARA; Материалы 51-й совместной конференции AIAA/SAE/ASEE по двигателям; Орландо, Флорида, США. 27–29 июля 2015 г. [Google Scholar]
27–29 июля 2015 г. [Google Scholar]
34. Аношкин А.Н. Формование изделий из композиционных материалов навивкой. Часть 1: Теоретические аспекты и формулы. Пермский национальный исследовательский политехнический университет; Пермь, Россия: 1994. [Google Scholar]
35. Комков М.А., Тарасов В.А. Технология намотки композиционных конструкций для ракет и вооружений. МГТУ им. Баумана; Москва, Россия: 2011. [Google Scholar]
36. Минш Н., Херрманн Ф.Х., Гереке Т., Нокке А., Шериф С. Анализ процессов намотки и перспективных технологий оборудования. Процедура ЦИРП. 2017;66:125–130. doi: 10.1016/j.procir.2017.03.284. [CrossRef] [Google Scholar]
37. Справочник по конструкционным материалам ECSS-E-HB-32-20 — Часть 3: Передача нагрузки и проектирование соединений и проектирование конструкций. Секретариат ECSS, ESA-ESTEC, Отдел требований и стандартов; Нордвейк, Нидерланды: 2011. [Google Scholar]
38. Манро М. Обзор производства компонентов из волокнистого композита методом намотки.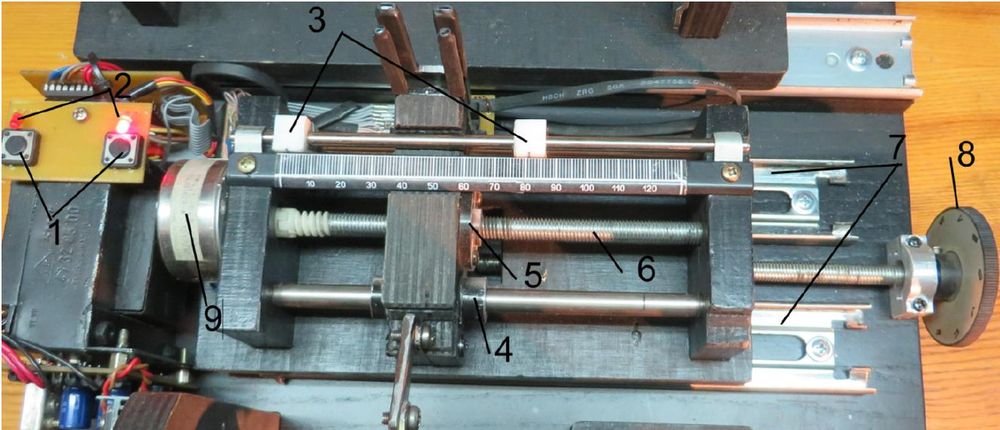 Полим. Композиции 1988; 9: 352–359. doi: 10.1002/pc.750090508. [CrossRef] [Google Scholar]
Полим. Композиции 1988; 9: 352–359. doi: 10.1002/pc.750090508. [CrossRef] [Google Scholar]
39. Марков Л., Ченг Р.М.Х. Концептуальный проект роботизированных комплексов намотки нити. Мехатроника. 1996; 6: 881–896. doi: 10.1016/S0957-4158(96)00032-3. [CrossRef] [Google Scholar]
40. Дионоро Г., Пиллони М.Т., Романо Д. Технологические инновации в производстве композитов путем намотки нитей: управленческая оценка; Труды высокоэффективных структур и материалов; Лиссабон, Португалия. 11–13 июля 2022 г. [Google Scholar]
41. Романо Д., Педоне П. Экономическая оценка инновационного процесса производства в технологии намотки нити; Материалы 9-го QMOD; Ливерпуль, Великобритания. 8–10 августа 2006 г. [Google Scholar]
42. Koussios S., Beukers A. Wiley Encyclopedia of Composites. Джон Уайли и сыновья, инк.; Хобокен, Нью-Джерси, США: 2012. Намотка накала: дизайн, материалы, конструкции и производственный процесс; стр. 1–16. [CrossRef] [Google Scholar]
43. Петерс С.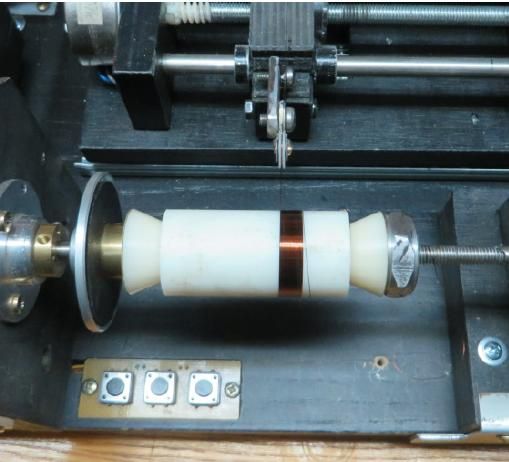 Т., Тарнопольский Ю.М. Справочник по композитам. Марсель Деккер; Нью-Йорк, штат Нью-Йорк, США: 1997. Накальная обмотка; стр. 515–548. [Google Scholar]
Т., Тарнопольский Ю.М. Справочник по композитам. Марсель Деккер; Нью-Йорк, штат Нью-Йорк, США: 1997. Накальная обмотка; стр. 515–548. [Google Scholar]
44. Питерс С.Т., Форал Р.Ф., Хамфри В.Д. Справочник по композитной арматуре. Wiley-ВЧ; Пало-Альто, Калифорния, США: 1993 г. Намотка накаливания; стр. 232–247. [Google Scholar]
45. Куссиус С., Бергсма О.К., Дебеккер А. Разработка барабанной намотки для специальных продуктов; Труды 15-го Американского общества композитов; Колледж Стейтон, Техас, США. 26 сентября 2000 г. [Google Scholar]
46. Лосси М., Ван Брассел Х. Принципы проектирования филаментной намотки. Композиции Произв. 1994;5:5–13. doi: 10.1016/0956-7143(94)
-0. [CrossRef] [Google Scholar]
47. Аковали Г., редактор. Справочник по композитному производству. ООО «Рапра Технологии»; Шрусбери, Великобритания: 2001. [Google Scholar]
48. DuVall F.W. Сравнение стоимости намотки мокрой нитью и намотки нитью из препрега для баллонов CNG типа II и типа IV. САМП Дж. 2001; 37:38–42. [Google Scholar]
САМП Дж. 2001; 37:38–42. [Google Scholar]
49. Аррабие П.А., Мэй Д., Экрич М., Длугай А.М. Обзор современных технологий производства: обработка непрерывных ровингов, пропитанных термореактивной смолой. Полим. Композиции 2021;42:5630–5655. doi: 10.1002/pc.26274. [Перекрестная ссылка] [Академия Google]
50. Шибли А.М. Филаментная обмотка. В: Любин Г., редактор. Справочник по композитам. Спрингер; Бостон, Массачусетс, США: 1982. стр. 449–478. [Google Scholar]
51. Галантуччи Л.М., Пипери Э., Лавеккья Ф., Жаво А. Полуавтоматические недорогие системы трехмерного лазерного сканирования для обратного проектирования. Процедура ЦИРП. 2015;28:94–99. doi: 10.1016/j.procir.2015.04.016. [CrossRef] [Google Scholar]
52. Установка и настройка программного обеспечения контроллера ЧПУ Mach4, версия 3. Artsoft Software Incorporated; Клуж, Румыния: 2008 г. [Google Scholar]
53. Радзевич С.П. Геометрия поверхностей. 2-е изд. Спрингер Природа; Cham, Switzerland: 2020.