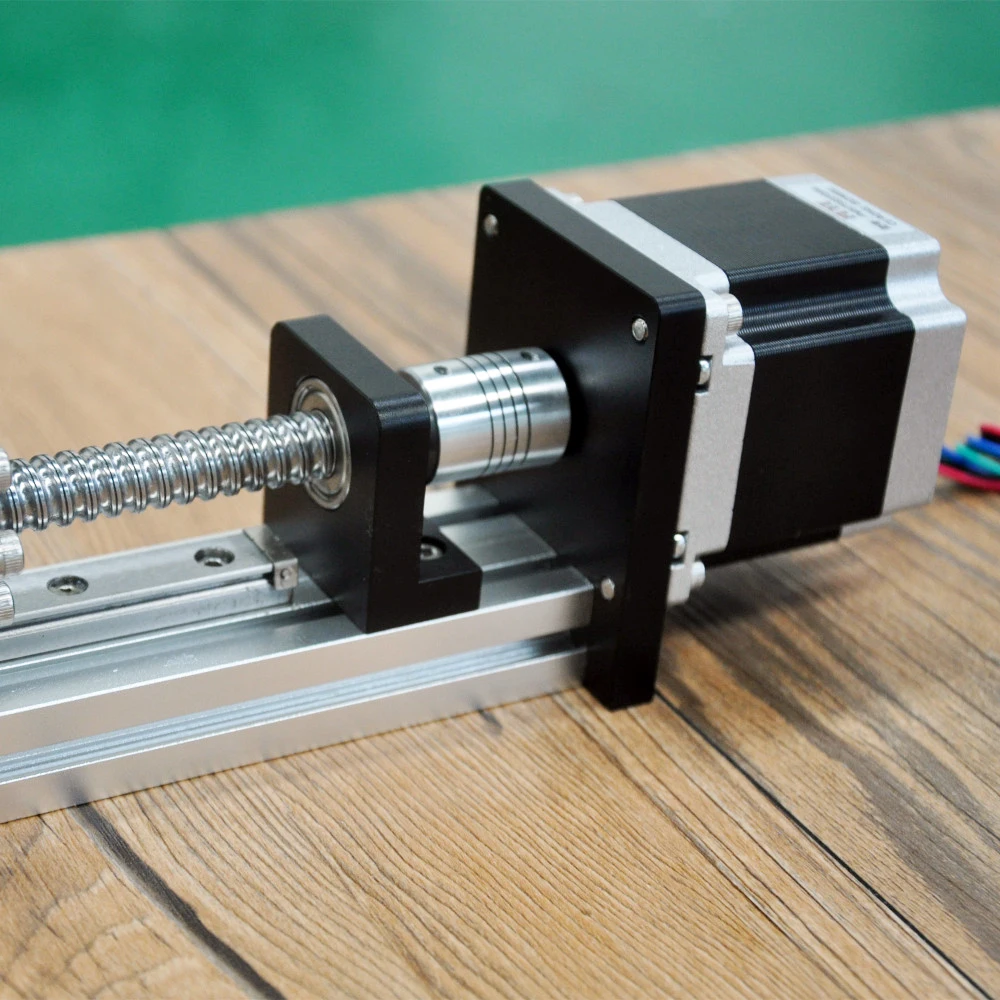
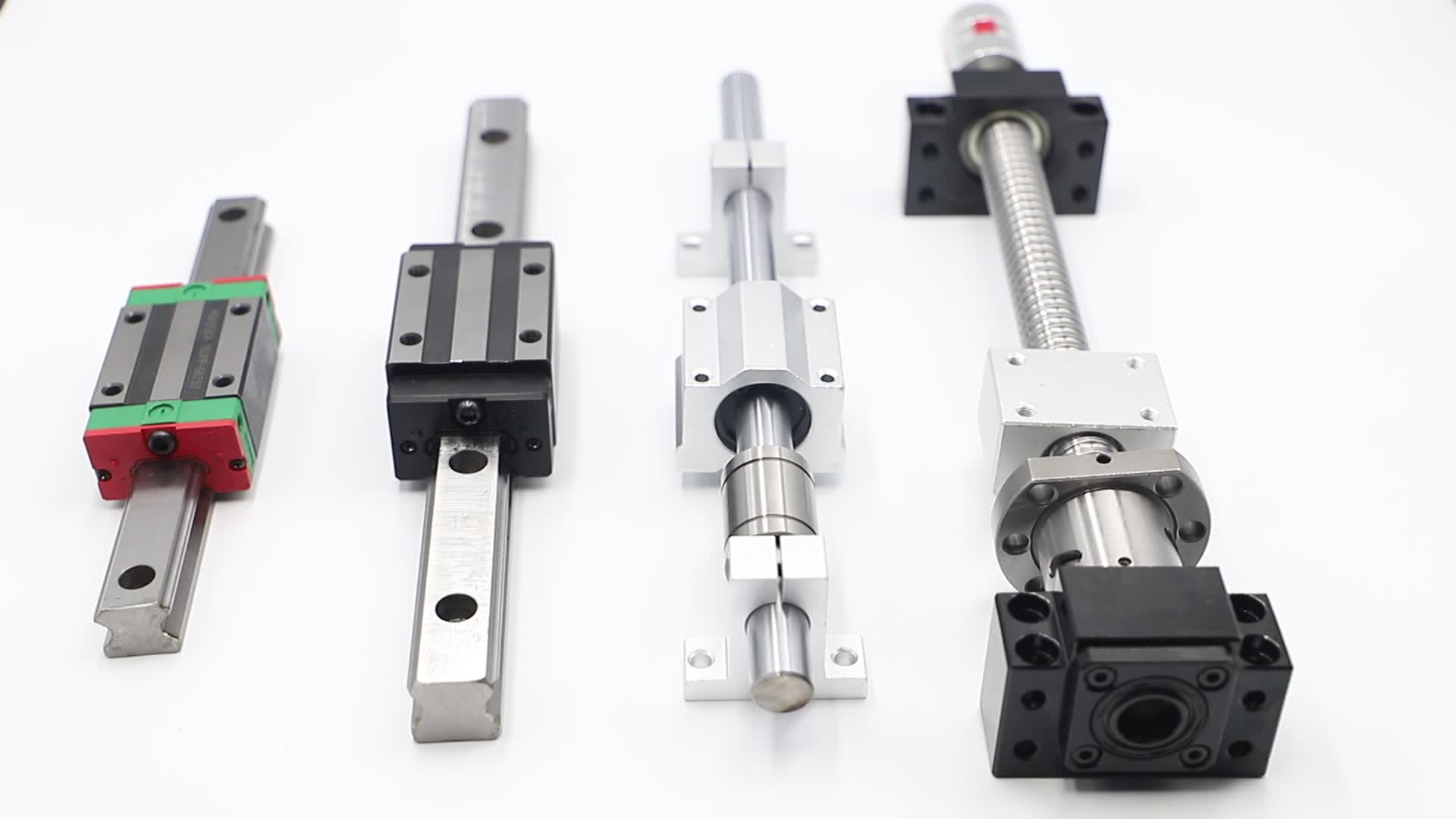
Шариковые Направляющие Для Станков
Шариковые направляющие для станков – это линейные направляющие для восприятия сил из всех поперечных направлений и моментов вращения всех осей, служат для направления и позиционирования при применении в оборудовании и станках ЧПУ.
К основным характеристикам рельсовых направляющих можно отнести высокую жесткость, превосходную способность выдерживать динамическую и статическую нагрузку, плавность линейного перемещения и высокую защищенность каретки от загрязнителей. Эти свойства направлены на достижение высокого качества механической обработки с одновременным повышением геометрической точности и улучшением качества поверхности обрабатываемых заготовок на станке ЧПУ. Высокая жесткость рельсовых направляющих обеспечивает повышенную устойчивость к вибрациям, меньшие амплитуды колебаний и, таким образом, значительно продлевает срок службы станка. Шариковые и роликовые направляющие качения экономически эффективны и соответствуют требованиям современного машиностроения.
Устройство шариковых направляющих станков
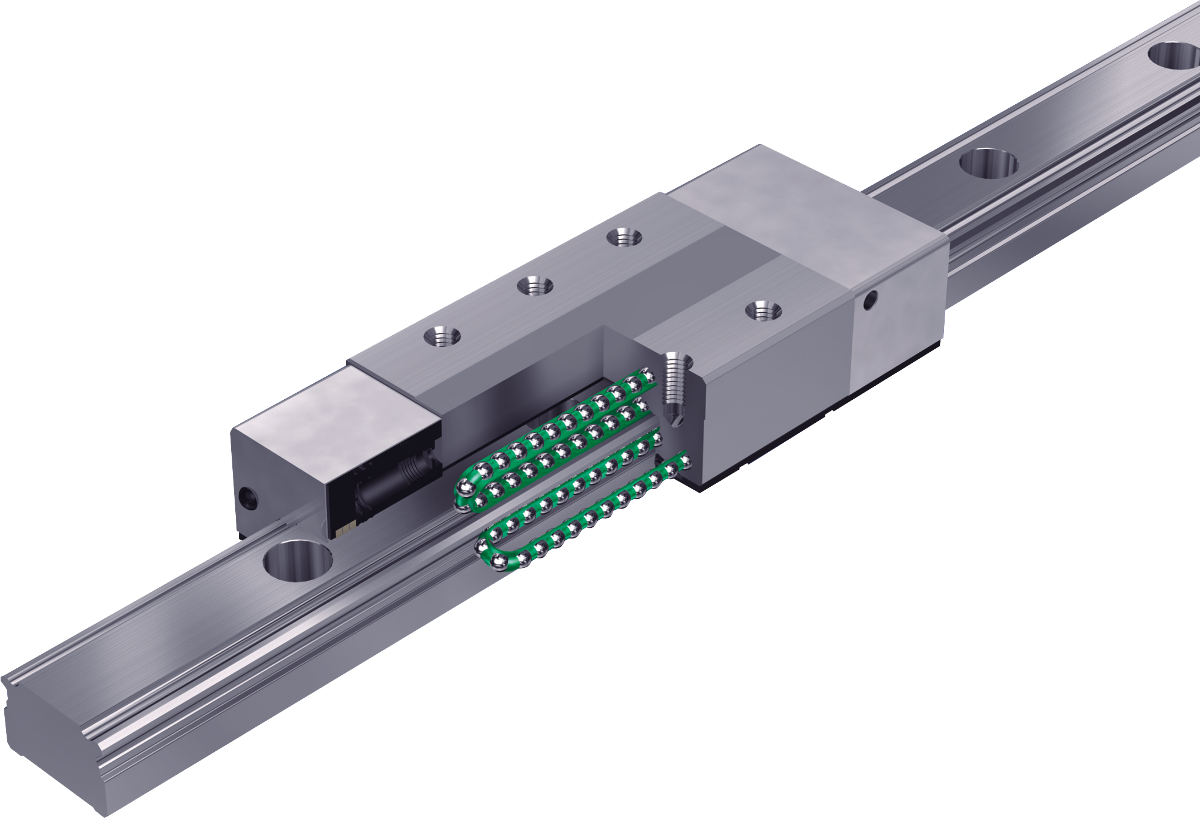
Шариковая направляющая станка состоит из рельса (шины) 1 (рис. 1, а) и, как правило, двух шариковых кареток 3, снабженных узлами смазывания 2 и уплотнениями 4. В каждой каретке одной из конструкций находятся четыре замкнутых цепочки шариков 5 и 6, циркулирующих в каретке при ее движении вдоль рельса. Предварительный натяг в опоре создан подбором шариков по диаметру.
В каретке без сепаратора (рис. 1, б) шарики находятся в контакте между собой, что сопровождается их повышенным износом. Если шарики разделены гибким сепаратором 7 (рис. 1, в), то улучшается их смазывание и уменьшается износ.
Рис. 1. Шариковая направляющая
Рабочие дорожки на рельсе бывают арочного и полукруглого профиля. При нагружении каретки с арочным профилем канавок на них возникают четыре пятна контакта ( рис. 2, а). При этом точки А и В пятна контакта находятся на разных расстояниях от оси С–С вращения шарика и поэтому имеют разные линейные скорости, хотя за одно и то же время проходят одинаковый путь. Это возможно потому, что шарик проскальзывает на рабочей дорожке. В направляющих полукруглого профиля (рис. 2, б) разность d2 – d1 значительно меньше, чем в направляющих арочного профиля. Этим обеспечиваются меньшее проскальзывание шариков и повышенная долговечность направляющих полукруглого профиля.
2, а). При этом точки А и В пятна контакта находятся на разных расстояниях от оси С–С вращения шарика и поэтому имеют разные линейные скорости, хотя за одно и то же время проходят одинаковый путь. Это возможно потому, что шарик проскальзывает на рабочей дорожке. В направляющих полукруглого профиля (рис. 2, б) разность d2 – d1 значительно меньше, чем в направляющих арочного профиля. Этим обеспечиваются меньшее проскальзывание шариков и повышенная долговечность направляющих полукруглого профиля.
Рис. 2. Формы рабочих дорожек направляющих
Применяются направляющие с двумя, четырьмя и шестью цепочками шариков. Направляющие с двумя цепочками (рис. 3, а) компактны, но имеют сравнительно невысокие нагрузочную способность и жесткость. Конструкции с четырьмя цепочками шариков (
Прежде, чем купить шариковые направляющие для станка необходимо определить модификацию и типоразмер исходя из конкретной поставленной задачи. Если рельсы и каретки приобретаются для ремонта оборудования (ЧПУ станка), то нужно выяснить маркировку, указанную на них.
Рис. 3. Виды конструкций цепочек шариков направляющих
Виды направляющих станков с ЧПУ
Виды направляющих для станков с ЧПУ различаются по формам и типам работы. В этой статье мы рассмотрим гидродинамические и гидростатические виды направляющих.
Гидродинамические направляющие
Гидродинамические направляющие отличаются простотой конструкции, но хорошо работают лишь при достаточно больших скоростях скольжения, которым соответствуют скорости главного движения (продольно-строгальные, карусельные станки). Гидродинамический эффект, т.е. эффект всплывания подвижного узла, создается при помощи пологих клиновых скосов между смазочными канавками, выполненных на рабочей длине направляющих.![]() В образованные таким образом сужающиеся зазоры при движении затягивается смазка и обеспечивается разделение трущихся поверхностей слоем жидкости. Недостатком гидродинамического вида направляющих для станков с ЧПУ является нарушение жидкостного трения в периоды разгона и торможения подвижного узла, что приводит их к износу.
В образованные таким образом сужающиеся зазоры при движении затягивается смазка и обеспечивается разделение трущихся поверхностей слоем жидкости. Недостатком гидродинамического вида направляющих для станков с ЧПУ является нарушение жидкостного трения в периоды разгона и торможения подвижного узла, что приводит их к износу.
Гидростатические направляющие
Гидростатические направляющие имеют более широкое применение. Они обеспечивают жидкостное трение при любых скоростях скольжения, поэтому имеют очень малое трение, высокую демпфирующую способность, достаточную жесткость (хотя ниже, чем у направляющих скольжения и качения). Масляный слой в этих направляющих обеспечивается подачей масла под давлением. Его толщина составляет 10–50 мкм, в отдельных случаях — до 100 мкм. Масло под давлением подается в карманы на направляющих, глубина которых составляет обычно 1–4 мм. По длине направляющих выполняют несколько каналов, разделенных дренажными канавками. Направляющие гидростатического вида для станков с ЧПУ бывают незамкнутыми (без планок) и замкнутыми, в которых масло подается как на основные грани, так и на вспомогательные (планки). Первые применяют обычно, если нормальная сила, действующая на рабочий узел станка, велика и приблизительно постоянна (например, при большой массе подвижного узла). Вторые воспринимают опрокидывающие моменты, имеют значительно более высокую жесткость, но требуют тщательного изготовления.
Направляющие гидростатического вида для станков с ЧПУ бывают незамкнутыми (без планок) и замкнутыми, в которых масло подается как на основные грани, так и на вспомогательные (планки). Первые применяют обычно, если нормальная сила, действующая на рабочий узел станка, велика и приблизительно постоянна (например, при большой массе подвижного узла). Вторые воспринимают опрокидывающие моменты, имеют значительно более высокую жесткость, но требуют тщательного изготовления.
Недостатки данных направляющих данного вида: необходимость в гидравлической аппаратуре для подачи, циркуляции, фильтрации и сбора масла; существенный нагрев; трудность фиксации положения рабочего органа; повышенные требования к уходу в процессе эксплуатации.
Применяются гидростатические направляющие в прецизионных станках, а также в тяжелых и уникальных станках с ЧПУ.
Аэростатические направляющие
Направляющие с газовой смазкой — аэростатические по принципу работы похожи на гидростатические направляющие.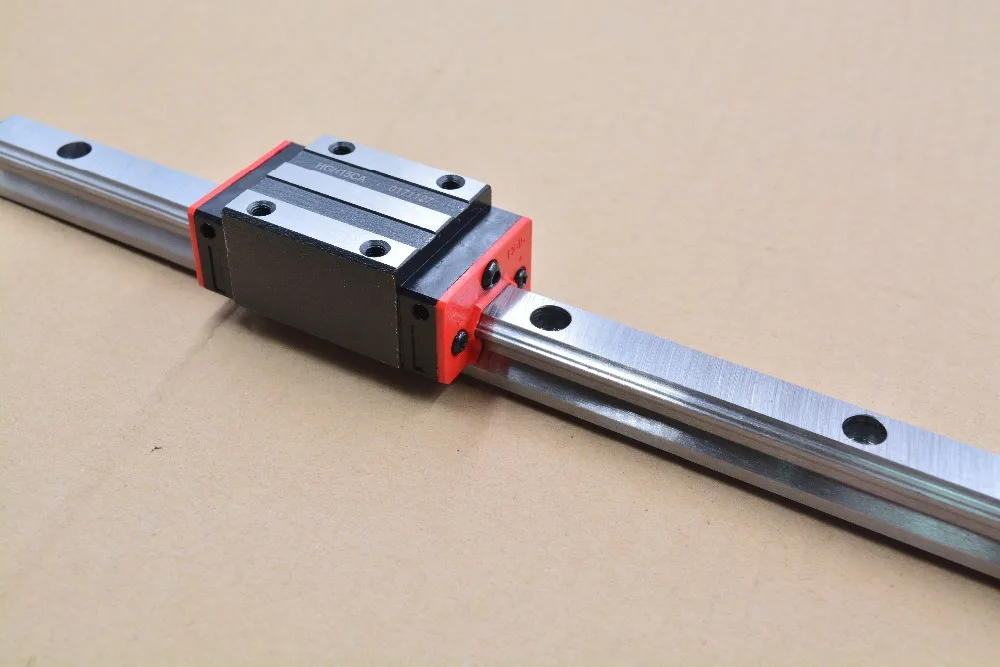 Только аэростатические направляющие при работе разделены слоем воздуха, подаваемого в рабочий зазор под давлением. В результате они имеют самое низкое трение, высокую долговечность и точность позиционирования. При прекращении подачи воздуха обеспечивается надежная фиксация рабочего органа станка. Однако нагрузочная способность, жесткость и динамические характеристики у них несколько ниже, чем у других видов направляющих.
Только аэростатические направляющие при работе разделены слоем воздуха, подаваемого в рабочий зазор под давлением. В результате они имеют самое низкое трение, высокую долговечность и точность позиционирования. При прекращении подачи воздуха обеспечивается надежная фиксация рабочего органа станка. Однако нагрузочная способность, жесткость и динамические характеристики у них несколько ниже, чем у других видов направляющих.
Применяются такие виды направляющих в станках с ЧПУ для обработки печатных плат, в координатно-измерительных машинах, а также в ряде других станков.
Статьи по станкам ЧПУ
Более 1000 статей о станках и инструментах, методах обработки металлов на станках с ЧПУ.
Предыдущая статья
Следующая статья
Магнитный направитель швадля швейной машины – MadamSew
Магнитная направляющая для швейной машины – МадамШью перейти к содержанию Откройте для себя сегодняшнее ежедневное предложение — купите сейчас- Описание
- Технические характеристики
- Инструкции и многое другое
- Доставка/возврат
Описание
Этот высококачественный, прочный и простой в использовании магнитный направитель шва
 Независимо от того, насколько вы опытны, прямые швы (как в точных швах) могут быть серьезно пугающими. Магнитный направитель шва от MadamSew действительно помогает! Поместите маленький магнит на игольную пластину швейной машины и позвольте ткани скользить по направителю, чтобы аккуратно закончить любую работу.
Независимо от того, насколько вы опытны, прямые швы (как в точных швах) могут быть серьезно пугающими. Магнитный направитель шва от MadamSew действительно помогает! Поместите маленький магнит на игольную пластину швейной машины и позвольте ткани скользить по направителю, чтобы аккуратно закончить любую работу.
Всегда ровные швы и профессиональные результаты!
Расположите магнит на металлической игольной пластине швейной машины на нужной ширине шва.
Магнит надежно фиксируется во время шитья.
Легко извлекайте и перемещайте магнитную направляющую.
Примечание: для швов шириной ¼ дюйма вам нужно либо поместить направитель перед прижимной лапкой, либо сдвинуть иглу до упора вправо. В противном случае ваша прижимная лапка будет мешать.
Гарантированный компьютеризированный сейф для швейной машины . Швейные машины не подвержены влиянию магнитных полей.

Магнитный направитель шва поместится в маленьком отсеке для инструментов, входящем в комплект вашей швейной машины, или просто сохраните его прямо на игольной пластине. (или на вашем холодильнике! …шутка :-))

Технические характеристики
- Размер: 1 ¾ x ¾ x ¼ дюйма
- Вес: 0,41 унции (11,7 г)
- Материал: нержавеющая сталь
Используйте его на большинстве швейных машин с металлической игольной пластиной. Он не будет мешать работе электроники вашей компьютеризированной швейной машины.
Инструкции и прочее
Расположите магнит на металлической игольной пластине швейной машины на нужной ширине шва и дайте ткани скользить по направителю, чтобы получить прямые швы.
Магнитная направляющая для швов MadamSew поставляется с инструкциями для пользователя на упаковке. Для получения подробных инструкций посетите наш Электронное руководство по магнитному шву .
Вы хотите это? Как и все довольные клиенты ниже?
Нажмите кнопку «Добавить в корзину» в верхней части экрана, чтобы купить (вы сможете просмотреть и добавить в корзину больше товаров, прежде чем начать процесс безопасной оплаты).
Доставка/возврат
Когда я получу свой заказ?- Вы должны получить свой заказ в течение 2-5 рабочих дней после отправки посылки. Мы прилагаем все усилия, чтобы отгружать заказы в порядке очереди, в зависимости от наличия товара, как можно быстрее.
- Для международных заказов Ваш заказ отправляется с нашего международного склада и будет доставлен в течение 2-5 недель. Однако в основном нам удается оставаться ниже этого верхнего предела.
- Конечно! Все продукты Madam Sew поставляются с 60-дневной гарантией возврата денег , мы стремимся предоставить нашим клиентам наилучшее обслуживание клиентов. Если вы хотите запросить возврат средств, отправьте электронное письмо в нашу службу поддержки для получения помощи.
 Если вы хотите запросить возврат средств, отправьте электронное письмо в нашу службу поддержки для получения помощи.
Если вы хотите запросить возврат средств, отправьте электронное письмо в нашу службу поддержки для получения помощи.- Электронная почта нашей службы поддержки клиентов: [email protected] или вы можете позвонить нам по телефону 1-844-284-5336.
Бесплатная доставка при заказе на сумму более 50 долларов США
Быстрая доставка
Товар, который есть в наличии, будет доставлен вам в течение 2-3 рабочих дней.
60-дневная гарантия возврата денег
На всю продукцию Madamsew предоставляется 60-дневная гарантия. Легкий возврат, без вопросов!
Обслужено более 250 000 довольных клиентов
Настоящие люди, такие же, как и вы.
Полезный предметПользовался им в прошлом, и он был потерян при переезде. Люблю возвращать его для точных швов.
Магнитный направитель шва Я еще не использовал его, но мне не терпится его использовать! Я думаю, это будет очень полезно. Какой изящный маленький инструмент.
Какой изящный маленький инструмент.
Я не ожидал, что это будет так полезно! Отличный маленький инструмент
Магнитный направитель шваLove it отличная цена
комплиментыэта часть оборудования действительно потрясающая, мне она нравится. Я шью с десяти лет. какой помощник. пусть эти вещи приходят к нам, кто любит шить. еще раз спасибо за такой отличный продукт anne cloninger, bessemer city, nc
123
Руководство по обучению с подкреплением в процессе самостоятельных игр
Ромеро, П. А. и Арнольд, Ф. Х. Изучение белковых фитнес-ландшафтов путем направленной эволюции. Нац. Преподобный Мол. Клеточная биол. 10 , 866–876 (2009).
Артикул Google Scholar
Ву, З., Кан, С.Дж., Льюис, Р.Д., Виттманн, Б.Дж. и Арнольд, Ф.Х. Направленная эволюция белков с помощью машинного обучения с комбинаторными библиотеками. Проц. Натл акад. науч. США 116 , 8852–8858 (2019).
Проц. Натл акад. науч. США 116 , 8852–8858 (2019).
Артикул Google Scholar
Ян, К. К., Ву, З. и Арнольд, Ф. Х. Направленная эволюция под управлением машинного обучения для белковой инженерии. Нац. Методы 16 , 687–694 (2019).
Артикул Google Scholar
Луо Ю. и др. ECNet — это эволюционно интегрированная в контекст среда глубокого обучения для белковой инженерии. Нац. коммун. 12 , 5743–5756 (2021).
Артикул Google Scholar
Гринхал, Дж. К., Фальберг, С. А., Пфлегер, Б. Ф. и Ромеро, П. А. Разработка ацил-АСР-редуктазы с помощью машинного обучения для улучшения производства жирных спиртов in vivo. Нац. коммун. 12 , 5825–5834 (2021).
Артикул Google Scholar
 “>
“>Виттманн, Б. Дж., Юэ, Ю. и Арнольд, Ф. Х. Информированный дизайн набора для обучения обеспечивает эффективную направленную эволюцию белков с помощью машинного обучения. Клеточная система 12 , 1026–1045 (2021).
Артикул Google Scholar
Хи Б.Л. и Ян К.К. Адаптивное машинное обучение для белковой инженерии. Курс. мнение Структура биол. 72 , 145–152 (2022).
Артикул Google Scholar
Цю, Ю., Ху, Дж. и Вэй, Г.-В. Направленная эволюция с помощью кластерного обучения. Нац. вычисл. науч. 1 , 809–818 (2021).
Артикул Google Scholar
Кавасима, С. и Канехиса, М. AAindex: база данных индексов аминокислот. Рез. нуклеиновых кислот. 28 , 374 (2000).
Артикул Google Scholar
 “>
“>Офер, Д. и Линиал, М. ProFET: инженерия признаков фиксирует функции белков высокого уровня. Биоинформатика 31 , 3429–3436 (2015).
Артикул Google Scholar
Георгиев А.Г. Интерпретируемые числовые дескрипторы аминокислотного пространства. Дж. Вычисл. биол. 16 , 703–723 (2009).
Артикул Google Scholar
Эльнаггар, А. и др. ProtTrans: к пониманию языка жизни через самоконтролируемое обучение. IEEE Trans. Анальный узор. Мах. Интел. 44 , 7112–7127 (2022).
Артикул Google Scholar
Ривз, А. и др. Биологическая структура и функция возникают в результате масштабирования неконтролируемого обучения до 250 миллионов белковых последовательностей. Проц. Натл акад. науч. США 118 , e2016239118 (2021).
Артикул Google Scholar
Рао, Р. М. и соавт. Трансформатор МСА. Проц. Мах. Обучение рез. 139 , 8844–8856 (2021).
Синай, С. и др. AdaLead: простой и надежный алгоритм адаптивного жадного поиска для построения последовательности. Препринт на https://arxiv.org/abs/2010.02141 (2020).
Бисвас С., Химуля Г., Элли Э. К., Эсвелт К. М. и Черч Г. М. Инженерия белков с низким содержанием азота и глубокое обучение с эффективным использованием данных. Нац. Методы 18 , 389–396 (2021).
Артикул Google Scholar
Рен З. и др. Проксимальное исследование для проектирования белковых последовательностей на основе моделей. Проц. Мах. Обучение рез. 162 , 18520–18536 (2022).
Анищенко И. и др. Дизайн белка de novo с помощью глубокой сетевой галлюцинации. Природа 600 , 547–552 (2021).
и др. Дизайн белка de novo с помощью глубокой сетевой галлюцинации. Природа 600 , 547–552 (2021).
Артикул Google Scholar
Zeming, L. et al. Эволюционное предсказание структуры белка на атомном уровне с помощью языковой модели. Наука 379 , 1123–1130 (2023).
Артикул MathSciNet Google Scholar
Verkuil, R. et al. Языковые модели обобщаются за пределы природных белков. Препринт в bioRxiv https://doi.org/10.1101/2022.12.21.521521 (2022).
Hie, B. et al. Язык программирования высокого уровня для генеративного проектирования белков. Препринт в bioRxiv https://doi.org/10.1101/2022.12.21.521526 (2022).
Гонсалес, Дж. и др. Пакетная байесовская оптимизация с помощью локального штрафа. Проц. Мах. Обучение рез. 51 , 648–657 (2016).
Мах. Обучение рез. 51 , 648–657 (2016).
Google Scholar
Хай Б., Брайсон Б. Д. и Бергер Б. Использование неопределенности в машинном обучении ускоряет биологические открытия и проектирование. Сотовая система. 11 , 461–477 (2020).
Артикул Google Scholar
Williams, CK & Rasmussen, CE Gaussian Processes for Machine Learning (MIT Press, 2006).
Ромеро, П. А., Краузе, А. и Арнольд, Ф. Х. Навигация по белковой пригодности с помощью гауссовских процессов. Проц. Натл акад. науч. США 110 , E193–E201 (2013 г.).
Артикул MathSciNet МАТЕМАТИКА Google Scholar
Брайант, Д. Х. и др. Глубокая диверсификация капсидного белка AAV с помощью машинного обучения. Нац. Биотехнолог. 39 , 691–696 (2021).
Нац. Биотехнолог. 39 , 691–696 (2021).
Артикул Google Scholar
Брукс, Д. Х. и Листгартен, Дж. Проектирование с помощью адаптивной выборки. Препринт на https://arxiv.org/abs/1810.03714 (2018).
Брукс, Д., Парк, Х. и Листгартен, Дж. Кондиционирование с помощью адаптивной выборки для надежного проектирования. Проц. Мах. Обучение рез. 97 , 773–782 (2019).
Кастро, Э. и др. Генерация белков на основе трансформаторов с регуляризованной оптимизацией латентного пространства. Нац. Мах. Интел. 4 , 840–851 (2022).
Артикул Google Scholar
Browne, C.B. et al. Обзор методов поиска по дереву Монте-Карло. IEEE Trans. вычисл. Интел. AI Games 4 , 1–43 (2012).
Артикул Google Scholar
 “>
“>Сильвер, Д. и др. Освоение игры в го с глубокими нейронными сетями и поиском по дереву. Природа 529 , 484–489 (2016).
Артикул Google Scholar
Сильвер, Д. и др. Освоение игры Го без ведома человека. Природа 550 , 354–359 (2017).
Артикул Google Scholar
Сильвер, Д. и др. Общий алгоритм обучения с подкреплением, который осваивает шахматы, сёги и го посредством самостоятельной игры. Наука 362 , 1140–1144 (2018).
Артикул MathSciNet МАТЕМАТИКА Google Scholar
Mirhoseini, A. et al. Методология размещения графов для быстрого проектирования микросхем. Природа 594 , 207–212 (2021).
Артикул Google Scholar
 “>
“>Дегрейв, Дж. и др. Магнитный контроль плазмы токамака посредством глубокого обучения с подкреплением. Природа 602 , 414–419 (2022).
Артикул Google Scholar
Шри Соундарья С.В. и др. Многоцелевая целенаправленная оптимизация стабильных органических радикалов de novo для проточных окислительно-восстановительных батарей на водной основе. Нац. Мах. Интел. 4 , 720–730 (2022).
Артикул Google Scholar
Фавзи, А. и др. Обнаружение более быстрых алгоритмов умножения матриц с обучением с подкреплением. Природа 610 , 47–53 (2022).
Артикул МАТЕМАТИКА Google Scholar
Фэн, С. и др. Плотное обучение с подкреплением для проверки безопасности автономных транспортных средств. Природа 615 , 620–627 (2023).
Артикул Google Scholar
Angermueller, C. et al. Обучение с подкреплением на основе моделей для проектирования биологических последовательностей. In International Conference on Learning Representations (под редакцией А. Раша), 1–23 апреля (ICLR, 2020).
Исаак, И. Д. и др. Нисходящее проектирование белковых архитектур с обучением с подкреплением. Наука 380 , 266–273 (2023).
Артикул Google Scholar
Накацу, Т. и др. Структурная основа спектральной разницы в биолюминесценции люциферазы. Природа 440 , 372–376 (2006).
Артикул Google Scholar
Саркисян К.С. и др. Местный фитнес-ландшафт зеленого флуоресцентного протеина. Природа 533 , 397–401 (2016).
Артикул Google Scholar
Меламед, Д., Янг, Д.Л., Гэмбл, С.Е., Миллер, С.Р. и Филдс, С. Глубокое мутационное сканирование домена RRM поли(А)-связывающего белка Saccharomyces cerevisiae . РНК 19 , 1537–1551 (2013).
Артикул Google Scholar
Джейн, М. и др. Дизайн биологической последовательности с помощью GFlowNets. Проц. Мах. Обучение рез. 162 , 9786–9801 (2022).
Google Scholar
Рао, Р. и др. Оценка обучения переносу белка с помощью TAPE. Доп. Нейронная инф. Процесс Сист. 32 , 9689–9701 (2019).
Google Scholar
Хаарноя, Т., Чжоу, А., Аббил, П. и Левин, С. Мягкий актер-критик: внеполитическое максимальное энтропийное глубокое обучение с подкреплением со стохастическим актером. Проц. Мах. Обучение рез. 80 , 1861–1870 (2018).
Проц. Мах. Обучение рез. 80 , 1861–1870 (2018).
Shanehsazzadeh, A., Belanger, D. & Dohan, D. Необходимо ли трансферное обучение для предсказания белкового ландшафта? Препринт на https://arxiv.org/abs/2011.03443 (2020).
Элли, Э. К., Химуля, Г., Бисвас, С., Аль-Курайши, М. и Черч, Г. М. Унифицированная рациональная белковая инженерия с обучением глубокому представлению на основе последовательностей. Нац. Методы 16 , 1315–1322 (2019).
Артикул Google Scholar
Иллиг, А.-М., Сидхофф, Н.Э., Шванеберг, У. и Давари, доктор медицины. Гибридная модель, сочетающая эволюционную вероятность и машинное обучение, использует управляемую данными белковую инженерию. Препринт в bioRxiv https://doi.org/10.1101/2022.06.07.495081 (2022).
Meier, J. et al. Языковые модели позволяют точно предсказать влияние мутаций на функцию белка. В Достижения в системах обработки нейронной информации 34 (ред. М. Ранзато), 29287–29303 (NeurIPS, 2021).
В Достижения в системах обработки нейронной информации 34 (ред. М. Ранзато), 29287–29303 (NeurIPS, 2021).
Линдинг Р. и др. Предсказание белкового расстройства: значение для структурной протеомики. Структура 11 , 1453–1459 (2003).
Артикул Google Scholar
Джампер, Дж. и др. Высокоточное предсказание структуры белка с помощью AlphaFold. Природа 596 , 583–589 (2021).
Артикул Google Scholar
Evans, R. et al. Предсказание белковых комплексов с помощью AlphaFold-Multimer. Препринт в bioRxiv https://doi.org/10.1101/2021.10.04.463034 (2022).
Цабан, Т. и др. Использование нейронных сетей для укладки белков для стыковки пептид-белок. Нац. коммун. 13 , 176 (2022).
Артикул Google Scholar
 “>
“>Джендруш, М., Корбел, Дж. О. и Садик, С. К. AlphaDesign: структура дизайна белка de novo на основе AlphaFold. Препринт в bioRxiv https://doi.org/10.1101/2021.10.11.463937 (2021).
Вики, Б. и др. Галлюцинации симметричных белковых комплексов. Наука 378 , 56–61 (2022).
Артикул Google Scholar
Dauparas, J. et al. Надежный дизайн белковой последовательности на основе глубокого обучения с использованием ProteinMPNN. Наука 378 , 49–56 (2022).
Артикул Google Scholar
Bennett, N. R. et al. Улучшение конструкции связующего белка de novo с помощью глубокого обучения. Нац. коммун. 14 , 2625–2633 (2023).
Артикул Google Scholar
Брайант, П. и Элофссон, А. EvoBind: направленная in silico эволюция связующих пептидов с помощью AlphaFold. Препринт в bioRxiv https://doi.org/10.1101/2022.07.23.501214 (2022).
и Элофссон, А. EvoBind: направленная in silico эволюция связующих пептидов с помощью AlphaFold. Препринт в bioRxiv https://doi.org/10.1101/2022.07.23.501214 (2022).
Mirdita, M. et al. ColabFold: сделать фолдинг белка доступным для всех. Нац. Методы 19 , 679–682 (2022).
Тарин, А. и Кинни, Дж. Б. Logomaker: красивые последовательности логотипов в Python. Биоинформатика 36 , 2272–2274 (2020).
Артикул Google Scholar
Миллер, Б. Р. III и др. MMPBSA.py: эффективная программа для расчета свободной энергии в конечном состоянии. J. Chem. Теория вычисл. 8 , 3314–3321 (2012).
Hopf, T. A. et al. Фреймворк EVcouplings Python для коэволюционного анализа последовательностей. Биоинформатика 35 , 1582–1584 (2019).
Артикул Google Scholar
 “>
“>Welsh, J.P., Patel, K.G., Manthiram, K. & Swartz, J.R. Множественно мутировавшие люциферазы Gaussia обеспечивают пролонгированную и интенсивную биолюминесценцию. Биохим. Биофиз. Рез. коммун. 389 , 563–568 (2009).
Артикул Google Scholar
Ким С. Б., Судзуки Х., Сато М. и Тао Х. Суперлюминесцентные варианты морских люцифераз для биоанализа. Анал. хим. 83 , 8732–8740 (2011).
Артикул Google Scholar
Zhang, C., Zheng, W., Mortuza, S., Li, Y. & Zhang, Y. DeepMSA: построение глубокого множественного выравнивания последовательностей для улучшения предсказания контактов и распознавания укладки для белков с отдаленной гомологией. Биоинформатика 36 , 2105–2112 (2020).
Артикул Google Scholar
 “>
“>Ву, Н. и др. Структура раствора люциферазы Gaussia с пятью дисульфидными связями и идентификация предполагаемой полости для связывания коэлентеразина с помощью гетероядерного ЯМР. Науч. Респ. 10 , 20069 (2020).
Артикул Google Scholar
Лу, Х. и др. Разработка гидролаз для деполимеризации ПЭТ с помощью машинного обучения. Природа 604 , 662–667 (2022).
Артикул Google Scholar
Норн, К. и др. Дизайн белковой последовательности путем оптимизации конформационного ландшафта. Проц. Натл акад. науч. США 118 , e2017228118 (2021).
Артикул Google Scholar
Хсу, К. и др. Изучение обратного складывания из миллионов предсказанных структур. Проц. Мах. Обучение рез. 162 , 8946–8970 (2022).
Google Scholar
Makowski, E.K. et al. Совместная оптимизация аффинности и специфичности терапевтических антител с использованием моделей машинного обучения, которые обобщают новое мутационное пространство. Нац. коммун. 13 , 3788 (2022).
Артикул Google Scholar
Markel, U. et al. Достижения в сверхвысокопроизводительном скрининге для направленной эволюции ферментов. Хим. соц. 49 , 233–262 (2020).
Артикул Google Scholar
Жерар, А. и др. Высокопроизводительный скрининг и секвенирование антител на основе активности отдельных клеток с использованием капельной микрофлюидики. Нац. Биотехнолог. 38 , 715–721 (2020).
Артикул Google Scholar
 “>
“>Дёрр, М. и др. Полностью автоматизированный высокопроизводительный скрининг библиотеки ферментов с использованием роботизированной платформы. Заяв. Биохим. Биотехнолог. 113 , 1421–1432 (2016).
Google Scholar
Wittmann, B.J. et al. evSeq: экономичное секвенирование ампликонов каждого варианта в библиотеке белков. АКС Синтез. биол. 11 , 1313–1324 (2022).
Артикул Google Scholar
Ингрэм, Дж., Гарг, В., Барзилай, Р. и Яаккола, Т. Генеративные модели для проектирования белков на основе графов. В Advances in Neural Information Processing Systems 32 (под редакцией H. Wallach et al.) 15820–15831 (NeurIPS, 2019).
Wang, J. et al. Создание каркасов функциональных сайтов белков с использованием глубокого обучения. Наука 377 , 387–394 (2022).
Артикул Google Scholar
Белл, Э. Л. и др. Биокатализ. Нац. Ред. Methods Primers 1 , 45 (2021).
Артикул Google Scholar
Hie, B.L. et al. Эффективная эволюция антител человека только на основе общих моделей белкового языка и информации о последовательности. Нац. Биотехнолог . https://doi.org/10.1038/s41587-023-01763-2 (2023 г.).
Система молекулярной графики PyMOL v.1.2 r3pre (Шредингер, 2011).
Хуанг X., Пирс Р. и Чжан Ю. EvoEF2: точная и быстрая функция энергии для вычислительного дизайна белков. Биоинформатика 36 , 1135–1142 (2020).
Артикул Google Scholar
Steinegger, M. et al. HH-suite3 для быстрого удаленного обнаружения гомологии и глубокого аннотирования белков. БМК Биоинформ. 20 , 473 (2019).
БМК Биоинформ. 20 , 473 (2019).
Артикул Google Scholar
Подгорная А. И., Лауб М. Т. Распространенная дегенерация и эпистаз на границе белок-белок. Наука 347 , 673–677 (2015).
Артикул Google Scholar
Бергстра Дж., Яминс Д. и Кокс Д. Создание науки о поиске моделей: оптимизация гиперпараметров в сотнях измерений для архитектур машинного зрения. Проц. Мах. Обучение рез. 28 , 115–123 (2013).
Hopf, T. A. et al. Эффекты мутации, предсказанные на основе ковариации последовательностей. Нац. Биотехнолог. 35 , 128–135 (2017).
Артикул Google Scholar
Крукс, Г. Э., Достопочтенный, Г., Чандония, Ж.-М. & Brenner, SE WebLogo: генератор последовательностей логотипов. Рез. генома. 14 , 1188–1190 (2004).
Рез. генома. 14 , 1188–1190 (2004).
Артикул Google Scholar
Schneider, T. D. & Stephens, R. M. Логотипы последовательности: новый способ отображения согласованных последовательностей. Рез. нуклеиновых кислот. 18 , 6097–6100 (1990).
Артикул Google Scholar
Моррис Г. и др. AutoDock4 и AutoDockTools4: автоматическая стыковка с избирательной гибкостью рецепторов. Дж. Вычисл. хим. 30 , 2785–2791 (2009 г.).
Артикул Google Scholar
Van Der Spoel, D. et al. GROMACS: быстрый, гибкий и бесплатный. Дж. Вычисл. хим. 26 , 1701–1718 (2005).
Артикул Google Scholar
Lindorff-Larsen, K. et al. Улучшенные торсионные потенциалы боковой цепи для силового поля белка Amber ff99SB. Белки 78 , 1950–1958 (2010).
et al. Улучшенные торсионные потенциалы боковой цепи для силового поля белка Amber ff99SB. Белки 78 , 1950–1958 (2010).
Артикул Google Scholar
Лу, Т. Собтоп v.1.0 (dev3.1) http://sobereva.com/soft/Sobtop (2022).
Низ Ф. Обновление программного обеспечения: программная система ORCA — версия 5.0. Wiley Interdiscip. Преп. Вычисл. Мол. науч. 12 , e1606 (2022).
Артикул Google Scholar
Йоргенсен В.Л., Чандрасекар Дж., Мадура Дж.Д., Импи Р.В. и Кляйн М.Л. Сравнение простых потенциальных функций для моделирования жидкой воды. J. Chem. физ. 79 , 926–935 (1983).
Артикул Google Scholar
Дарден Т., Йорк Д. и Педерсен Л. Сетка частиц Эвальда: метод N · log( N ) для сумм Эвальда в больших системах. J. Chem. физ. 98 , 10089–10092 (1993).
J. Chem. физ. 98 , 10089–10092 (1993).
Артикул Google Scholar
Бусси, Г., Донадио, Д. и Парринелло, М. Канонический сэмплирование посредством масштабирования скорости. J. Chem. физ. 126 , 014101 (2007).
Артикул Google Scholar
Парринелло М. и Рахман А. Полиморфные переходы в монокристаллах: новый метод молекулярной динамики. J. Appl. физ. 52 , 7182–7190 (1981).
Артикул Google Scholar
Huang, L. Тренировочные данные GFP и PAB1 для EvoPlay Figshare https://doi.org/10.6084/m9.figshare.23498195 (2023).
Huang, L GB1 и данные PhoQ EvoPlay Figshare https://doi.org/10.6084/m9.figshare.21767369.v3 (2023).
