Схема устройства плавного пуска двигателя
Время прочтения: 10 минут
Устройства плавного пуска двигателя (софтстартер, мягкий или плавный пускатель) – это прибор, позволяющий добиться плавного разгона или плавной остановки электродвигателя, скоординировать его крутящий момент и момент нагрузки, а также понизить уровень пускового тока, что способствует экономии электроэнергии.
Устройство плавного пуска двигателя также уменьшает вероятность перегрева электродвигателей, способствует повышению их срока службы, защищает от рывков в механической части привода двигателя.
Выделяют УПП двух типов:
- С открытым управлением – подача напряжения пуска происходит с задержкой во времени, вне зависимости от тока или скорости двигателя.
- С контролем замкнутого контура – контроль осуществляется над любыми параметрами выходного сигнала двигателя, например, над текущим током или скоростью.
Устройство плавного пуска серии «Спринт» производства «РУСЭЛТ»
Принцип работы
Стандартная схема УПП – это набор контактов. Их положение меняется, соответственно, изменяется и параметр входного напряжения. При этом сердечники устройств часто импульсного типа. Электрические катушки расположены за контактами.
Их положение меняется, соответственно, изменяется и параметр входного напряжения. При этом сердечники устройств часто импульсного типа. Электрические катушки расположены за контактами.
Работает УПП следующим образом. Управление напряжением, подаваемым на двигатель, с целью его плавного разгона или остановки, происходит путем изменения угла открытия тиристоров. В самом устройстве установлено 2 встречно-включенных тиристора для положительного и отрицательного полупериодов.
Сила тока в оставшейся без управления третьей фазе формируется из токов фаз под управлением. После настройки координация крутящего момента при пуске доводится до предельно низкой величины пускового тока.
Показатель тока самого двигателя снижается параллельно показателю пускового напряжения на пуске. Величина пускового момента снижается в квадратичном отношении к напряжению. Уровень напряжения контролирует пусковой ток и крутящий момент двигателя при его запуске или остановке.
В устройстве плавного пуска есть байпасные контакты, осуществляющие шунтирование тиристорных выпрямителей. Это понижает тепловые потери в них, а также снижает нагрев всего устройства, что обеспечивает его безопасную эксплуатацию. Сами контакты защищены от повреждений из-за тех или иных рабочих сбоев встроенной электронной дугогасительной системой.
Рекомендации по выбору УПП
При подборе устройства в первую очередь нужно исходить из технических характеристик используемого электродвигателя и интенсивности нагрузки. В зависимости от этого выделяют следующие пусковые характеристики:
- Легкий режим – значение пускового тока не больше 4хIном
- Тяжелый режим – нагрузка с большим показателем инерционного момента и с необходимым значением пускового тока не менее 4,5хIном (при времени разгона до 30 сек.)
- Очень тяжелый режим – максимальное значение инерционного момента, со значением пускового тока более 6хIном и продолжительным временем разгона.


Для выбора модели софтстартера необходимо руководствоваться таблицей нагрузки в зависимости от применения. Посмотреть её вы можете здесь, в одном из наших материалов.
При выборе конкретной модели необходимо учитывать нагрузку на двигатель и частоту запусков. При невысоких нагрузках целесообразно приобретать приборы без обратной связи. При частых пусках и большой нагрузке рекомендуется купить устройство плавного пуска с обратной связью.
Возврат к списку
Схема тиристорного устройства плавного пуска асинхронного электродвигателя
Александр Ситников (Кировская обл.)
Рассматриваемая в статье схема позволяет осуществить безударный пуск и торможение электродвигателя, увеличить срок службы оборудования и снизить нагрузку на электросеть. Плавный пуск достигается путём регулирования напряжения на обмотках двигателя силовыми тиристорами.
Устройства плавного пуска (УПП) широко применяются в различных электроприводах.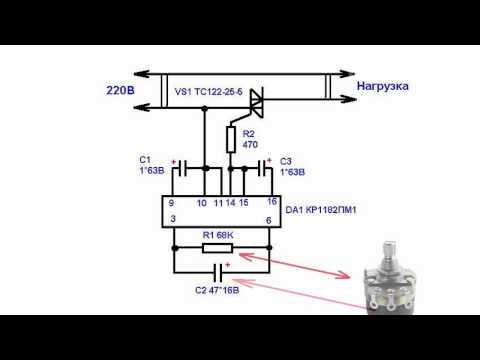 Структурная схема разработанного УПП приведена на рисунке 1, а диаграмма работы УПП – на рисунке 2. Основой УПП являются три пары встречно-параллельных тиристоров VS1 – VS6, включенных в разрыв каждой из фаз. Плавный пуск осуществляется за счёт постепенного
Структурная схема разработанного УПП приведена на рисунке 1, а диаграмма работы УПП – на рисунке 2. Основой УПП являются три пары встречно-параллельных тиристоров VS1 – VS6, включенных в разрыв каждой из фаз. Плавный пуск осуществляется за счёт постепенного
увеличения прикладываемого к обмоткам электродвигателя сетевого напряжения от некоторого начального значения Uначдо номинального Uном. Это достигается путём постепенного увеличения угла проводимости тиристоров VS1 – VS6 от минимального значения до максимального в течение времени Тпуск, называемого временем пуска.
Обычно значение Uначсоставляет 30…60% от Uном, поэтому пусковой момент электродвигателя существенно меньше, чем в случае подключения электродвигателя на полное напряжение сети. При этом происходит постепенное натяжение приводных ремней и плавное зацепление зубчатых колес редуктора. Это благоприятно сказывается на снижении динамических нагрузок электропривода и, как следствие, способствует продлению срока службы механизмов и увеличению интервала между ремонтами.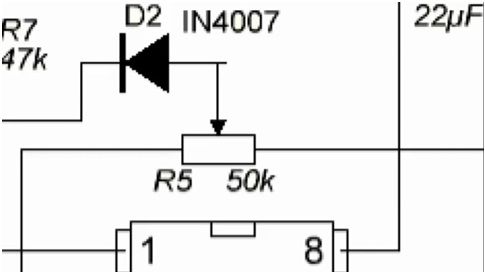
Применение УПП также позволяет снизить нагрузку на электросеть, поскольку в этом случае пусковой ток электродвигателя составляет 2 – 4 номинала тока двигателя, а не 5 – 7 номиналов, как при непосредственном пуске. Это важно при питании электроустановок от источников энергии ограниченной мощности, например, дизель-генераторных установок, источников бесперебойного питания и трансформаторных подстанций малой мощности
(особенно в сельской местности). После завершения пуска тиристоры шунтируются байпасом (обходным контактором) К, благодаря чему в течение времени Траб на тиристорах не рассеивается мощность, а значит, экономится электроэнергия.
При торможении двигателя процессы происходят в обратном порядке: после отключения контактора К угол проводимости тиристоров максимален, напряжение на обмотках электродвигателя равно сетевому за вычетом падения напряжения на тиристорах. Затем угол проводимости тиристоров в течение времени Тторм уменьшается до минимального значения, которому соответствует напряжение отсечки Uотс, после чего угол проводимости тиристоров становится равным нулю и напряжение на обмотки не подается.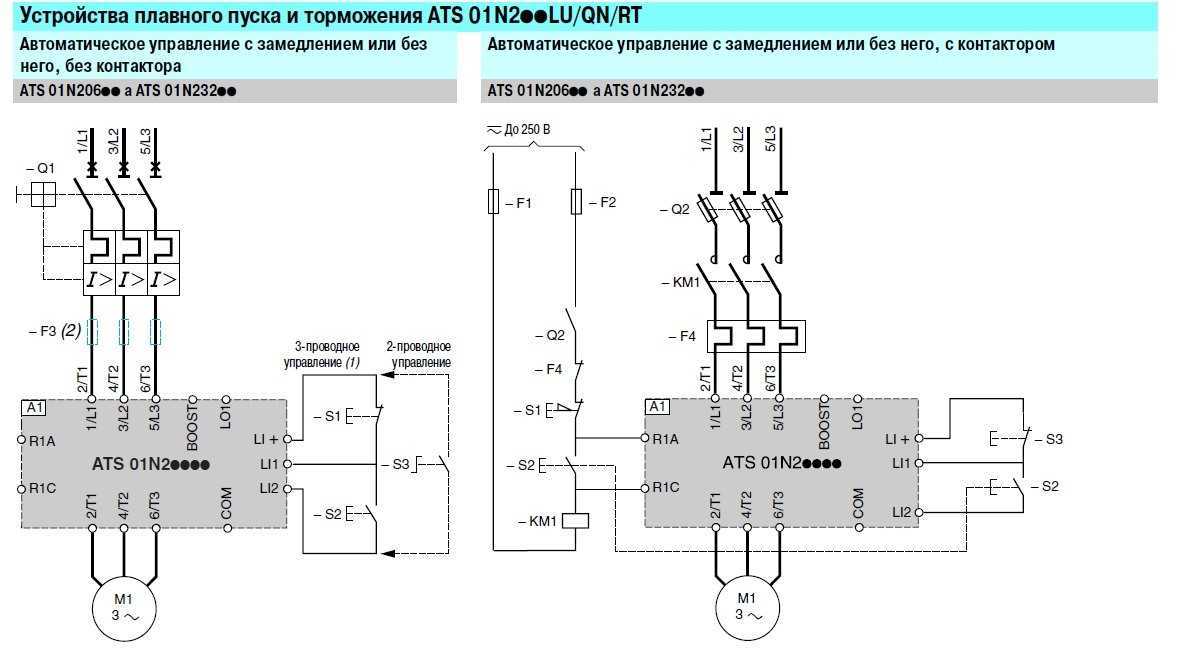 На рисунке 3 приведены диаграммы тока одной из фаз двигателя при постепенном увеличении угла проводимости тиристоров.
На рисунке 3 приведены диаграммы тока одной из фаз двигателя при постепенном увеличении угла проводимости тиристоров.
На рисунке 4 приведены фрагменты принципиальной электрической схемы УПП. Полностью схема приведена на сайте журнала. Для её работы требуется напряжение трех фаз А, В, С стандартной сети 380 В частотой 50 Гц. Обмотки электродвигателя при этом могут быть соединены как «звездой», так и „треугольником“.
В качестве силовых тиристоров VS1 – VS6 применены недорогие приборы типа 40TPS12 в корпусе ТО-247 с прямым током Iпр= 35 А. Допустимый ток через фазу составляет Iдоп= 2Iпр= 70 А. Будем считать, что максимальный пусковой ток составляет 4Iном, откуда следует, что Iном < Iдоп/4 = 17,5 А. Просматривая стандартный ряд мощностей электродвигателей, находим, что к УПП допустимо подключать двигатель мощностью 7,5 кВт с номинальным током фазы Iн= 15 А. В случае, если пусковой ток превысит Iдоп (по причине подключения двигателя большей мощности или слишком малого времени пуска), процесс пуска будет остановлен, поскольку сработает автоматический выключатель QF1 со специально подобранной характеристикой.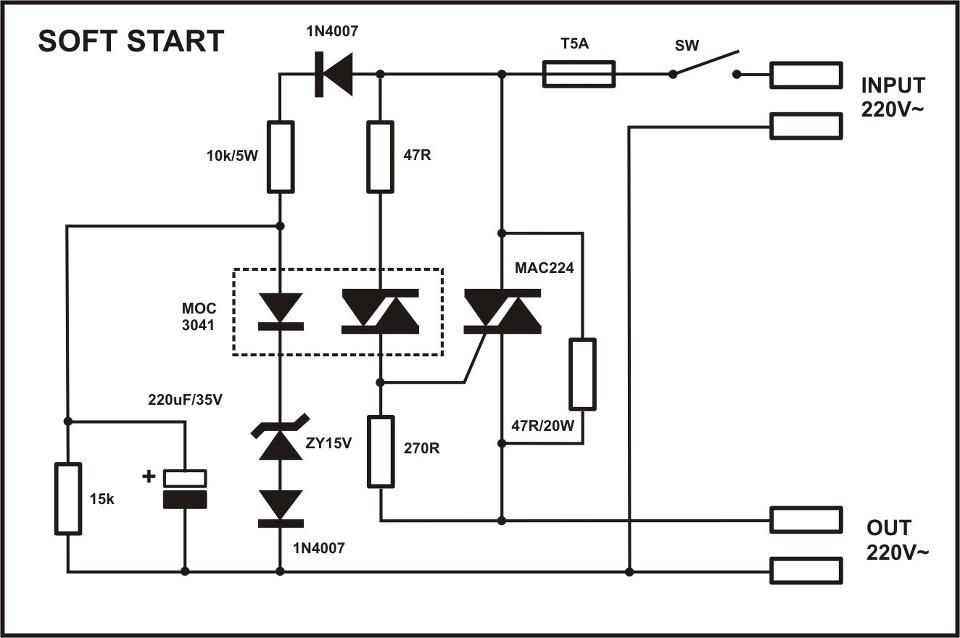
Параллельно тиристорам подключены демпфирующие RC-цепочки R48, C20, C21, R50, C22, C23, R52, C24, C25, предотвращающие ложное включение тиристоров, а также варисторы R49, R51 и R53, поглощающие импульсы перенапряжения свыше 700 В. Обходные реле К1, К2, К3 типа TR91-12VDC-SC-C с номинальным током 40 А шунтируют силовые тиристоры после завершения пуска.
Питание системы управления осуществляется от трансформаторного блока питания, запитанного от межфазного напряжения Uав. В блок питания входят понижающие трансформаторы TV1, TV2, диодный мост VD1, токоограничивающий резистор R1, сглаживающие конденсаторы С1, С3, С5, помехоподавляющие конденсаторы С2, С4, С6 и линейные стабилизаторы DA1 и DA2, обеспечивающие напряжение 12 и 5 В соответственно.
Система управления построена с применением микроконтроллера DD1 типа PIC16F873. Микроконтроллер выдаёт импульсы управления тиристорами VS1 – VS6 путём «зажигания» оптосимисторов ОРТ5-ОРТ10 (MOC3052). Для ограничения тока в цепях управления тиристоров VS1 – VS6 служат резисторы R36 – R47.
Диаграммы работы узла синхронизации приведены на рисунке 5. Если принять верхний график за сетевое напряжение Uав, то среднийграфик будет соответствовать напряжению на конденсаторе С17, а нижний – току через фотодиод оптопары ОРТ2. Микроконтроллер регистрирует поступающие на его входы синхроимпульсы, определяет наличие, порядок чередования, отсутствие «слипания» фаз, а также производит расчёт времени задержки импульсов управления тиристорами.
С помощью потенциометров R2, R3, R4 задаются параметры, соответствующие диаграмме работы УПП, приведённой на рисунке 2; соответственно R2 – Tпуск, R3 – Тторм, R4 – Uначи Uотс. Напряжения уставок с движков R2, R3, R4 поступают на входы RA2, RA1, RA0 микросхемы DD1 и преобразуются с помощью АЦП. Время пуска и торможения регулируется в пределах от 3 до 15 с, а начальное напряжение – от нуля до напряжения, соответствующего углу проводимости тиристора в 60 электрических градусов. Конденсаторы С8 – С10 – помехоподавляющие.
Команда «ПУСК» подаётся путём замыкания контактов 1 и 2 разъёма XS2, при этом на выходе 4 оптопары OPT1 появляется лог. 1; конденсаторы С14 и С15 производят подавление колебаний, возникающих вследствие „дребезга“ контактов. Разомкнутому положению контактов 1 и 2 разъёма XS2 соответствует команда „СТОП“. Коммутацию цепи управления запуском можно реализовать кнопкой с фиксацией, тумблером или контактами реле.
Силовые тиристоры защищены от перегрева термостатом B1009N с нормально-замкнутыми контактами, размещёнными на теплоотводе. При достижении температуры 80°С контакты термостата размыкаются, и на вход RC3 микроконтроллера поступает уровень лог. 1, свидетельствующий о перегреве.
Светодиоды HL1, HL2, HL3 служат индикаторами следующих состояний:
- HL1 (зелёный) «Готовность» – отсутствие аварийных состояний, готовность к запуску;
- HL2 (зелёный) «Работа» – мигающий светодиод означает, что УПП производит пуск или торможение двигателя, постоянное свечение – работа на байпасе;
- HL3 (красный) «Авария» – свидетельствует о перегреве теплоотвода, отсутствии или „слипании“ фазных напряжений.
Включение обходных реле К1, К2, К3 производится путём подачи микроконтроллером лог. 1 на базу транзистора VT4.
Программирование микроконтроллера – внутрисхемное, для чего используется разъём XS3, диод VD2 и микропереключатель Дж1. Элементы ZQ1, C11, C12 образуют цепь запуска тактового генератора, R5 и С7 – цепь сброса по питанию, С13 осуществляет фильтрацию помех по шинам питания микроконтроллера.
Элементы ZQ1, C11, C12 образуют цепь запуска тактового генератора, R5 и С7 – цепь сброса по питанию, С13 осуществляет фильтрацию помех по шинам питания микроконтроллера.
На рисунке 6 приведён упрощённый алгоритм работы УПП. После инициализации микроконтроллера вызывается подпрограмма Error_Test, которая определяет наличие аварийных ситуаций: перегрев теплоотвода, невозможность синхронизироваться с сетевым напряжением вследствие потери фазы, неверного подключения к сети или сильных помех. Если аварийная ситуация не фиксируется, то переменной Error присваивается значение «0», после возврата из подпрограммы зажигается светодиод „Готовность“, и схема переходит в режим ожидания команды „ПУСК“. После регистрации команды „ПУСК“ микроконтроллер производит аналого!цифровое преобразование напряжений уставок
на потенциометрах и расчёт параметров Тпуск и Uнач, после чего выдаёт импульсы управления силовыми тиристорами. По окончании пуска включается байпас. При торможении двигателя процессы управления выполняются в обратном
порядке.
Устройство плавного пуска для нагрузок переменного тока
Для больших индуктивных нагрузок переменного тока устройство плавного пуска является очень важной цепью. Устройство плавного пуска снижает первоначальную подачу питания на нагрузку и потенциально уменьшает электрические и механические удары по устройству. Специально моторы. Устройство плавного пуска также снижает скачки начального тока при любой нагрузке переменного тока. Мощность медленно подается на нагрузку, что снижает нагрузку на нагрузку. В этой статье мы научимся делать устройство плавного пуска для нагрузки переменного тока.
Отказ от ответственности: Электричество всегда опасно. Для работы с электричеством необходимы определенные навыки. Делайте работу на свой страх и риск. Автор не будет нести ответственность за любое неправильное использование или вредоносное действие или любую ошибку, которую вы сделаете. Содержание этого веб-сайта является уникальным и защищено авторским правом. Пожалуйста, не делайте никаких бессмысленных действий, копируя и заявляя, что это ваше. Большинство статей, опубликованных здесь, хранятся в открытом доступе, чтобы помочь вам. Берите знания бесплатно и пользуйтесь ими, но если вам интересно, вы можете купить готовые ресурсы, предлагаемые здесь. Если вам нужна помощь или руководство, не стесняйтесь комментировать ниже, автор постарается вам помочь. Также в статье могут быть аффилированные ссылки. Что никак не повлияет на вас в любом случае, но позволит автору с некоторой комиссией. Поэтому, пожалуйста, не принимайте это иначе. Спасибо.
Пожалуйста, не делайте никаких бессмысленных действий, копируя и заявляя, что это ваше. Большинство статей, опубликованных здесь, хранятся в открытом доступе, чтобы помочь вам. Берите знания бесплатно и пользуйтесь ими, но если вам интересно, вы можете купить готовые ресурсы, предлагаемые здесь. Если вам нужна помощь или руководство, не стесняйтесь комментировать ниже, автор постарается вам помочь. Также в статье могут быть аффилированные ссылки. Что никак не повлияет на вас в любом случае, но позволит автору с некоторой комиссией. Поэтому, пожалуйста, не принимайте это иначе. Спасибо.
Содержание
Объявления
Использование устройств плавного пуска:
Когда к источнику питания подключена большая нагрузка, на нагрузку поступает импульсный ток. Этот импульсный ток намного выше нормального тока нагрузки. Особенно для индуктивных нагрузок. Когда индуктор холодный или не находится под напряжением, он работает как короткое замыкание. Представьте себе такой индуктор:
Если на этот индуктор подать переменный ток, что произойдет? Через эту катушку индуктивности также будет протекать пусковой ток, известный как переходный ток.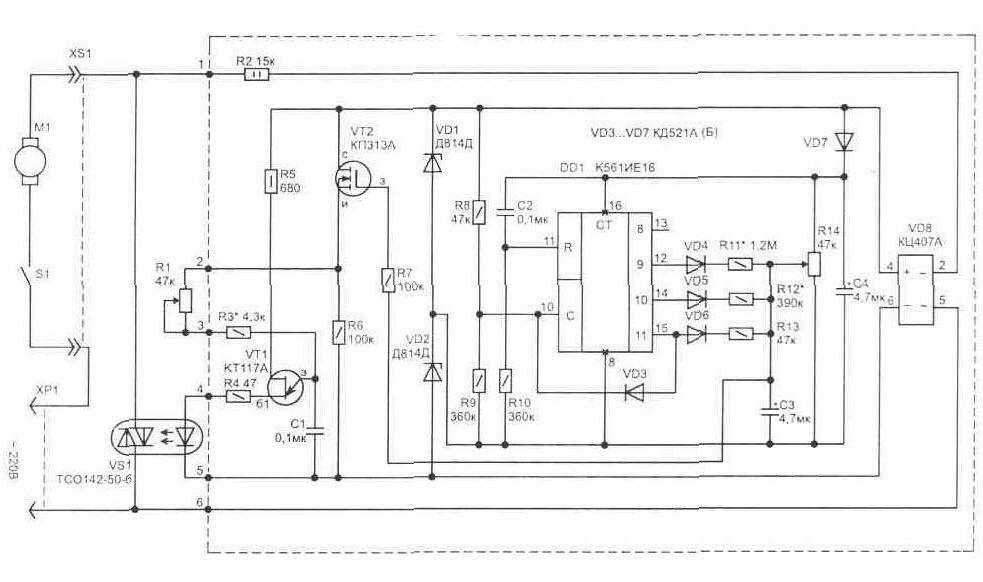 Почему? Когда индуктор не был под напряжением, он был холодным. В холодном состоянии сопротивление индуктора очень низкое. Вот почему, когда питание включено, пусковой ток протекает из-за этого пути с низким сопротивлением. Но когда катушка находится под напряжением из-за магнитного потока, она потребляет только установившийся ток, который довольно низок. Режим чтения об устройстве плавного пуска из Wiki.
Почему? Когда индуктор не был под напряжением, он был холодным. В холодном состоянии сопротивление индуктора очень низкое. Вот почему, когда питание включено, пусковой ток протекает из-за этого пути с низким сопротивлением. Но когда катушка находится под напряжением из-за магнитного потока, она потребляет только установившийся ток, который довольно низок. Режим чтения об устройстве плавного пуска из Wiki.
Этот пусковой ток может повредить систему, а также соединительные кабели. Вот почему при большой индуктивной нагрузке или при некоторых других типах больших нагрузок устройство плавного пуска значительно помогает снизить пусковой ток.
Для катушек индуктивности лучше всего работает устройство плавного пуска.
Типы устройств плавного пуска:
Устройство плавного пуска может быть разных типов. В некоторых старых системах для плавного пуска используются регулируемые трансформаторы и механизмы с редукторным двигателем. В некоторых системах используются симисторы, в некоторых — резисторы и реле.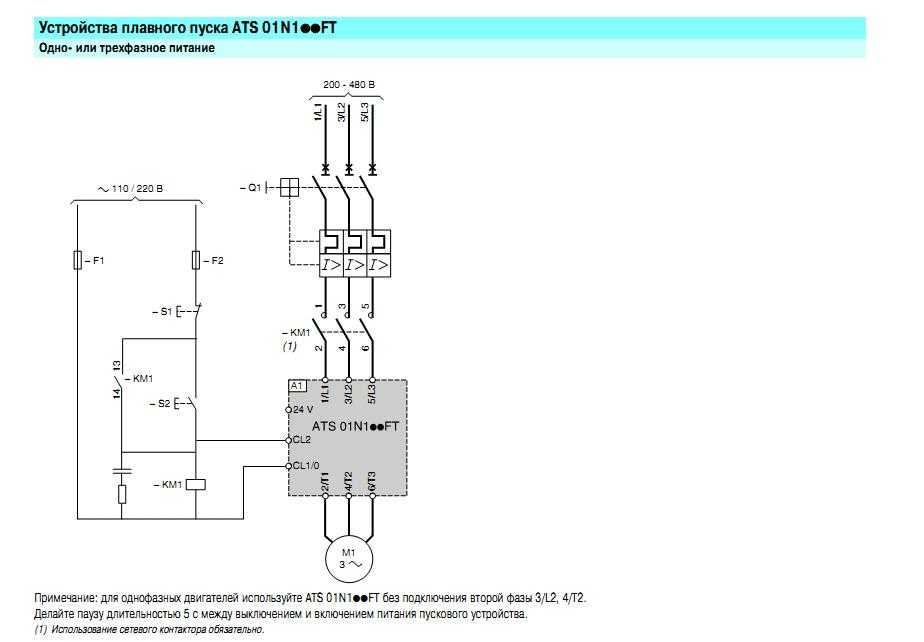 По конфигурации устройства плавного пуска можно разделить на:
По конфигурации устройства плавного пуска можно разделить на:
- Электромеханическое устройство плавного пуска
- Устройство плавного пуска на основе тиристора
- Устройство плавного пуска на основе выключателя задержки RLC
Электромеханическое устройство плавного пуска:
Этот метод является очень старым и использовался в старых системах, когда электроника не была столь привычной. . В этом типе системы они использовали переменные трансформаторы. Который работал как плавный пускатель, управляемый напряжением.
Переменный трансформаторВ настоящее время мы знаем это как вариатор. Подумайте об этом большом громоздком устройстве, которое в старину использовалось как устройство плавного пуска. В настоящее время после электроники тиристоры являются наиболее популярными устройствами для этой цели.
Устройство плавного пуска на основе тиристора:
Поскольку вы научились делать схему диммера переменного тока в моей предыдущей статье, вы знаете, как работает диммер переменного тока на основе тиристора. Если вы пропустили это, я попрошу прочитать это еще раз отсюда: « Схема диммера переменного тока с симистором ».
Если вы пропустили это, я попрошу прочитать это еще раз отсюда: « Схема диммера переменного тока с симистором ».
Теперь вы знаете, как работает тиристор для диммирования. Эту технологию диммера переменного тока можно использовать в качестве схемы плавного пуска. В устройстве плавного пуска нагрузка приводится в движение от максимального угла включения, чтобы обеспечить минимальное состояние переключения, а затем угол постепенно уменьшается от нуля до полного переключения.
Управление углом открытия тиристора для привода нагрузкиЭто очень простой метод создания устройства плавного пуска. Современные устройства плавного пуска разработаны на основе этой технологии. При большей мощности добавляются некоторые другие функции, такие как предотвращение короткого замыкания, обрыва фазы, замыкания на землю и т. д.
Современное устройство плавного пуска на основе тиристорного управления углом зажигания: ) метод используется некоторые нагрузки переменного тока должны использоваться электронные устройства плавного пуска, особенно большие нагрузки.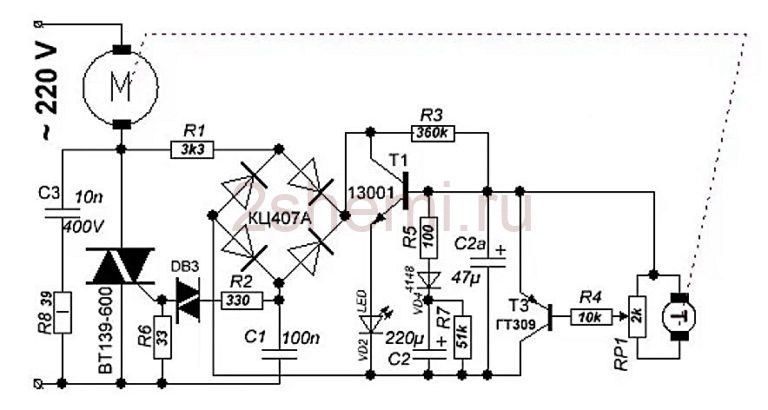
Устройство плавного пуска на основе выключателя задержки RLC:
Это самый простой из устройств плавного пуска. В этом типе схемы плавного пуска используется резистивное (R), индуктивное (L) или емкостное (C) устройство. Для небольших нагрузок этот тип плавного пуска очень популярен. В зависимости от характера нагрузки используется R, L или C. Я говорю что-то вроде этого:
Резистивный переключатель плавного пускаИли это:
Индуктивный переключатель плавного пускаИли даже это:
Емкостной переключатель плавного пускаПоследний не так популярен для плавных пускателей, и с использованием дросселя поперек переключатель тоже не годится. Потому что в качестве устройства плавного пуска должен использоваться большой индуктор. Но он используется в случаях сильного тока, особенно в схемах на основе SMPS. Он работает как механическая пружина, поглощающая вибрации.
Самый популярный в этом типе — использование резистора на переключателе и цепи задержки. Использование резистора делает устройство плавного пуска небольшим и экономичным.
Использование резистора делает устройство плавного пуска небольшим и экономичным.
Теперь переключатель задержки завершает резистивное устройство плавного пуска.
Принципиальная схема резистивного устройства плавного пуска:
Это схема переключателя с очень малой задержкой для резистивного устройства плавного пуска. Конденсатор C1 и зарядный резистор R1 образуют времязадающую RC-цепь, которая создает время задержки. Это время задержки можно рассчитать по формуле
Задержка = 1,1RC. Но лучше всего использовать переменный резистор в позиции R1. Затем настройте необходимое время. Резистор R3 работает как разрядный резистор для конденсатора C1. Когда выключатель питания выключен, этот разрядный резистор разряжает конденсатор С1. Есть еще один резистор (R4) на конденсаторе C2. Он также используется для разрядки конденсатора С2.
Так зачем нам использовать разрядные резисторы на конденсаторе? Представьте, что произойдет, если электричество отключат и через несколько секунд снова вернут к нему? Наш переключатель задержки не будет работать. Он будет включен напрямую, потому что конденсаторы уже заряжены, что включит транзистор. Но если мы разрядим конденсаторы, этого не произойдет. Каждый раз при отключении питания срабатывает наша схема задержки.
Он будет включен напрямую, потому что конденсаторы уже заряжены, что включит транзистор. Но если мы разрядим конденсаторы, этого не произойдет. Каждый раз при отключении питания срабатывает наша схема задержки.
Да, если питание вернется через секунды, это займет меньше времени, чем в первый раз, но задержки будет достаточно для формирования нашей схемы плавного пуска.
Тест резистивного устройства плавного пуска:
Здесь при симуляции в протеусе видно, как работает задержка.
Этот очень простой, но он очень помогает при различных индуктивных нагрузках плавно включаться. Теперь мы можем сделать это более контролируемым способом, используя наш механизм схемы диммера.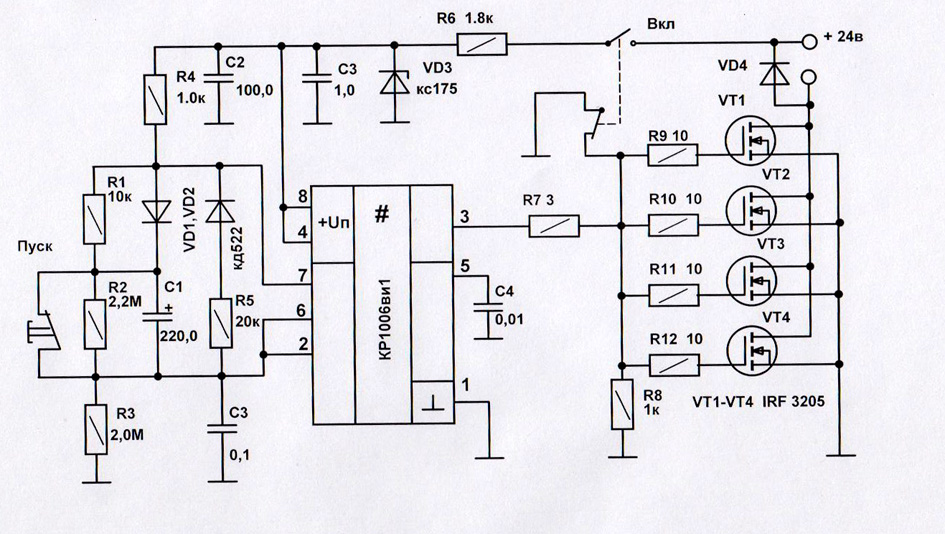 Если вы пропустили эту статью, посетите: « Сделать диммер переменного тока с помощью PIC12F675 и TRIAC ».
Если вы пропустили эту статью, посетите: « Сделать диммер переменного тока с помощью PIC12F675 и TRIAC ».
Устройство плавного пуска, контролирующее угол открытия симистора:
Как мы знаем, мы можем контролировать выходной сигнал симистора, управляя его углом открытия, и обеспечивать требуемый выходной сигнал (в % от входного сигнала) для нагрузки. Если мы используем этот угол открытия таким образом, чтобы в начале обеспечить наименьшую мощность нагрузки, а затем постепенно увеличивать мощность до полной на определенное время (около 2/3 секунд или 5 секунд максимум), тогда он будет работать как управляемый мягкий стартер.
Так почему же он называется управляемым устройством плавного пуска? Потому что мы можем контролировать каждый шаг. Если мы хотим контролировать свое время на полную мощность, мы можем. Если мы хотим передать определенную силу, мы можем. Даже если мы хотим интегрировать измерение тока или напряжения, мы можем это сделать. Вот почему его называют управляемым устройством плавного пуска.
Принципиальная схема управляемого устройства плавного пуска:
Здесь транзистор Q1, резисторы R4 и R5 используются для цепи детектора перехода через нуль. Сигнал подается на вывод INT микроконтроллера. Микроконтроллер генерирует синхронизирующий импульс для симистора, который подается на затвор симистора через оптопару MOC3021. Время задержки между сигналом перехода через нуль и сигналом запуска TRIAC медленно уменьшается. Таким образом, осуществляется плавный пуск.
Практический тест:
Примечание: Если у вас большая нагрузка и вы не создаете давление в TRIAC, вы можете использовать реле. Когда полный переключатель сделан, просто включите реле. Затем через некоторое время выключается строб-сигнал симистора. таким образом, TRIAC будет работать долго и будет отдыхать, когда нагрузка будет полностью включена.
Когда полный переключатель сделан, просто включите реле. Затем через некоторое время выключается строб-сигнал симистора. таким образом, TRIAC будет работать долго и будет отдыхать, когда нагрузка будет полностью включена.
Заключение:
В этой статье мы увидели, как работает устройство плавного пуска, и сделали два типа устройств плавного пуска. Для небольших нагрузок и там, где не требуется управляемый пуск, вы можете использовать устройство плавного пуска на основе резистивного выключателя с задержкой, которое очень мало и просто в изготовлении. А когда вам нужен контролируемый пуск, вы можете использовать управляемый плавный пускатель на основе TRIAC.
Надеюсь, этот проект был вам полезен. Если вы сделаете для себя, мне будет очень приятно. Везде, где вам нужна помощь, дайте мне знать. Пожалуйста, поделитесь этим проектом и подпишитесь на мой блог. Спасибо.
Для профессионального дизайна или помощи:
Чат в WhatsApp
Не забудьте подписаться на следующее обновление.
Также дайте мне знать, что вы хотите получить в качестве следующей статьи, комментарий ниже!
Ознакомьтесь с этим: 5 самых крутых мультиметров, которые вы можете купить
Нравится:
Нравится Загрузка…
Советы по питанию: Простая схема для реализации плавного плавного пуска изолированного преобразователя – Управление питанием – Технические статьи
Другие детали, обсуждаемые в сообщении: LM5025
Статья написана Manjing Xie
Большинству преобразователей постоянного тока требуется схема плавного пуска для ограничения пускового тока при запуске. Хотя плавный плавный пуск требуется для систем со сбросом при включении питания (POR), это сложно для изолированного преобразователя с контроллером на первичной стороне и ограниченным рабочим циклом или током.
На рис. 1 показан плавный пуск прямоходового преобразователя с плавным пуском рабочего цикла с первичной стороны. Стационарное выходное напряжение преобразователя составляет 12 В. Ток нагрузки 50 % применяется при 10 В, пороге POR системы. Как только нагрузка подается, выходной сигнал падает и вызывает отключение системы, вызывая несколько циклов включения питания системы. В конце плавного пуска выход превышает 10%, что нежелательно.
Стационарное выходное напряжение преобразователя составляет 12 В. Ток нагрузки 50 % применяется при 10 В, пороге POR системы. Как только нагрузка подается, выходной сигнал падает и вызывает отключение системы, вызывая несколько циклов включения питания системы. В конце плавного пуска выход превышает 10%, что нежелательно.
Рисунок 1: Выход прямого преобразователя во время запуска с нагрузкой 10 В
В этом посте я буду использовать простую схему для плавного плавного пуска изолированного преобразователя. Схема применяется к прямоходовому преобразователю с активным ограничением с LM5025 в качестве контроллера. На рис. 2 показана концепция плавного пуска на вторичной стороне.
Рис. 2. Схема плавного пуска на вторичной стороне для изолированного преобразователя
При первом приложении входа выход преобразователя (V OUT ) начинает возрастать. Конденсатор (С SS ) заряжается. Зарядный ток C SS (I SS ) протекает через резистор (R SS ). Когда I SS высокий, то V BE(on) /R SS . Q SS включается и начинает потреблять ток от узла компа на вторичной стороне (SEC COMP), тем самым сокращая рабочий цикл. Во время плавного пуска усилитель ошибки насыщается, и схема плавного пуска доминирует в контуре обратной связи. Преобразователь, C SS , R SS , Q SS и оптопара образуют замкнутый контур. Когда выход повышается до регулирования, усилитель ошибки начинает регулировать и I SS уменьшает. Q SS выключается.
Зарядный ток C SS (I SS ) протекает через резистор (R SS ). Когда I SS высокий, то V BE(on) /R SS . Q SS включается и начинает потреблять ток от узла компа на вторичной стороне (SEC COMP), тем самым сокращая рабочий цикл. Во время плавного пуска усилитель ошибки насыщается, и схема плавного пуска доминирует в контуре обратной связи. Преобразователь, C SS , R SS , Q SS и оптопара образуют замкнутый контур. Когда выход повышается до регулирования, усилитель ошибки начинает регулировать и I SS уменьшает. Q SS выключается.
Уравнение 1 показывает передаточную функцию от V OUT к току оптопары: часть к части. Чтобы стабилизировать эту схему, вставьте резистор, уменьшающий усиление (R E ) между эмиттером Q SS и землей, как показано на рис. 3. Увеличение R E может снизить усиление контура обратной связи во время запуска.
Рисунок 3: Добавление R E для стабилизации схемы плавного пуска в качестве приближения к уравнению 2:
я добавил к преобразователю схему плавного пуска со следующими параметрами:
- C нержавеющая сталь = 0,1 мкФ.
- R нерж. сталь = 100 кОм.
- R E = 1,18 кОм.
На рис. 4 показана кривая плавного пуска с этими параметрами схемы. Когда система начинает потреблять ток, схема плавного пуска прекращает потреблять ток от COMP, и рабочий цикл быстро увеличивается. Преобразователь продолжает плавный пуск после небольшого провала, вызванного переходным процессом нагрузки.
Рисунок 4. Форма сигнала плавного пуска схемы плавного пуска, показанная на рисунке 3
На рис. 4 также видно, что после приложения нагрузки в коммутационном узле преобразователя (ВСП) возникает дополнительный всплеск напряжения. На рис. 5 показан увеличенный сигнал. Очевидно, что система колеблется на частоте 9,5 кГц.
На рис. 5 показан увеличенный сигнал. Очевидно, что система колеблется на частоте 9,5 кГц.
Рис. 5: Увеличенная кривая плавного пуска со схемой плавного пуска
Контроллер в этой конструкции представляет собой регулятор напряжения. Силовой каскад имеет перепад фаз на 180 градусов из-за двойных полюсов. Необходимо добавить ноль для повышения стабильности; Вы можете сделать это, добавив конденсатор (C E ), параллельно R E . Чтобы добавить 45 градусов к запасу по фазе, я поместил ноль на 9,5 кГц, измеренную частоту колебаний. При R E = 1,18 кОм я добавил конденсатор на 15 нФ.
Рис. 6. Схема плавного пуска с повышенной стабильностью
На рис. 7 показана форма сигнала запуска при C E = 15 нФ. Колебание устраняется. Общее время плавного пуска составляет 50 мс.
Рис. 7: Форма волны плавного пуска с C E = 15 нФ
Во время плавного пуска типичный ток диода оптопары (I opto_D ) составляет от 1,2 мА до 0,8 мА.