Подключение двигателя стиральной машинки, реверс, регулятор оборотов
В стиральных машинах чаще всего из строя выходит автоматика, на втором месте подшипники и резинотехнические изделия. Двигатель – самый надежный узел, его используются при изготовлении различных домашних станков. Но для этого надо уметь изменять направление вращения и регулировать скорость.Что требуется
- Тумблер с двумя группами контактов 220 В 15 А, приобрести его можно на Али Экспресс.
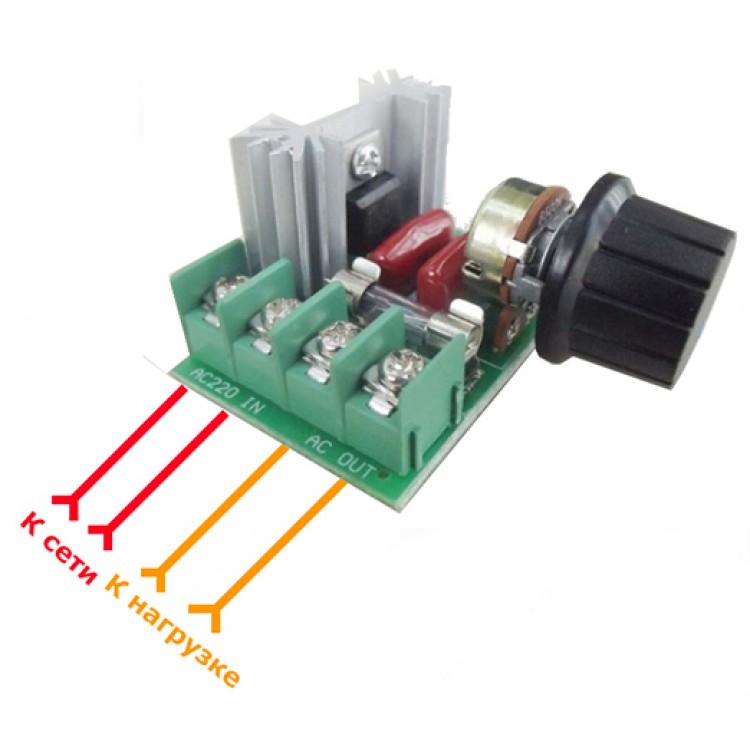
- Регулятор оборотов 400 Вт 220 В 50 Гц, также берите на Али Экспресс.
- Электродвигатель от автоматической стиральной машинки, подойдет почти любой марки.
- Отрезки проводов различного цвета, желательно синего (ноль) и коричневого (фаза).
- Потребуется изолента, для установки мощного радиатора купите новый и тюбик теплопроводящей пасты.
- Для проверки схемы соединения рекомендуется пользоваться обыкновенным тестером или хотя бы индикатором.


Подключение двигателя
Внимательно осмотрите клеммники снятого двигателя. На нем есть шесть выводов: два контакта идут к датчику оборотов (таходатчику) и по два контакта с обмоток ротора и статора.
Тахометр нам не нужен, его не трогаем, надо подключить только двигатель.
Все однофазные двигатели такого типа подключаются одинаково. Выход обмотки статора надо присоединить к входу обмотки ротора. Оставшиеся два конца присоединяются к нулю и фазе. Нет разницы, какая именно обмотка будет первой, а какая второй.
Определите выходы обмоток на разъеме. Пользоваться надо тестером, один контакт постоянно держите на клемме, а второй по очереди прикладывайте к остальным. Если прибор показал короткое замыкание, то две клеммы присоединены к одной обмотке.
В нашем случае к одной обмотке подключен нижний и второй сверху контакты, а ко второй клемма над нижним и третья сверху. Соответственно, нам надо перемычкой соединить второй и третий верхние контакты.
 Сделайте перемычку и выполните соединение. Для гарантии опять прозвоните, теперь у вас короткое должно показывать между двумя оставшимися клеммами.
Сделайте перемычку и выполните соединение. Для гарантии опять прозвоните, теперь у вас короткое должно показывать между двумя оставшимися клеммами. К двум оставшимся присоедините напряжение 220 В, если все в норме – двигатель начнет вращаться.
Подключение реверса
Как выше упоминалось, для изменения направления вращения необходимо поменять местами подключения одной из обмоток между собой.
И двигатель начнется вращаться в другую сторону. Проверьте правильность соединения, поменяйте местами провода на клеммнике согласно описанной схеме, включите напряжение. Направление вращения двигателя должно измениться на противоположное.
Контакт, на который подавалась фаза, надо соединить со входом второй обмотки. Напряжение попадает на освободившуюся клемму, положение ноля не меняется. Изменение порядка подключения можно делать щелчками тумблера.
Переверните тумблер вверх ногами, на днище есть обозначения каждого выхода и схема их соединения в левом и правом положении переключателя.

Для облегчения понимания нарисуйте элементарную схему соединения: две обмотки и два контакта переключателя. Средние контакты по очереди присоединяются/отсоединяются к двум боковым. Подключение элементарное.
Одну обмотку соедините с крайним нижним контактом и свяжите ее перемычкой с крайним верхним. Вторую обмотку подключите к средней клемме, пусть таким образом в нашем примере будет присоединена обмотка статора.
Теперь сталось подключить ротор. Один контакт тумблера должен подключаться к выходу обмотки ротора, а второй напрямую к нулевому проводу питания.
Если все понятно, то приступайте к соединению. Сделайте по диагоналям перемычки между крайними клеммами. Один средний вывод тумблера подключается к нулю, а второй ко второй обмотке.
Присоедините все провода и еще раз проверьте правильность схемы. Средние контакты: один к нулю питания, другой к обмотке статора. Второй конец этой обмотки подключается сразу к фазе питания (коричневый провод).
Контакты по диагоналям должны иметь перемычки, провода от них идут на вторую обмотку (ротора).
 Перед включением обязательно проверьте тестером изменения короткого замыкания при переключении тумблера.
Перед включением обязательно проверьте тестером изменения короткого замыкания при переключении тумблера.Тщательно заизолируйте контакты, проверьте функциональность двигателя. При переключении направление вращения должно меняться. Категорически запрещается менять направление движения до полной остановки ротора.
Регулятора оборотов, моя доработка
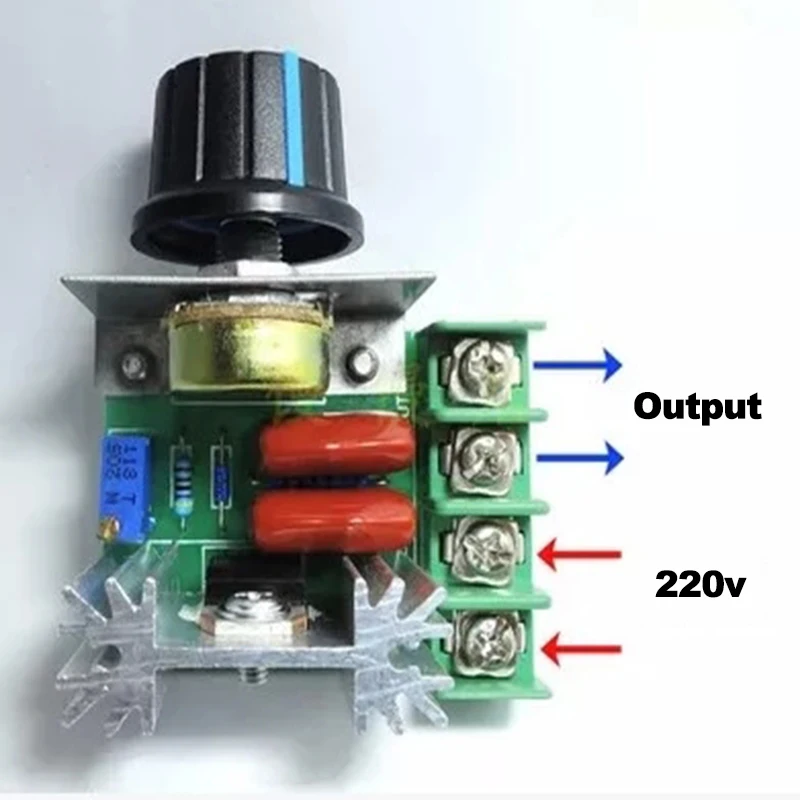
Если вы покупали недорогую китайскую продукцию, то надо обязательно сделать ревизию устройства. Достаньте из корпуса начинку и обратите внимание на симистор. В лучшем случае на нем очень маленький радиатор, не могущий эффективно отводить тепло. В худшем случае вообще ничего нет.
На новом радиаторе нарежьте резьбу М3, отрегулируйте его длину по размерам корпуса. Намажьте поверхность симистора термопастой и закрепите подготовленный радиатор. Соберите регулятор.
Подключите регулятора
Осмотрите устройство. Сзади на корпусе есть планка с разъемами и штекер с клеммами. Каждый контакт подписан.

Найдите на входе ноль, фазу и землю (если у вас в доме есть заземление). К ним подключается питание, в нашем случае ноль и фаза (земли нет).
Теперь следует найти выход ноля и фазы с регулятора. На крышке должна быть подробная схема с указанием назначения каждого выходного провода и его цвета.
На купленном регуляторе желтый – земля, два синих – на датчик тахометра, красный – фаза. Белый и зеленый взаимозаменяемые, но для этого надо менять положение перемычки. В нашем случае задействован зеленый. Определяется соединение прозванием выводов тестером.
Подключите синие провода к таходатчику на клеммнике двигателя. На примере к средней клемме тумблера присоединен ноль (зеленый), а к свободному контакту обмотки фаза (коричневый). Желтые провода на клеммнике присоединены к тахометру. Подайте напряжение на регулятор скорости и проверьте работу двигателя на всех режимах и скоростях.
На корпусе устройства есть специальное отверстие для регулировки режимов вращения переменным резистором.
 С его помощью меняется шаг изменения оборотов, вращение ротора будет начинаться не рывком, а почти с нуля. Выставьте нужные режимы.
С его помощью меняется шаг изменения оборотов, вращение ротора будет начинаться не рывком, а почти с нуля. Выставьте нужные режимы.Заключение
Любые электромонтажные работы следует делать в строгом соответствии с ПУЭ. Если вы не можете расшифровать эти три буквы без помощи интернета, то не стоит рисковать своим здоровьем.
Смотрите видео
Регулятор оборотов электродвигателя: назначение, принцип работы, подключение
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
 Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
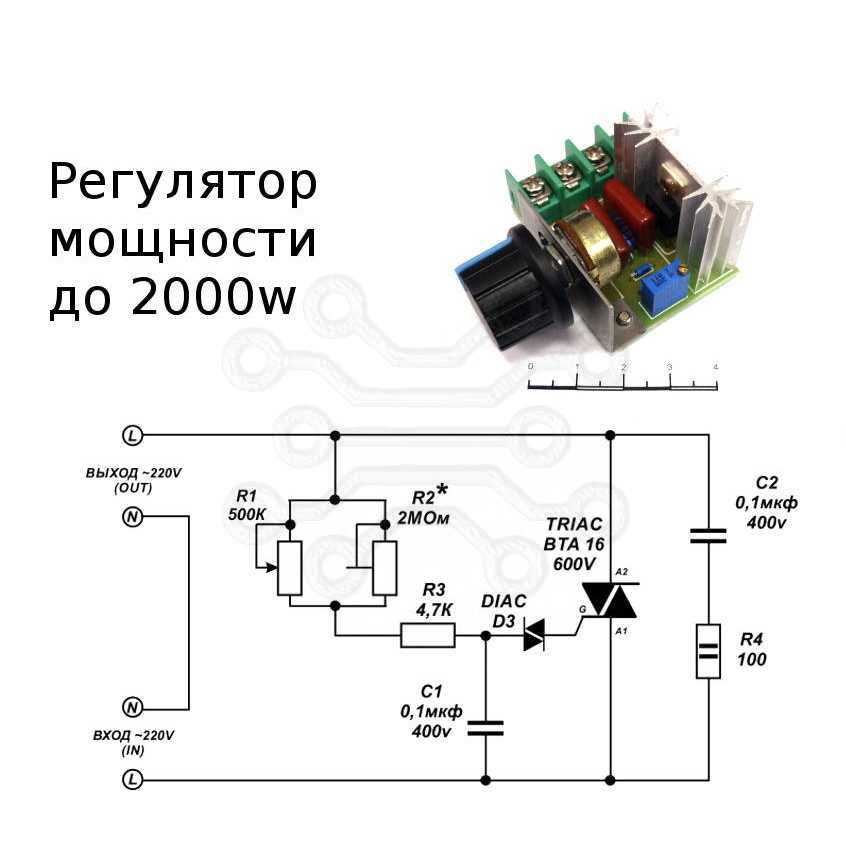
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
 Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.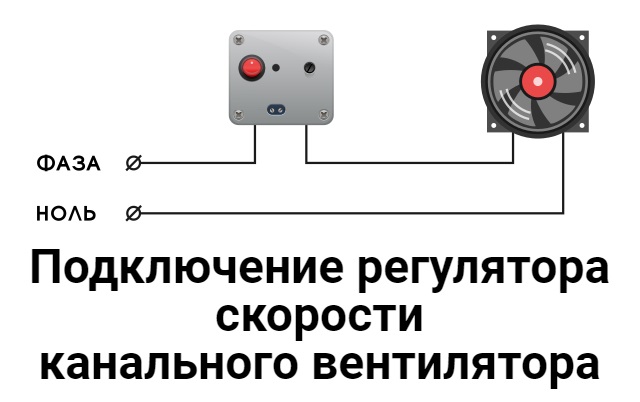
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
Схема подключения регулятораДалее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
Проверьте цветовую маркировкуЕсли все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Регулировка оборотов двигателя от стиральной машины
Регулировка оборотов двигателя стиральной машины может потребоваться любому домашнему самоделкину, который решит приспособить деталь отслужившей помощницы.
Простое подключение двигателя стиральной машины к питанию не дает много проку, поскольку он выдает сразу максимальные обороты, а ведь многие самодельные приборы требуют увеличения или уменьшения оборотов, причем желательно без потери мощности.
Сначала подключим
Прежде чем регулировать обороты двигателя стиральной машины, его нужно правильно подключить. Коллекторные двигатели от стиральных машин автомат имеют несколько выходов и многие начинающие самоделкины путают их, не могут понять, как осуществить подключение. Расскажем обо всем по порядку, а заодно и проверим работу электродвигателя, ведь существует же вероятность, что он вовсе неисправен.
- Для начала нужно взять двигатель от стиральной машины, покрутить его и найти катушки возбуждения или башмаки, от которых должно идти 2, 3 и более проводов. Башмаки выглядят примерно так, как показано на рисунке ниже.
- Берем омметр, выставляем тумблер на минимальное сопротивление и начинаем поочередно звонить все выходы. Наша задача выбрать из всех выходов катушки возбуждения 2, у которых значение сопротивления больше всех, если их всего два, то ничего выбирать не нужно.
- Далее нужно найти коллектор двигателя и щетки, от которых также будут идти 2 провода. В данном случае выхода будет только два, если их больше, значит, вы что-то перепутали или один из проводов банально оторван.
- Следующая группа выходов, которые нам позарез нужно обнаружить – это выходы таходатчика. В ряде случаев провода, идущие от таходатчика, можно заметить прямо на корпусе двигателя, но иногда их прячут в недра корпуса и тогда, чтобы подключиться, приходится частично разбирать двигатель.
К сведению! Таходатчики, имеющие два выхода, легко прозваниваются омметром. А вот аналогичные детали с тремя выходами не звонятся ни по одному направлению.
- Далее берем один провод, идущий от коллектора, и соединяем с одним из проводов катушки.
- Второй провод коллектора и второй провод катушки подключаем к сети 220 В.
- Если нам нужно поменять направление вращения якоря, то мы просто меняем местами подключаемые провода, а именно первый провод коллектора и первый провод катушки включаем в сеть, а вторые провода соединяем между собой.
- Отмечаем ярлычками провода катушки, таходатчика и коллектора, чтобы не перепутать и производим пробный пуск двигателя.
Если пробный запуск прошел успешно, а именно, двигатель плавно набрал обороты без заеданий и рывков, щетки не искрили, можно приступать к подключению двигателя стиральной машины через регулятор оборотов. Существует множество схем подключения двигателя через регулятор, как и схем самого регулятора, рассмотрим два варианта.
Подключим через регулятор напряжения
Простейший вариант регулировки электродвигателя стиральной машины – использование любого регулятора напряжения (диммера, гашетки от дрели и прочего). Смысл регулировки в том, что на двигатель подается сначала максимальное напряжение, и он вращается с максимальной скоростью. Поворачивая тумблер диммера, мы уменьшаем напряжение, и двигатель соответственно начинает снижать обороты. Схема подключения следующая:
- один провод катушки соединяем с одним проводом якоря;
- второй провод катушки подключаем к сети;
- второй провод якоря соединяем с диммером, а второй выход диммера подключаем к сети;
- производим пробный пуск двигателя.

Проверяем, как работает двигатель на минимальной мощности. Вы можете убедиться, что даже на минимальной мощности обороты без нагрузки внушительны, но стоит только прислонить деревянный брусочек к вращающейся оси, и двигатель тут же останавливается. Каков вывод? А вывод таков, что данный способ регулировки оборотов электродвигателя стиральной машины приводит к катастрофической потере мощности при уменьшении напряжения, что неприемлемо, если вы собираетесь делать из двигателя какую-то самоделку.
Важно! При запуске двигателя стиральной машины соблюдайте технику безопасности. Обязательно закрепите двигатель перед пуском, кроме того не стоит прикасаться руками к вращающимся элементам.
Изначально мы ставили задачу научиться своими руками регулировать обороты двигателя стиральной машины без потери или с минимальной потерей мощности, но возможно ли это? Вполне возможно, просто схема подключения несколько усложнится.
Через микросхему
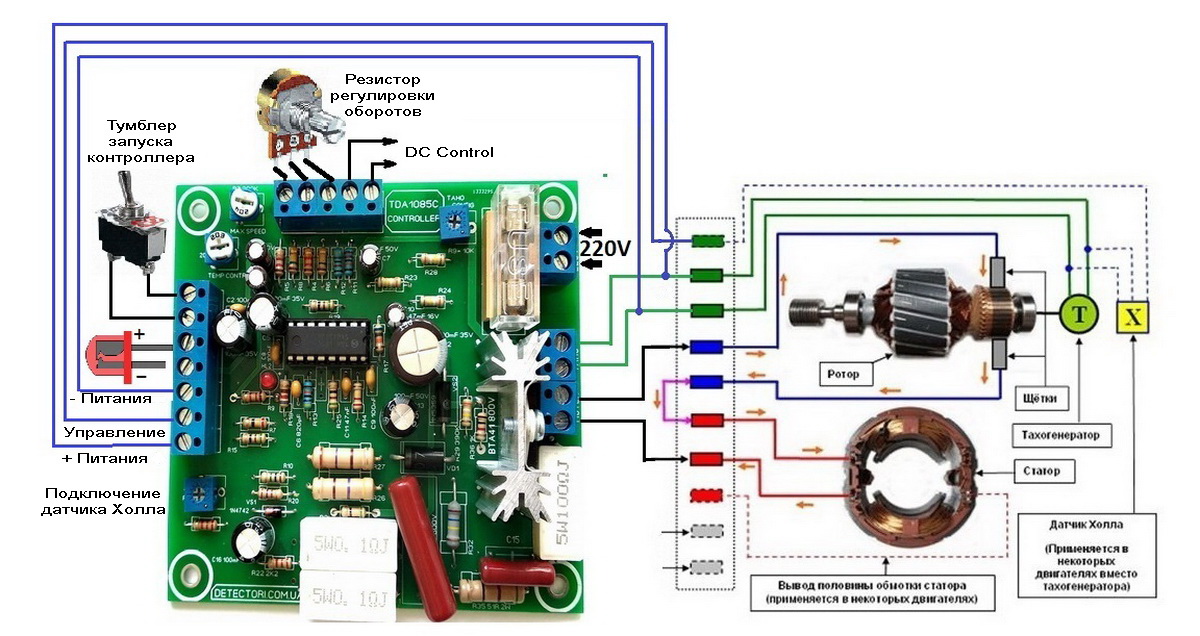
Пришло время вспомнить про таходатчик и его выходы, которые мы на двигателе нашли, но до поры отставили в сторону.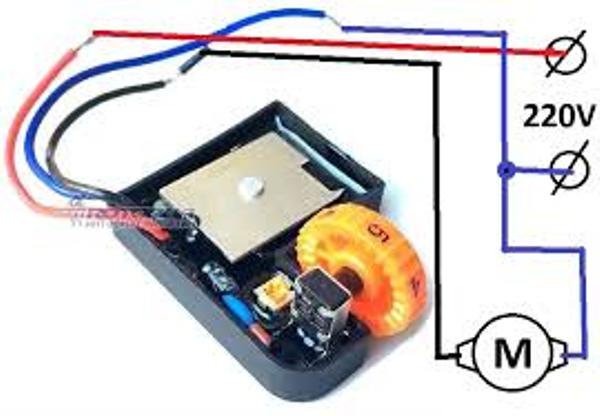 Именно таходатчик поможет нам подключить двигатель стиралки и регулировать его обороты без потери мощности. Сам таходатчик управлять двигателем не может, он лишь посредник. Реальное управление должно осуществляться посредством микросхемы, которая соединяется с таходатчиком двигателя, обмоткой и якорем и запитывается от сети 220 В. Принципиальную схему вы можете видеть на рисунке ниже.
Именно таходатчик поможет нам подключить двигатель стиралки и регулировать его обороты без потери мощности. Сам таходатчик управлять двигателем не может, он лишь посредник. Реальное управление должно осуществляться посредством микросхемы, которая соединяется с таходатчиком двигателя, обмоткой и якорем и запитывается от сети 220 В. Принципиальную схему вы можете видеть на рисунке ниже.
Что происходит с двигателем, когда мы подключаем его к сети через эту микросхему? А происходит следующее, мы можем запустить двигатель своими руками на максимальных оборотах, а можем, повернув специальный тумблер обороты уменьшить. Даем внезапную нагрузку двигателю, подставив под вращающийся шкив деревянный брусочек. На долю секунды обороты падают, но потом снова восстанавливаются, несмотря на нагрузку.
Дело в том, что таходатчик определяет понижение оборотов из-за возникшей нагрузки и сразу же подает сигнал об этом на управляющую плату. Микросхема, получив сигнал, автоматически добавляет мощность, выравнивая, таким образом, обороты двигателя. Мечта самоделкина, как говорится, сбылась. При наличии такой схемы подключения из двигателя стиральной машины можно сделать и зернодробилку и дровокол и много других полезных вещей.
Мечта самоделкина, как говорится, сбылась. При наличии такой схемы подключения из двигателя стиральной машины можно сделать и зернодробилку и дровокол и много других полезных вещей.
Подводя итог нашего повествования, ответим еще на один резонный вопрос, который может возникнуть у читателя: где взять такую плату? Можно собрать на основе схемы и списка деталей, которые мы прилагаем к настоящей статье, а можно заказать в готовом виде у специалистов. Благо в сети предложений на этот счет достаточно. Искать нужно схему TDA 1085.
Что такое регулятор оборотов?
Определение
Регуляторы оборотов — в англоязычном сообществе называются — Electric Speed Controller (электронный контроллер скорости) или сокращенно — ESC. Основная задача ESC – передача энергии от аккумулятора к бесколлекторному мотору. Потребность в их применении возникла вследствие некоторых особенностей БК — мотора. Вкратце говоря, аккумулятор отдает постоянный ток, а бесколлекторный мотор принимает трехфазный переменный ток.
Потребность в их применении возникла вследствие некоторых особенностей БК — мотора. Вкратце говоря, аккумулятор отдает постоянный ток, а бесколлекторный мотор принимает трехфазный переменный ток.
Принцип работы
Связь с остальными компонентами мультикоптера.
На вход ESC подается напряжение с аккумулятора и сигналы от полетного контроллера, а на выход регулятор отдает управляющее напряжение для привода. Соответственно регулятор должен обеспечивать:
- Совместимость с полетным контроллером.
- Максимальный ток для мотора (рассчитывается из спецификаций мотора и пропеллера) плюс 20 – 30%.
- Потребление тока меньше, чем ток, отдаваемый аккумулятором поделенный на количество ESC.
*Простейшая схема подключения.
Какие регуляторы бывают?
BEC и UBEC
Дополнительно к основной функции, регуляторы оборотов могут так же передавать питание к другим узлам дрона: полетному контроллеру, сервоприводам и так далее. Это достигается внедрением в регулятор блока исключения батареи — Battery Eliminator Circuit (далее как — BEC).
Это достигается внедрением в регулятор блока исключения батареи — Battery Eliminator Circuit (далее как — BEC).
Использование BEC значительно упрощает конструкцию дрона, однако такая схема обладает рядом минусов. Блок исключения батареи может перегреваться при больших перепадах напряжения и больших нагрузках. К тому же регуляторы оборотов с BEC, как правило, стоят дороже, чем регуляторы без блока.
Согласитесь, логичнее и дешевле было бы сделать отдельно ESC и отдельно один BEC. Такое решение есть и называется оно универсальный блок исключения батареи (Universal Battery Eliminator Circuit, далее как — UBEC).
Преимущества UBEC
UBEC — подключается напрямую к аккумулятору и питает нужный узел дрона. Преимущества такого подхода весьма существенны:
- Регуляторы оборотов будут меньше перегреваться, поскольку из них будет исключен BEC
- UBEC обладают большим коэффициентом полезного действия
- Следовательно из предыдущих двух пунктов UBEC способен отдавать больший ток с меньшим риском
- Отсутствие переплаты за несколько лишних BEC, располагающихся в ESС. Для некоторых полетных контроллеров крайне не рекомендуется подключать больше одного ESC BEC
- Меньший вес регуляторов
 Для некоторых полетных контроллеров крайне не рекомендуется подключать больше одного ESC BEC
Для некоторых полетных контроллеров крайне не рекомендуется подключать больше одного ESC BECВиды BEC и их преимущества
BEC бывают двух видов: линейные (LBEC) и импульсные (SBEC).
- Линейный преобразует энергию в тепло, а при перегреве отключается. Что может приводить к неприятным результатам: в лучшем случае коптер не сможет взлететь, а в худшем — неконтролируемое падение. В связи с чем стал применяться в сборке с сервоприводами, которые в свою очередь не потребляют много тока, не позволяя блоку перегреваться.
- Импульсный регулирует напряжение быстрым включением и выключением питания, такой подход исключил перегрев, повысил выходную мощность, и позволил достигать КПД 90%, а также импульсные BEC выигрывают у линейных в весе. Возникающие в цепи помехи, которые отрицательно сказываются на работе радио аппаратуры, исключаются добавлением LC — фильтра.
Учитывая то, что многие производители устанавливают на свои UBECLC фильтры (а, если фильтра все-таки нет, то его можно дешево купить и легко установить), профессионалы используют в своих коптерах именно регуляторы SBEC.

Программное обеспечение ESC
Поскольку регулятор оборотов выполняет некоторые преобразования с высокой частотой и может быть настроен на различные режимы работы для него пишут отдельный софт, называемый прошивкой. Это позволяет исправлять прошлые ошибки в алгоритмах управления, создавать более совершенные прошивки (и тем самым, например, уменьшать расходы аккумулятора на среднем газу) и производить гибкие настройки. В коптерах известных компаний типа DJI смена ПО регулятора происходит автоматически при помощи полетного контроллера.
Внимание! Перезапись ПО для регуляторов скорости может повлечь за собой поломки дрона различного характера, а так же снятие с гарантийного обслуживания! Помните, что вы делаете это на свой страх и риск!
Как сменить ПО?
Сменить программное обеспечение регулятора можно несколькими способами:
- Используя специальную плату управления
- Используя полетный контроллер
- Используя ASP программатор
Третий вариант проще и в настоящее время активно внедряется в новые модели.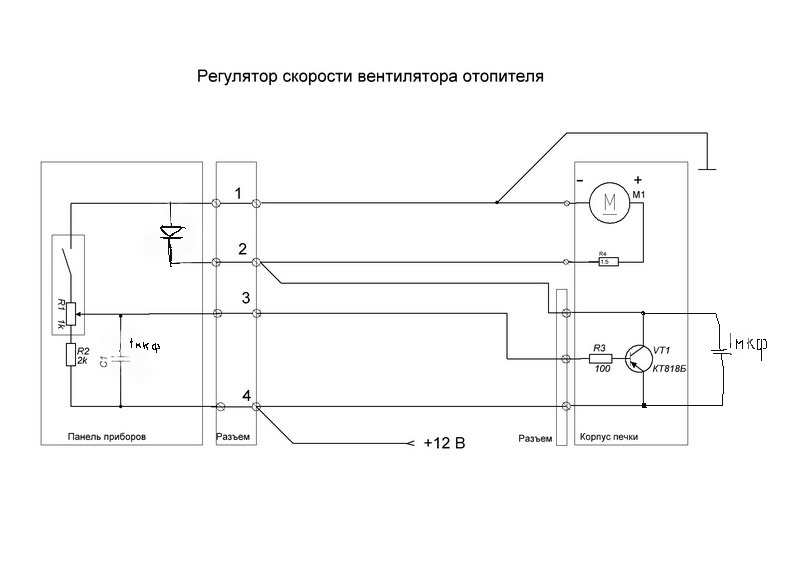
Выбор регулятора оборотов
Исходя из всего вышеперечисленного, можно выделить особые критерии выбора регулятора оборотов для дрона:
- Совместимость с полетным контроллером. Полетный контроллер должен поддерживать BEC и прошивку ESC.
- Совместимость со спецификациями мотора и аккумулятора.
- Наличие или отсутствие BEС и его тип (LBEC или SBEC).
- Теплоотвод и герметичность.
Китайцы могут. Установил их регулятор оборотов на двигатель стиральной машины автомат. Как это было рассказываю | Сантехник – Тимофей Михайлов
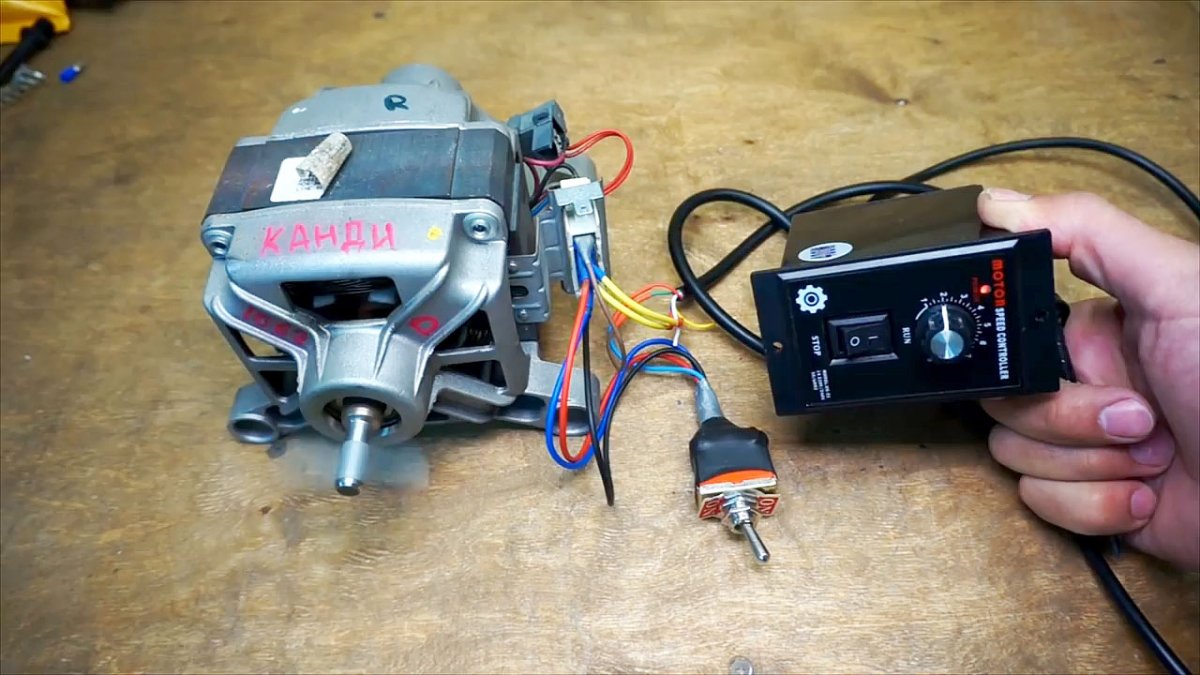
Чем бы солдат не занимался лишь бы заколебался. Или дурная голова рукам покоя не дает. И это все про меня, дорогой читатель. В прошлый раз подключал двигатель от стиральной машины автомат, напрямую к напряжению 220 V. От этого обороты на валу были очень большими в среднем, по расчетам 13000 об. мин. Их как-то необходимо уменьшать, для этого случая, за ранее заказал в Китае регулятор.
На своем борту он имеет кнопку выкл\вкл. Регулировочный “пиптик”. Так же имеется схема подключения. На корпусе в наличии колодка для соединения с проводами питания 220V. А так же кабель с выводами для подключения двигателя.
Регулировочный “пиптик”. Так же имеется схема подключения. На корпусе в наличии колодка для соединения с проводами питания 220V. А так же кабель с выводами для подключения двигателя.
Для любознательных товарищей разобрал корпус регулятора оборотов, любуйтесь.
Честно говоря в электронике не разбираюсь, я ж сантехник, но думаю что спаянно неплохо. А как вы считаете? Хватит молчать напиши комментарий.
Ни чего сложного в этом нет. У меня получилось.
Провод питания 220 V зажимаем в слотах с обозначением AC, AC , полярность соблюдать не нужно. Это ж переменый ток.
Далее переходим к концу с шестью выводами. Смотрим на схему по цветам и делаем выводы. Желтый провод это заземление. Его удаляем.
Два провода, в моем случае это красный и зеленый идет на питание электродвигателя. Его подключаем в место куда подходило питание напрямую. Для тех кто пропустил как запустить двигатель и откинуть лишние провода, статья –здесь.
Для того чтоб регулятор знал какую скорость развивает ротор, его нужно подключить к тахометру, который имеется с торца силовой установке. Проследить ее выходы на колодке не сложно. К ним подключаем два синих проводка, через наращенный проводок.
Оставшийся белый проводок отрезаем и за изолируем. Нам он не нужен.
Уряяя. Усе готово. Теперь проводим испытание. Включаем питание и смотрим на результат.
Обороты действительно регулируются от мала до велика. При самых низких оборотах вал вращается если даже к нему приложить усилия. Это говорит о том что регулятор поддерживает мощность движка.
Осталось только сформировать для него самоделку. Ссылка на регулятор здесь. Полезная информация? Поставь палец вверх, буду при много благодарен.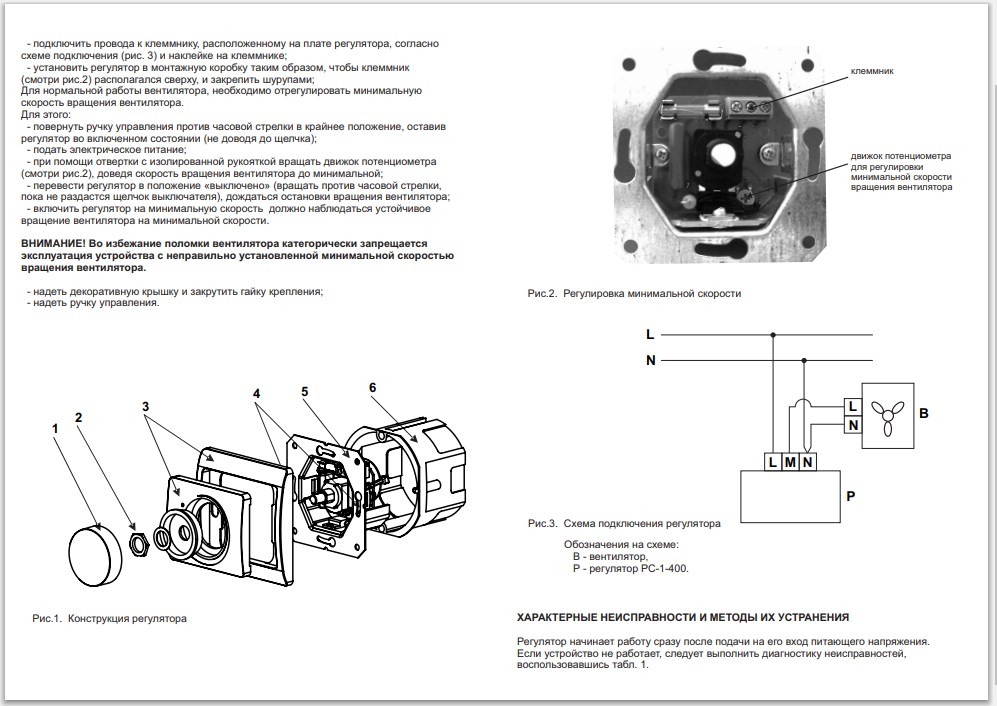
Как подключить регулятор скорости вентилятора своими руками
Вытяжные вентсистемы широко применяются для организации комфорта в жилых и подсобных помещениях. Чаще всего, вытяжки устанавливаются в туалетных и ванных комнатах, а также на кухне. Простейший способ подключения вентилятора подразумевает два положения – включено и выключено. В туалете иногда применяется выключатель с датчиком присутствия — это сэкономит электроэнергию в случае, если вы постоянно забываете его выключить.
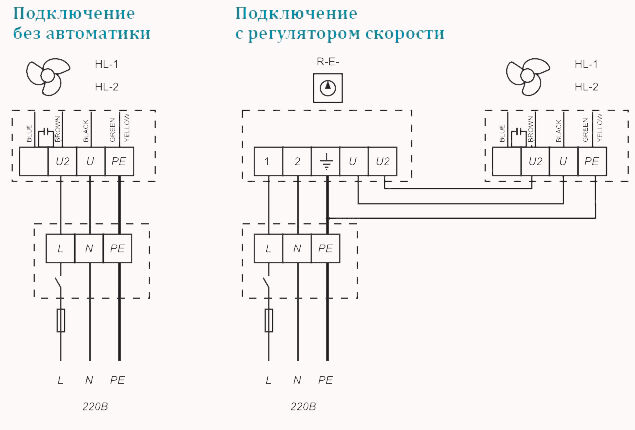
Для повышения акустического комфорта (вентилятор не обязательно должен постоянно работать на полную мощность), применяются регуляторы скорости вращения.
ВАЖНО! Перед покупкой вентилятора уточните у продавца, рассчитан ли его двигатель на работу с контроллером оборотов.
Техническая реализация управления скоростью вращения вентилятора:
- изменение частоты переменного тока двигателя;
- изменение величины питающего напряжения.
Контроллер частоты имеет ряд важных преимуществ.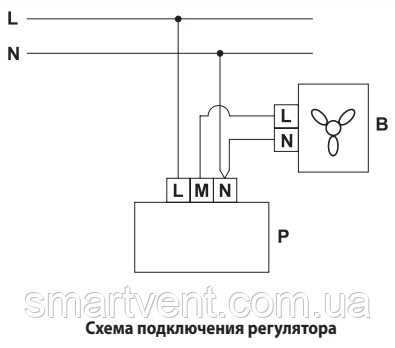 При снижении скорости вращения вентилятора уменьшается потребление энергии, то есть этот способ наиболее экономичен. Также при использовании такого метода, нет паразитного нагрева обмоток двигателя.
При снижении скорости вращения вентилятора уменьшается потребление энергии, то есть этот способ наиболее экономичен. Также при использовании такого метода, нет паразитного нагрева обмоток двигателя.
К сожалению, эти преимущества сводятся на нет высокой стоимостью устройства. Поэтому применение частотных контроллеров в быту нецелесообразно.
Популярные схемы, использующие снижение величины напряжения
Главное достоинство таких контроллеров – невысокая стоимость, что позволяет применять их в быту. Недостаток – слабая экономичность. При снижении оборотов уменьшается только шум, потребление электроэнергии фактически не меняется. Еще один недостаток – невозможность подключения мощных устройств, но для бытового использования это не критично.
Варианты схемных решений контроллеров:
- ступенчатые регуляторы, с применением автотрансформатора;
- автотрансформаторы с электронным управлением;
- симисторные или тиристорные контроллеры.
ВНИМАНИЕ! При использовании регулятора скорости, необходимо устанавливать вентилятор с мощностью несколько выше той, на которую рассчитано помещение. Это продлит срок его эксплуатации.
Это продлит срок его эксплуатации.
Ступенчатое управление с применением автотрансформатора
Принцип работы этого контроллера состоит в следующем. На вход автотрансформатора Т1 подается питающее напряжение 220 В. Обмотка имеет несколько ответвлений от части витков. При подключении нагрузки к ответвлениям, потребитель получает уменьшенное напряжение питания. С помощью переключателя SW1 мотор вентилятора M подключается к нужной части обмотки и скорость его вращения меняется. При понижении питающего напряжения снижается потребление электроэнергии. Сигнал на выходе – чистая синусоида, что благотворно влияет на состояние обмотки двигателя. Недостатком является большой размер блока управления. Ручка регулировки имеет ступенчатую шкалу, как правило, не более пяти положений. Плавно управлять скоростью вращения невозможно.
Автотрансформатор с электронным управлением
Электронный автотрансформатор работает по принципу широтно-импульсной модуляции. Транзисторная схема, модулируя импульсы – плавно изменяет выходное напряжение. Достоинства такого контроллера – компактные размеры и невысокая стоимость. Недостаток –длина кабеля от контроллера до мотора ограничена. Поэтому блок автотрансформатора, как правило, выполнен в отдельном корпусе от ручки управления и располагается в непосредственной близости к вентилятору.
Достоинства такого контроллера – компактные размеры и невысокая стоимость. Недостаток –длина кабеля от контроллера до мотора ограничена. Поэтому блок автотрансформатора, как правило, выполнен в отдельном корпусе от ручки управления и располагается в непосредственной близости к вентилятору.
Симисторный (тиристорный) контроллер
Не вдаваясь в подробности принципа фазного управления, по которому работают регуляторы этого типа, вкратце опишем схему. Каждый тиристор «срезает» полуволну переменного тока, уменьшая выходное напряжение. Величина регулируется при помощи блока управления. Достоинства– низкая цена, компактные размеры. Обороты можно регулировать практически от ноля. Недостаток – искрение обмотки двигателя, ограниченная мощность нагрузки.
ВАЖНО!
- Двигатель вентилятора должен иметь автоматическую термозащиту.
- Недопустимо применять в качестве регулятора скорости вентилятора диммеры для осветительных приборов.
Самостоятельное подключение регулятора скорости вентилятора
Все бытовые регуляторы рассчитаны на монтаж без обязательного приглашения электрика. Если вы в состоянии заменить выключатель или розетку – монтаж вам по силам.
Если вы в состоянии заменить выключатель или розетку – монтаж вам по силам.
Регуляторы скорости производятся в трех вариантах исполнения:
Настенный для установки без углубления.
Настенный для установки в углубление.
Устанавливаемый на DIN рейку
Установка настенного регулятора с углублением производится так же, как установка обычной розетки.
Схема подключения проста: контакты имеют маркировку, дополнительной проводки не требуется. Если на этом месте стоял обычный выключатель вентилятора – производится лишь замена его на регулятор.
В случае когда блок управления и регулятор выполнены в разных корпусах – требуется дополнительная проводка. Силовой кабель подключается к регулятору непосредственно от электрощита, а контроллер соединяется с ним слаботочным сигнальным проводом.
Видео:
RN-300 Наружный регулятор скорости оборотов Dospel
Наружный регулятор скорости оборотов Dospel RN-300
Електрический одннофазный регулятор скорости применяется для регулирования угловой скорости электродвигателей.
К електрической цепи регулятор подключается параллельно как стандартный выключатель.
Регулятор оснащен одной шкальной ручкой вращения, которая одновременно исполняет роль выключателя.
Конструкция внутреннего регулятора оборотов Dospel RP 300
Корпус регулятора изготовлен из ABS-пластика.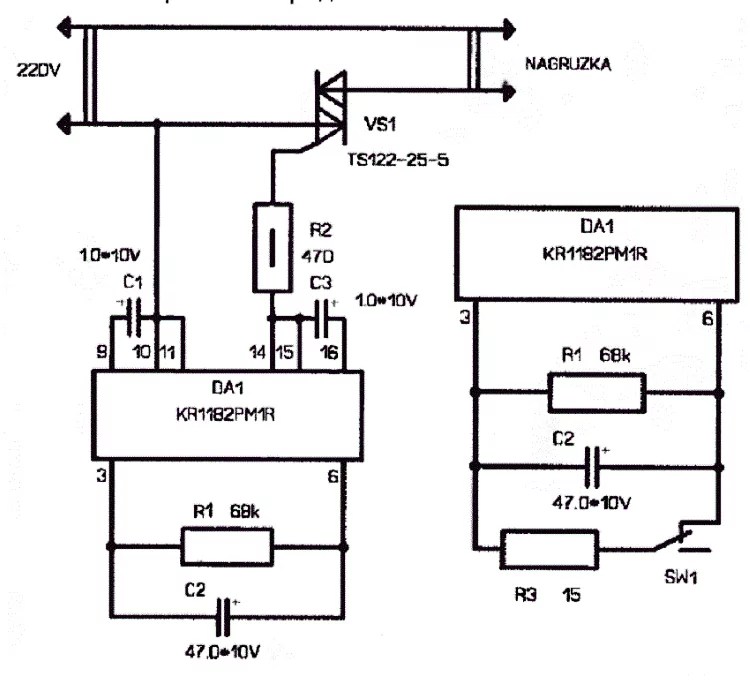
Конструктивно регулятор выпускается в двух модификациях: RP – внутренний (для монтажа внутри стены)
и RN наружный (для монтажа на поверхности стены).
Технические характеристики
|
МОДЕЛЬ |
RP 300 | RN 300 |
|---|---|---|
| Напряжение/частота[V/Hz] | 230/50 | 230/50 |
| Регулируемая подача напруги[V] | 60-230 | 60-230 |
| Мощность [W] | 50-300 | 50-300 |
| Режим работы | беспрерывный | беспрерывный |
| Предохранитель [A/V] | WTAF 3,15/250 | WTAF 3,15/250 |
| Размеры [mm] | 80x 80 x 55 | 80x 80 x 55 |
Руководство пользователя (1. pdf, 3,722 Kb) [Скачать]
pdf, 3,722 Kb) [Скачать]
Сертификат соответствия (2.pdf, 356 Kb) [Скачать]
Отзывы о RN-300 Наружный регулятор скорости оборотов Dospel
Сообщения не найдены
Вы пользовались продуктом?
Расскажите нам что-нибудь об этом и помогите другим принять правильное решение
Написать отзывУправление скоростью двигателя: 16 шагов
Однако, прежде чем мы сможем настроить схему контроллера двигателя, нам сначала нужно обсудить некоторые внешние компоненты.
Прежде всего, при работе с сильноточными приложениями настоятельно рекомендуется подключить сильноточный предохранитель последовательно к вашей цепи, рассчитанной на немного меньший, чем максимальный ток контроллера мотора. Дешевле заменить предохранитель стоимостью 15 250 А, чем контроллер двигателя за 400 долларов. Пока ток в цепи поддерживается ниже максимального номинала контроллера мотора, вам никогда не придется беспокоиться о перегреве управляющей электроники.
Предохранитель необходимо подключить последовательно между кабелем батареи и кабелем, который будет обеспечивать питание остальной цепи.
После установки открытые металлические части предохранителя необходимо изолировать термоусадкой для предотвращения возможных коротких замыканий. Рекомендуется использовать либо прозрачную термоусадочную трубку, либо оставить зазор, позволяющий видеть смотровое окошко предохранителей. Возможность быстро и визуально определить перегоревший предохранитель избавит вас от многих головных болей и догадок.
После предохранителя следующий компонент, который должен быть подключен последовательно, называется главным контактором (иногда также ошибочно называют «соленоидом»). При работе с такими большими двигателями предполагается, что питание контроллера двигателя будет включаться и выключаться с помощью сильноточного главного контактора.
Этот компонент, по сути, просто очень большое реле. Когда электромагнит в главном контакторе находится под напряжением, соленоид внутри него включает переключатель, который позволяет току постоянного тока протекать к двигателю.Когда катушка не находится под напряжением, переключатель перевернут, и электричество не может течь.
Для поддержания главного контактора в рабочем состоянии необходимы два дополнительных компонента. Первый – это диод 1N5408, который служит демпфирующим диодом на катушке для защиты от всплесков обратного напряжения и предохраняет компоненты, расположенные дальше по линии, от перегорания.
Это, конечно, предполагает, что вы используете главный контактор на 200 А. Если вы используете контактор большего размера, вам следует проверить спецификацию соответствующего диода.
Если вы используете контактор большего размера, вам следует проверить спецификацию соответствующего диода.
Второй необходимый компонент – это сильноточный резистор предварительной зарядки 250 Ом 10 Вт, подключенный через сильноточные контакты. Этот резистор позволяет напряжению обходить контактор и заряжать очень большие конденсаторы в контроллере двигателя. Причина, по которой вы хотите это сделать, заключается в том, что если задействовать соленоид без предварительной зарядки конденсаторов, произойдет скачок тока, поскольку конденсаторы будут пытаться потреблять как можно больше тока. Такой большой ток на клеммах контактора потенциально может привести к точечной сварке их в положении «включено».Проще говоря, ваш главный контактор не сможет выключиться, и питание вашего двигателя будет зависнуть.
Опять же, если вы используете контактор большего размера, чем тот, который показан на рисунке, проверьте таблицу на наличие резистора предварительного заряда подходящего размера.
Подключите резистор предварительной зарядки между клеммами высокого тока на главном контакторе и демпфирующий диод между клеммами катушки низкого тока.
Методы регулирования скорости для различных типов двигателей с регулировкой скорости
Казуя ШИРАХАТА
Ориентал Мотор Ко., Ltd. предлагает широкий выбор двигателей с регулировкой скорости. Наши комплекты двигателей с регулировкой скорости включают двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость. Существует три группы продукции для двигателей с регулировкой скорости. «Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который объединяет трехфазный асинхронный двигатель с небольшой инвертор.В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от домашнего оборудования до станков на промышленных предприятиях. Электродвигатель сегодня является необходимым и незаменимым источником энергии во многих отраслях промышленности. Эти двигатели имеют самые разные функции и характеристики.Если сосредоточить внимание на сегменте регулирования скорости на рынке двигателей, серводвигатели и шаговые двигатели управляют своей скоростью с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и / или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Электродвигатель и редукторные электродвигатели переменного тока
- Бесщеточные двигатели постоянного тока и мотор-редукторы
- Инверторный блок
2.
 Методы регулирования скорости различных двигателей с регулировкой скорости
Методы регулирования скорости различных двигателей с регулировкой скоростиМетод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис. 1.
Рис.1 Классификация двигателей с регулировкой скорости
2.1. Двигатели с регулировкой скорости переменного тока
2.1.1. Строительство Motor
Как показано на рис. 2, конструкция однофазного и трехфазного асинхронных двигателей включает статор, на котором намотана первичная обмотка, и цельный алюминиевый ротор в форме корзины, отлитый под давлением.Ротор недорогой, потому что конструкция проста и не использует магнит.Рис. 2 Конструкция асинхронного двигателя
Когда необходимо контролировать скорость этого двигателя, для определения скорости используется тахогенератор, который присоединяется к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя. и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот.Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя. и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот.Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис.3 Система электродвигателя с регулировкой скорости переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть выражена выражением (1). Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, изменяется скольжение и , затем изменяется частота вращения N.
N = 120 · f · (1- s ) / P · · · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, показанного на рис.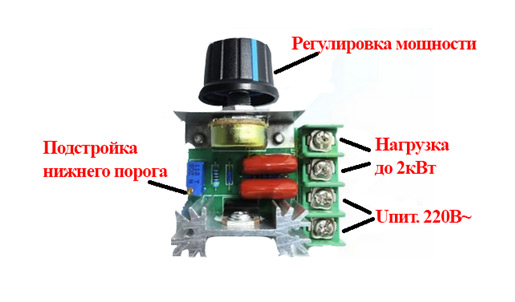 4, на кривой «Скорость вращения – крутящий момент» существует стабильный диапазон и нестабильный диапазон. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается регулированием скорости в узком диапазоне, например N1 ~ N3 на рис.5. Чтобы обеспечить надежную работу даже в вышеупомянутом нестабильном диапазоне, необходимо определять скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который снижает ошибку скорости по сравнению с установить значение.
4, на кривой «Скорость вращения – крутящий момент» существует стабильный диапазон и нестабильный диапазон. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается регулированием скорости в узком диапазоне, например N1 ~ N3 на рис.5. Чтобы обеспечить надежную работу даже в вышеупомянутом нестабильном диапазоне, необходимо определять скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который снижает ошибку скорости по сравнению с установить значение.
Рис. 4 Частота вращения – крутящий момент асинхронных двигателей
Рис.5 Простое управление напряжением
Доступные методы управления напряжением включают управление трансформатором или управление фазой.На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения / выключения каждого полупериода переменного напряжения (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на Рис. 7 и Рис. 8. Регулирование скорости достигается методом фазового регулирования путем управления среднеквадратичным значением значение переменного напряжения.
Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, устанавливая время включения / выключения каждого полупериода переменного напряжения (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на Рис. 7 и Рис. 8. Регулирование скорости достигается методом фазового регулирования путем управления среднеквадратичным значением значение переменного напряжения.
Рис.6 Изменение напряжения трансформатором
Рис.7 Изменение напряжения с помощью фазового управления
Рис.8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью за счет регулирования фазы с обратной связью даже в нестабильном диапазоне.
На рис. 9 показана конфигурация системы управления скоростью для электродвигателя переменного тока в виде блок-схемы.
Рис. 9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока
Рис.10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Установленное значение d скорости и обнаруженное напряжение e скорости, генерируемое тахогенератором, сравниваются в блоке усилителя сравнения. Затем определяется уровень сигнала напряжения , .
Сигнал напряжения a является низким, когда обнаруженное значение скорости до заданного значения скорости увеличивается, и выше, когда заданное значение скорости уменьшается.Поскольку триггерный сигнал выводится в точке, где треугольная волна b, пересекается с сигналом напряжения a, , определяется синхронизация (фазовый угол), когда симистор включен, с уровнем сигнала напряжения a . Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается. Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид упомянутого выше регулятора скорости. На рис. 11 рабочая точка двигателя образует контур Q-R-S-T-Q с центром на O, и скорость вращения поддерживается между N1 и N2. Этот цикл максимально сокращен за счет повышения точности определения скорости.
Рис.11 Работа регулятора скорости
Двигатель с регулировкой скорости переменного тока имеет следующие особенности при использовании этого регулирования фазы с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схема управления скоростью может быть настроена просто потому, что схема сглаживания не нужна, что позволяет получить компактную конструкцию по низкой цене.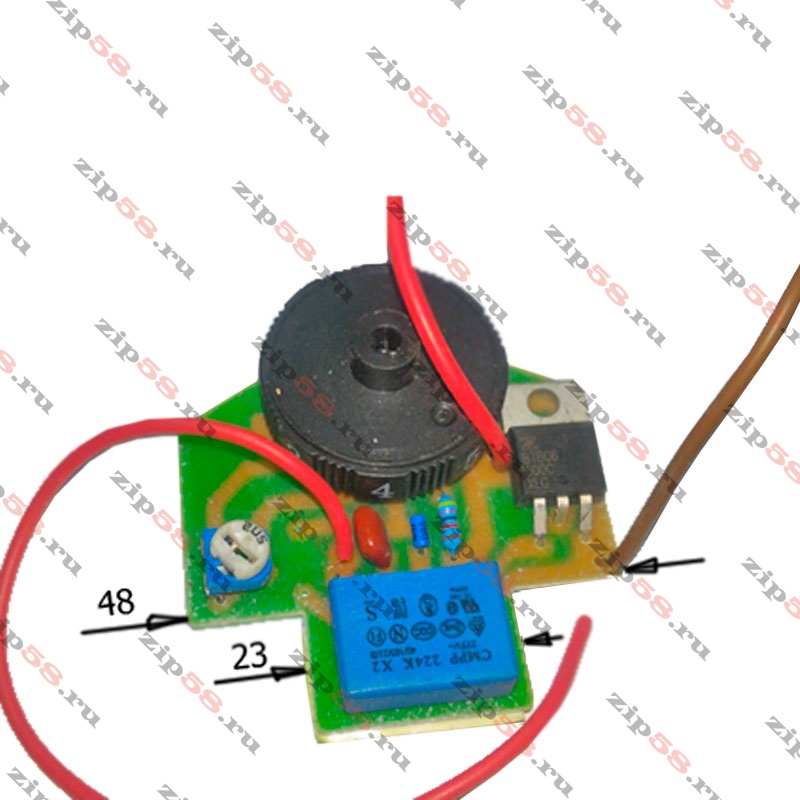
2) Таким же образом возможна конструкция с длительным сроком службы, поскольку нет необходимости в большом алюминиевом электролитическом конденсаторе.
3) Переключение срабатывает только один раз в течение каждого полупериода промышленного источника переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Двигатели с регулировкой скорости вращения электродвигателя переменного тока обычно имеют характеристики «Скорость вращения – крутящий момент», показанные на рис.12.
Рис. 12 Характеристики крутящего момента и скорости вращения
«Строка безопасной эксплуатации» приведена на рис. 12. «Строка безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2. 2.1. Конструкция двигателя
2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, катушка соединена звездой (Y-разводкой) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагниченный в многополюсной конфигурации, как показано на рис.14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов при каждом повороте ротора.
Рис.14 Конструкция бесщеточного двигателя постоянного тока
2.2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики вращательной скорости-момента бесщеточного двигателя постоянного тока показывают отрицательную наклонную характеристику, когда его скорость не контролируется, что аналогично характеристикам щеточного двигателя постоянного тока.
Рис. 15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
Когда нагрузка не приложена и входное напряжение установлено на V2 на рисунке 15, рабочая точка двигателя становится P, а скорость вращения равна N1. Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается на Q, а скорость вращения снижается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается на Q, а скорость вращения снижается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Этот контроль напряжения реализуется инвертором в выходной части схемы управления (драйвер). Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как в последовательности, показанной на рисунке 16 (b), с использованием шести переключающих элементов (FET или IGBT), показанных на рисунке 16 (a).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис.16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис. 16 (a), а состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка станет полюсом N или полюсом S.
16 (a), а состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка станет полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется ИС Холла, и соответствующий переключающий элемент включается или выключается, как показано на Рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из U-фазы в W-фазу. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, а ротор поворачивается на 30 градусов, переходя к шагу 2.Один оборот ротора выполняется повторением этой операции 12 раз (шаги 1 ~ 12).
На рис. 17 показана блок-схема конфигурации для управления скоростью бесщеточного двигателя постоянного тока.
Рис.17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от ИС Холла в части определения положения блок-схемы, и двигатель вращается.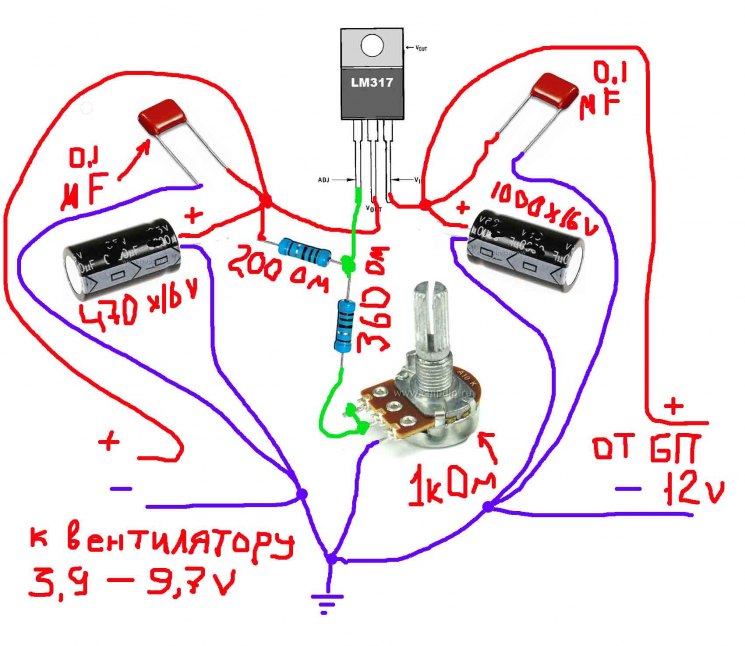
Затем сигнал от ИС Холла отправляется на датчик скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом установки скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения.Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения.
Бесщеточные двигатели постоянного тока имеют следующие особенности.
1) Он имеет высокий КПД, потому что используется ротор с постоянными магнитами и вторичные потери небольшие.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость реакции.
3) Можно уменьшить размер двигателя, потому что он очень эффективен.
4) Колебания скорости при изменении нагрузки незначительны.
Фиг.16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод возбуждения синусоидальной волны путем получения информации о положении ротора с высоким разрешением из программного обеспечения из сигнала IC Холла. Результатом этого метода является метод управления с низким уровнем шума, поскольку ток, протекающий к двигателю, не изменяется быстро. (2)
Результатом этого метода является метод управления с низким уровнем шума, поскольку ток, протекающий к двигателю, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, приложенных методом синусоидального возбуждения и методом 120-градусного возбуждения
2.2.3. Характеристики
Характеристики скорости вращения и крутящего момента бесщеточного двигателя постоянного тока имеют ограниченную область нагрузки в дополнение к области непрерывной работы.
Ограниченная рабочая зона очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме работы продолжается в течение пяти секунд или более, активируется функция защиты водителя от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Инверторный блок управляет скоростью трехфазного асинхронного двигателя, изменяя частоту f напряжения, подаваемого на двигатель.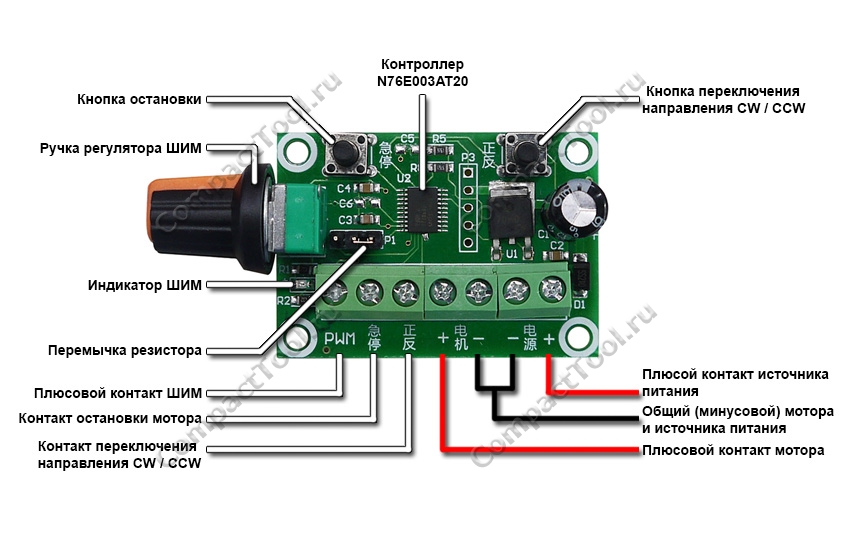 Инверторный блок изменяет частоту f, изменяя цикл включения / выключения шести переключающих элементов, и скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
Инверторный блок изменяет частоту f, изменяя цикл включения / выключения шести переключающих элементов, и скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120 · f · (1- s ) / P ·· · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл включения / выключения, как показано на рис.21. Время включения / выключения регулируется так, что среднее напряжение, приложенное к двигателю, приобретает форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой сигнала синусоидальной формы. Этот метод называется ШИМ-управлением.
Рис. 19 Дежурный контроль ВКЛ / ВЫКЛ
19 Дежурный контроль ВКЛ / ВЫКЛ
Метод управления скоростью наших инверторных блоков подразделяется на два типа: управление с обратной связью, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация управления без обратной связи в виде блок-схемы.
Рис.20 Блок-схема управления разомкнутым контуром
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и позволяет получить высокие скорости (частоту можно установить до 80 Гц) просто тогда, когда регулирование скорости с изменяющейся нагрузкой не представляет особой важности.
Создаваемый крутящий момент T двигателя показан формулой (2).Из этого соотношения можно сказать, что крутящий момент также будет постоянным, если сделать постоянным V / f, отношение напряжения V к частоте f.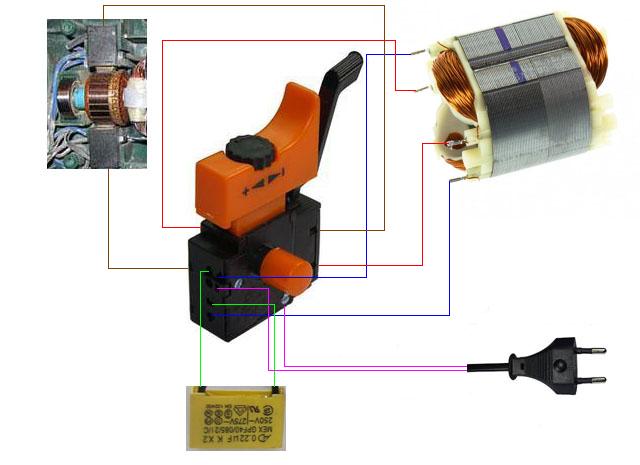
T = K ・ I ・ V / f ・ ・ ・ (2)
T : Крутящий момент [Н · м]
V : Напряжение источника питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Постоянная
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости к высокой скорости, необходимо отрегулировать отношение V / f на низкой скорости в соответствии с характеристиками двигателя, как показано на рис. 23 сплошной линией.
Рис.21 V / f Control
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис.22 Блок-схема управления по замкнутому контуру
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, используя таблицу характеристик данных (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости в датчике скорости на двигателе.
Рис.23 Таблица характеристик и данных
Используя эту таблицу характеристик и время t обнаруженной разности фаз, инвертор вычисляет выходную частоту инвертора, которая соответствует команде Nset скорости вращения, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM. В результате при приложении нагрузки выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
В результате при приложении нагрузки выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
2.3.2. Характеристика с
Характеристики скорости вращения-момента инверторного блока показаны на рис. 26 и 27. Как объяснено в разделе «Двигатель, регулирующий скорость переменного тока», на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет предел для непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис.24 Характеристики скорости вращения и момента для управления без обратной связи
Рис.25 Характеристики скорости вращения и момента для замкнутого контура управления
3. Резюме
Oriental Motor предлагает три группы продуктов (двигатели с регулировкой скорости переменного тока, бесщеточные двигатели с регулировкой скорости постоянного тока и инверторные блоки) для использования в широком диапазоне приложений регулирования скорости. Подходящий продукт для регулирования скорости может быть выбран в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Подходящий продукт для регулирования скорости может быть выбран в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, наилучшим образом отвечающую различным потребностям наших клиентов.
Список литературы
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Публикация Когио Чосакай (1998)
(2) Казуо Абе: «Технология бесшумного привода бесщеточного двигателя», RENGA № 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёши Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No.159, стр. 23-28 (1999)
| Кадзуя Сирахата Завод Цуруока, Операции ACIX Подразделение схемотехники Секция разработки схем |
Что делает контроллер скорости двигателя? – 4QD
По сути, контроллер скорости двигателя просто регулирует скорость и направление электродвигателя, изменяя приложенное к нему напряжение, но на самом деле он должен делать гораздо больше;
У нас есть короткое видео, в котором объясняются основы….
Но они могут выполнять некоторые или все следующие действия….
- Обеспечивает управляемый пуск [или плавный пуск]. Заблокированный двигатель может потреблять ток, в 20 раз превышающий нормальный рабочий ток. Если вы внезапно подключите аккумулятор к двигателю, может возникнуть очень высокий начальный скачок тока. Мы видели, как корпуса двигателей разрываются на части, а зубья шестерен срываются из-за высокого крутящего момента, создаваемого неконтролируемым включением.
- Реверсивный; чтобы сделать это безопасно, контроллер сначала должен остановить двигатель – реверсирование с полной скорости может стать захватывающим, если не будет сделано должным образом!
- Защита от обратной полярности, на случай, если кто-то подключит положительный к отрицательному.
- Защита от сбоев цепи, контроллер должен обеспечивать безопасную реакцию в случае обрыва проводов управления и т. Д.
- Обеспечивает все другие функции, которые требуются для различных приложений, такие как плавное ускорение и замедление, установка максимальной скорости, ограничение тока, пропорциональное управление и т. Д.
 Д.
Д.Как работает регулятор скорости двигателя?
Все контроллеры 4QD работают путем включения и выключения подключения аккумулятора к двигателю примерно 20 000 раз в секунду с использованием метода, называемого широтно-импульсной модуляцией [PWM].Напряжение на двигателе выглядит следующим образом… ..
Двигатель усредняет эти импульсы, так как эта скорость переключения слишком высока для обнаружения двигателем. Если батарея подключена только на половину общего времени [B], то мотор видит батарею 24 В, как если бы она была только 12 В, и работает с половинной скоростью. Кроме того, поскольку переключение происходит очень быстро, индуктивность двигателя, которая действует как электрический маховик, поддерживает постоянный ток в двигателе. Но этот ток идет от батареи только половину времени, поэтому ток батареи будет вдвое меньше тока двигателя.
Но этот ток идет от батареи только половину времени, поэтому ток батареи будет вдвое меньше тока двигателя.
Мощность – это напряжение, умноженное на ток, поэтому контроллер двигателя фактически работает как трансформатор: в приведенном выше примере напряжение двигателя, умноженное на ток двигателя, будет равно напряжению аккумулятора, умноженному на ток аккумулятора, поэтому практически вся мощность от аккумулятора подается на мотор. Потери в контроллере небольшие, так как мощность – это тепло, а контроллер действительно не может рассеивать много тепла.
Если вы хотите узнать больше о том, как контроллер делает это, здесь есть более подробное описание ШИМ.
Теперь, когда вы знаете, что они делают, приходите и посмотрите на наш ассортимент контроллеров скорости двигателя и на те проекты, в которые они были встроены.
У нас также есть страница, которая объясняет больше о различных типах электродвигателей, таких как постоянный магнит, последовательная обмотка, шунтирующая обмотка и т. Д.
Д.
Следующая страница
Если вы нашли эту статью полезной, поделитесь ею, чтобы помочь другим узнать о ней
Электронные регуляторы скорости – легенды робототехники
Какие они?
«Электронный регулятор скорости» или ESC – это любое устройство, предназначенное для приема управляющих сигналов (обычно от радиоприемника вашего бота) и использования их для перемещения электродвигателей.Ниже приведена простая диаграмма, показывающая, как эти компоненты вписываются в дизайн вашего бота:
В этом разделе мы рассмотрим наиболее распространенные категории доступных контроллеров скорости и то, как их можно использовать в создании вашего бота.
Типы регуляторов скорости
Существует много различных типов регуляторов скорости и еще больше мнений о том, какой из них лучше всего использовать. Чтобы начать собственное путешествие по ESC, сначала определите тип и количество двигателей, которые ваш бот будет использовать в своем дизайне.
Вам нужны только регуляторы скорости, предназначенные для двигателей, которые вы будете использовать. (информацию о типах и выборе двигателей см. В разделе «Электродвигатели»)
- Матовые ESC электродвигателя: Если вы используете щеточные электродвигатели постоянного тока, вам понадобится по крайней мере один ESC, разработанный специально для управления щеточными электродвигателями постоянного тока. Это чаще всего используется для системы привода вашего бота.
- ESC для бесщеточных двигателей: Если вы используете бесщеточные двигатели постоянного тока, вам понадобится по крайней мере один ESC, разработанный специально для управления бесщеточными двигателями постоянного тока.Это чаще всего используется для системы вооружения вашего бота, но также может использоваться для системы привода.
Как прикрепить ESC к ресиверу и моторам
Регуляторы двигателя с щеткой
Обычно щеточный ESC управляет одним или двумя щеточными двигателями. (Помните, что щеточные двигатели имеют 2 провода для подключения питания.)
(Помните, что щеточные двигатели имеют 2 провода для подключения питания.)
Ниже приведен пример ESC с щеточным двигателем. Этот саблезубый двойной 12A 6V-24V R / C регенеративный драйвер двигателя предназначен для управления 2 двигателями одновременно.(Вот почему он называется двойным двигателем.)
Sabertooth Dual 12A 6V-24V R / C Regenerative Motor DriverЭтот ESC будет подключен в 6 разных местах.
Схема подключения, показывающая соединения ESC с двигателями, радиоуправляемым приемником и аккумулятором.- 1 подключение к АКБ . (Обеспечивает питание схем ESC, двигателей и RC-приемника.)
- 2 соединения с двигателями . (В этом случае ESC является двойным контроллером, поэтому провода питания (положительный и отрицательный) проходят от ESC к каждому мотору.)
- 3 подключения к RC-приемнику . (Этот тип ESC использует 3 «канала» от вашего приемника для управления скоростью и направлением ваших 2 двигателей. )
- Один управляет командами влево / вправо.
- Один управляет командами вперед / назад.
- Один не является обязательным и позволяет отправить сигнал о том, что бот «перевернулся». Если это произойдет, «флип-канал» изменит ваши команды, так что вы сможете двигаться вверх ногами, не меняя способ управления RC-передатчиком. (Короче говоря, движение ручки управления вперед по-прежнему будет означать движение к боту на арене. Слева – влево, вправо – вправо и т. Д.)
 )
)ESC с бесщеточным двигателем
Обычно бесщеточный ESC управляет одним бесщеточным двигателем. (Помните, что у бесщеточных двигателей есть 3 провода для подключения питания.)
Ниже приведен пример ESC бесщеточного двигателя. Эта конкретная модель поставлялась на Amazon в комплекте с бесщеточным двигателем; стоимостью 14 долларов.
Hobbypower A2212 Бесщеточный двигатель 1000 квт + регулятор скорости 30a для мультикоптера 450 X525 Quadcopter Этот регулятор скорости вращения подключается в трех разных местах для управления одним двигателем.
- 1 подключение к АКБ . (Обеспечивает питание схем ESC, двигателей и RC-приемника. Это толстые красные и черные провода на картинке выше.)
- 1 подключение к двигателю . (Это 3 синих провода на картинке выше. Помните, что для бесщеточного двигателя требуется 3 провода от ESC к двигателю.Для щеточного двигателя требуется только 2.)
- 1 подключение к RC-приемнику : Он контролирует скорость вашего двигателя, а также функцию «вкл / выкл».
- Например, если вы использовали бесщеточный двигатель и этот ESC для управления оружием, вы бы подключили его к его собственному каналу на RC-приемнике.
- В идеале вы должны использовать канал, обычно используемый для «газа» в настройках управления RC. Таким образом, вы можете включать и выключать мотор в середине боя, не нажимая постоянно кнопку или джойстик.«Поставь и забудь». (см. Изображение ниже)
 Это тоже дроссельная заслонка. Если в примере, описанном выше, ваше оружие будет подключено к двигателю оружия, оно будет вращаться на полной мощности прямо сейчас, потому что джойстик полностью поднят.
Контроллеры скорости
Это тоже дроссельная заслонка. Если в примере, описанном выше, ваше оружие будет подключено к двигателю оружия, оно будет вращаться на полной мощности прямо сейчас, потому что джойстик полностью поднят.
Контроллеры скоростидля двигателей постоянного тока и BL
Контроллеры скорости FAULHABERспециально разработаны для получения максимальной отдачи от двигателей FAULHABER DC и BL.Они компактны, просты в эксплуатации и обеспечивают точное и эффективное управление скоростью. Индивидуальное управление скоростью можно легко настроить с помощью компьютера и бесплатного программного обеспечения FAULHABER Motion Manager.
Speed Control от FAULHABER – это высокодинамичные контроллеры скорости для управления:
В зависимости от размера и состояния поставки на контроллере скорости могут использоваться различные комбинации двигателей и датчиков. Различные размеры, а также гибкие возможности подключения открывают широкий спектр применений в таких областях, как лабораторная техника и производство оборудования, технологии автоматизации, манипуляционные и инструментальные устройства, станки или насосы.
от FAULHABER могут быть адаптированы к данному приложению с помощью программного обеспечения FAULHABER Motion Manager. С помощью контроллеров скорости можно настроить рабочий режим, параметры контроллера, а также тип и масштаб спецификации заданного значения. Для настройки контроллеров скорости используется USB-адаптер для программирования.
Режимы работы двигателей в сочетании с регуляторами скорости
Скорость двигателя регулируется с помощью ПИ-регулятора с переменными параметрами.В зависимости от версии скорость в регуляторе скорости определяется через подключенную сенсорную систему или без сенсора на основе тока двигателя. Задание уставки может быть выполнено с использованием аналогового значения или сигнала ШИМ. Направление вращения меняется на противоположное посредством отдельного переключающего входа. Кроме того, можно считывать сигнал скорости регулятора скорости через частотный выход. Двигатели могут также работать в качестве регулятора напряжения или в режиме фиксированной скорости.
FAULHABER Регуляторы скорости определяют температуру обмотки двигателя по его нагрузочной характеристике. Динамически в результате доступен пиковый ток, который обычно в 2 раза превышает постоянный ток. При постоянно более высокой нагрузке ток ограничивается установленным постоянным током. В случае частого реверсирования с большими присоединенными массами рекомендуется использовать контроллер движения.
Цепи электронного управления скоростью (ESC), работа и приложения
Термин ESC означает «электронное управление скоростью – это электронная схема, используемая для изменения скорости электродвигателя, его маршрута, а также для работы в качестве динамического тормоза. Они часто используются в радиоуправляемых моделях с электрическим приводом, причем изменение наиболее часто используется для бесщеточных двигателей, обеспечивающих 3-фазный источник электроэнергии , производимый электроникой, низковольтный источник энергии для двигателя. ESC может быть отдельным блоком, который встроен в канал управления приемником дроссельной заслонки или объединен с самим приемником, как это происходит в большинстве игрушечных автомобилей с дистанционным управлением. Некоторые производители радиоуправляемых устройств, которые подключают эксклюзивную электронику для любителей к своим автомобилям, контейнерам или самолетам начального уровня, используют электронику, которая объединяет их на одной печатной плате.
ESC может быть отдельным блоком, который встроен в канал управления приемником дроссельной заслонки или объединен с самим приемником, как это происходит в большинстве игрушечных автомобилей с дистанционным управлением. Некоторые производители радиоуправляемых устройств, которые подключают эксклюзивную электронику для любителей к своим автомобилям, контейнерам или самолетам начального уровня, используют электронику, которая объединяет их на одной печатной плате.
Характеристики электронного регулятора скорости
Как мы знаем, ESC управляет скоростью вращения двигателей самолета.Он служит той же цели, что и сервопривод газа в самолете с тлеющим двигателем. Это грань между радиоприемником самолета и силовой установкой. Электронный регулятор скорости будет иметь 3 комплекта проводов. Один провод будет вставлен в основную батарею самолета. Второй провод будет иметь типичный провод сервопривода, который подключается к каналу дроссельной заслонки приемника. И, наконец, треть провода используется для питания мотора. К основным функциям электронного управления скоростью относятся схема нейтрализации аккумуляторной батареи, отсечка низкого напряжения, тормоз и т. Д.
И, наконец, треть провода используется для питания мотора. К основным функциям электронного управления скоростью относятся схема нейтрализации аккумуляторной батареи, отсечка низкого напряжения, тормоз и т. Д.
Компоненты, используемые в ESC
Компоненты, используемые в ESC, в основном включают следующие
- Паяные площадки для фаз двигателя с 3 BLDC
- Отрицательные (-) соединения LIPO
- Положительные (+) соединения LIPO
- Сервосигнал или вход сигнала ШИМ
- Заземление сигнала ШИМ
- Паяльная перемычка для изменения направления вращения (CW / CCW)
- Паяльная перемычка для изменения типа входного сигнала ШИМ
Светодиод состояния
Типы электронных регуляторов скорости
Существует два типа электронных регуляторов скорости, основанных на конкретных требованиях, вы можете приобрести тот, который есть в магазинах моделей RC, например, щеточный ESC и бесщеточный электронный регулятор скорости.
Матричный регулятор скорости
Матричный регулятор скорости – первый электронный регулятор скорости, который существует уже несколько лет. Его очень дешево использовать в различных электромобилях RTR.
Бесщеточный ESC
Бесщеточный ESC – это современный технологический прорыв в области электронных регуляторов скорости. Это также немного дороже. Подключенный к бесщеточному двигателю, он обеспечивает большую мощность и более высокую производительность по сравнению с щеточными двигателями.Это также может длиться дольше.
Схема электронного регулятора скорости
Термин ESC часто используется как сокращение для «электронного регулятора скорости». Основная функция ESC – изменять количество энергии, подаваемой на электродвигатель от аккумуляторной батареи самолета, в зависимости от положения ручки газа. Раньше регуляторы скорости в основном использовались в лодках и автомобилях с дистанционным управлением, в которых использовался переменный резистор со стеклоочистителем, который приводился в действие серводвигателем.
Этот метод работает разумно при полном открытии дроссельной заслонки, так как батарея подключена прямо к двигателю, хотя в ситуациях частичного дросселирования ток через резистор вызывает потерю энергии в виде тепла.В качестве модели самолет будет использовать большую часть своего времени на дроссельной заслонке. Это не очень практичный способ регулирования мощности.
Текущие регуляторы скорости различают мощность двигателя за счет быстрого включения и выключения питания. Здесь MOSFET-транзистор используется в качестве переключателя вместо механического устройства, и величина, с которой он переключается, составляет около 2000 раз в секунду. Таким образом, мощность двигателя варьируется путем изменения времени включения по сравнению с временем отключения в заданном цикле. Вот простая схема ESC с диаграммой формы сигнала, которая может помочь в описании.
Когда полевой МОП-транзистор включен, ток возрастает по мере увеличения магнитного поля в обмотках двигателя. Когда полевой МОП-транзистор выключен, магнитная энергия, накопленная в обмотках, должна поглощаться ESC. Подключив диод к двигателю, мы возвращаем энергию в двигатель в виде тока, который повышается при выходе из строя магнитного поля.
Когда полевой МОП-транзистор выключен, магнитная энергия, накопленная в обмотках, должна поглощаться ESC. Подключив диод к двигателю, мы возвращаем энергию в двигатель в виде тока, который повышается при выходе из строя магнитного поля.
Выбор правильного ESC
Важное соображение номер один, которое следует иметь в виду, – согласовать электронный регулятор скорости с типом двигателя, который вы использовали.Обязательно приобретите правильный ESC для конкретного двигателя: щеточный ESC используется для щеточного двигателя, бесщеточный ESC используется для бесщеточного двигателя , и никогда наоборот. Обычно, помимо этикеток, вы сразу узнаете, что это щеточный двигатель, если у него 2-проводное соединение. Если у мотора три провода, то он бесщеточный.
Для людей, которые не знакомы с электронным контролем скорости, большинство моделей, таких как модель RTR RC, снабжены предварительно установленным электронным регулятором скорости . Большинство из них представляют собой чистые цифровые устройства, которые хорошо выполняют свою работу. Если радиоуправляемый автомобиль оснащен аналоговым регулятором скорости, которому нужен сервопривод для работы поворотного рычага, подумайте о том, чтобы получить цифровой регулятор, как только сможете.
Большинство из них представляют собой чистые цифровые устройства, которые хорошо выполняют свою работу. Если радиоуправляемый автомобиль оснащен аналоговым регулятором скорости, которому нужен сервопривод для работы поворотного рычага, подумайте о том, чтобы получить цифровой регулятор, как только сможете.
Также нормально получить ESC с противоположной функциональностью. Таким образом, вы устраните все помехи и предупреждения, возникающие при выходе из зоны водительского стенда, чтобы возвращать радиоуправляемый автомобиль каждый раз, когда он застревает на трассе.
Приложения ESC
Электронные системы контроля скорости используются в системах дистанционного управления и транспортных средствах .
- Электромобили
- Электровелосипеды
- Электровелосипеды
- Автомобили
- Вертолеты
- Самолеты
- Лодки
- Квадрокоптеры
- Прошивка ESC
Итак, речь идет об электронном регуляторе скорости. Мы надеемся, что вы лучше понимаете эту концепцию. Кроме того, любые сомнения относительно этой концепции или реализации каких-либо электрических проектов, пожалуйста, дайте свои ценные предложения, комментируя в разделе комментариев ниже.Вот вам вопрос, Какова функция ESC ?
Мы надеемся, что вы лучше понимаете эту концепцию. Кроме того, любые сомнения относительно этой концепции или реализации каких-либо электрических проектов, пожалуйста, дайте свои ценные предложения, комментируя в разделе комментариев ниже.Вот вам вопрос, Какова функция ESC ?
Фото:
509 Превышен предел пропускной способности
509 Превышен предел пропускной способности Сервер временно не может обслуживать ваш запрос из-за того, что владелец сайта достиг своего ограничение пропускной способности.