выполнение преобразователя своими руками, как правильно выбрать схему на 12В
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.
- Использование частотных преобразователей
- Применение электронных регуляторов
- Принцип работы устройства
- Изготовление самодельных реле
- Схема на ШИМ-транзисторе
- Внедрение автоматических систем управления
Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты, в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов.
- Ступенчатый разгон и возможность понижения оборотов двигателя при уменьшении нагрузки позволяет уменьшить потребление электроэнергии. Использование частотных преобразователей с мощными асинхронными двигателями позволяет вдвое сократить расходы на электроэнергию.
- Защита электронных механизмов. Преобразователи частоты позволяют контролировать показатели давления, температуры и ряд других параметров. При использовании двигателя в качестве привода насоса в емкости, в которую закачивается жидкость или воздух, может быть установлен датчик давления, отвечающий за управление механизмом и предотвращающий его выход из строя.
- Обеспечение плавного запуска. При запуске электродвигателя, когда мотор сразу начинает работать на максимальных оборотах, на привод приходится повышенная нагрузка. Использование регулятора оборотов обеспечивает плавность запуска, что гарантирует максимально возможную долговечность работы привода и отсутствие его серьезных поломок.

- Сокращаются расходы на техническое обслуживание насосов и самих силовых агрегатов. Наличие регуляторов оборотов снижает риск поломок отдельных механизмов и всего привода.

Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:
- Электрический двигатель.
- Блок преобразователя и микроконтроллерная схема управления.
- Механизмы и приводы.

Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
- Питание от сети направляется на конденсатор.
- Используемый конденсатор полностью заряжается.
- Нагрузка передается на резистор и нижний кабель.
- Электрод тиристора, соединенный с положительным контактом на конденсаторе, получает нагрузку.
- Передаётся заряд напряжения.
- Происходит открытие второго полупроводника.
- Тиристор пропускает полученную с конденсатора нагрузку.
- Конденсатор полностью разряжается, после чего повторяется полупериод.
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
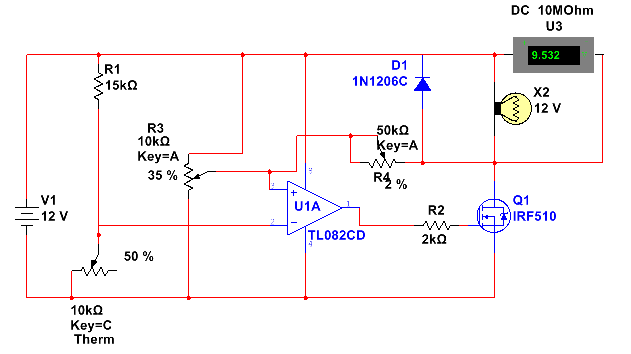
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
В продаже можно найти различные типы микроконтроллеров, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
Советы по изготовлению регулятора частоты вращения электродвигателя
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
- Устройство системы
- Схема регулятора оборотов коллекторного двигателя
- Зачем используют такой прибор-регулятор
- Регулятор оборотов электродвигателя 220в
- Как сделать регулятор своими руками
- Внедрение системы управления
- Регулировка работы
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.

Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора.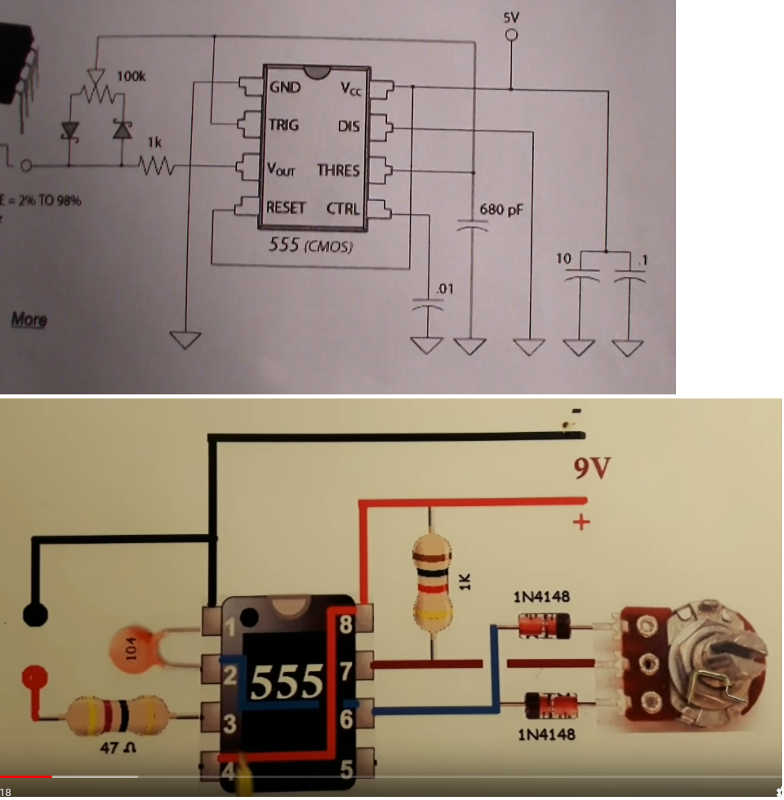 По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов).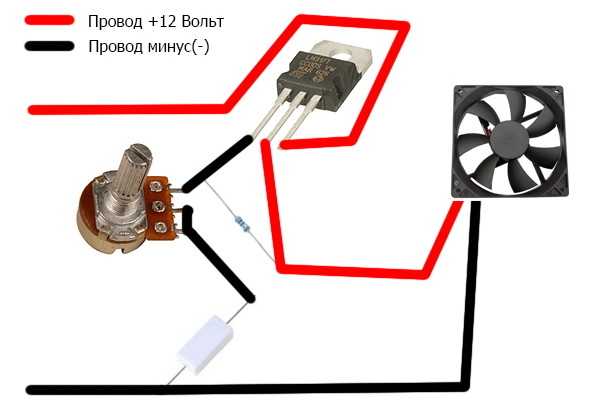 В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств.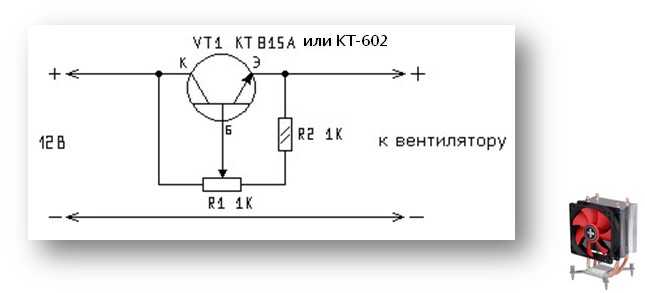 Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа.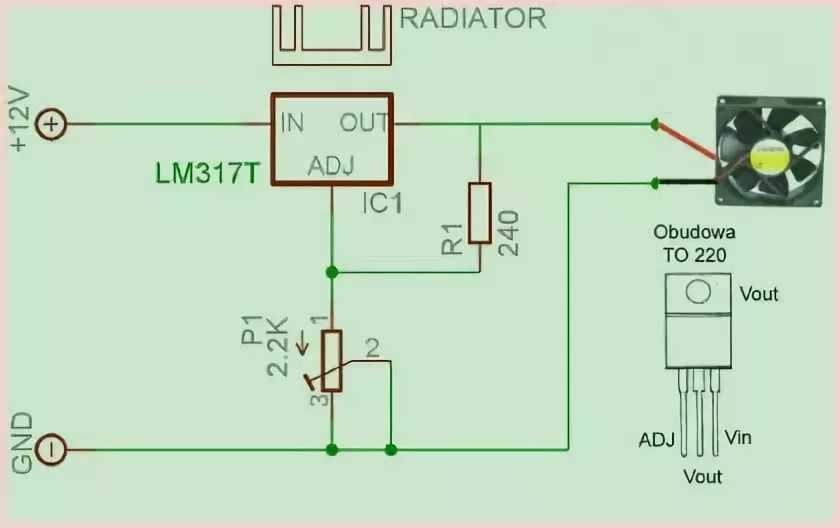 Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Учебное пособие по регулятору скорости двигателя. Инженерное мышление
Изучите основы регулятора скорости электродвигателя. В этой статье мы узнаем, как спроектировать простой ШИМ-регулятор скорости для двигателя постоянного тока, изучая, как протекает ток в цепи и что делает каждый компонент. Вы даже можете построить схему самостоятельно!
Прокрутите вниз, чтобы посмотреть обучающее видео на YouTube.
Это простой контроллер скорости с широтно-импульсной модуляцией для двигателя постоянного тока, который использует один из них, таймер 555, и мы собираемся показать вам, как работает схема, как ее спроектировать и даже превратить в профессионала. ищу печатную плату. Вы даже можете скачать копию нашей печатной платы и собрать свою собственную ЗДЕСЬ.
ищу печатную плату. Вы даже можете скачать копию нашей печатной платы и собрать свою собственную ЗДЕСЬ.
Проектирование схемы
Сердцем нашей системы является таймер 555. Это компонент интегральной схемы, а это означает, что внутри него находится несколько более мелких компонентов, объединенных в один корпус, что значительно облегчает нашу работу как дизайнеров. Мы увидим, как этот компонент работает, когда будем строить схему.
Теперь мы собираемся использовать Altium Designer для этого проекта, который любезно спонсировал эту статью. Все наши зрители могут получить бесплатную пробную версию программы ЗДЕСЬ.
Мы начинаем новый проект и создаем нашу схему, а также файл платы. Затем нам нужно начать добавлять наши компоненты, мы можем использовать встроенный инструмент, но мы собираемся использовать надстройку, которая, по нашему мнению, немного упростит задачу. Находим компонент на сайте поставщиков, мы используем mouser, но вы можете использовать кого хотите.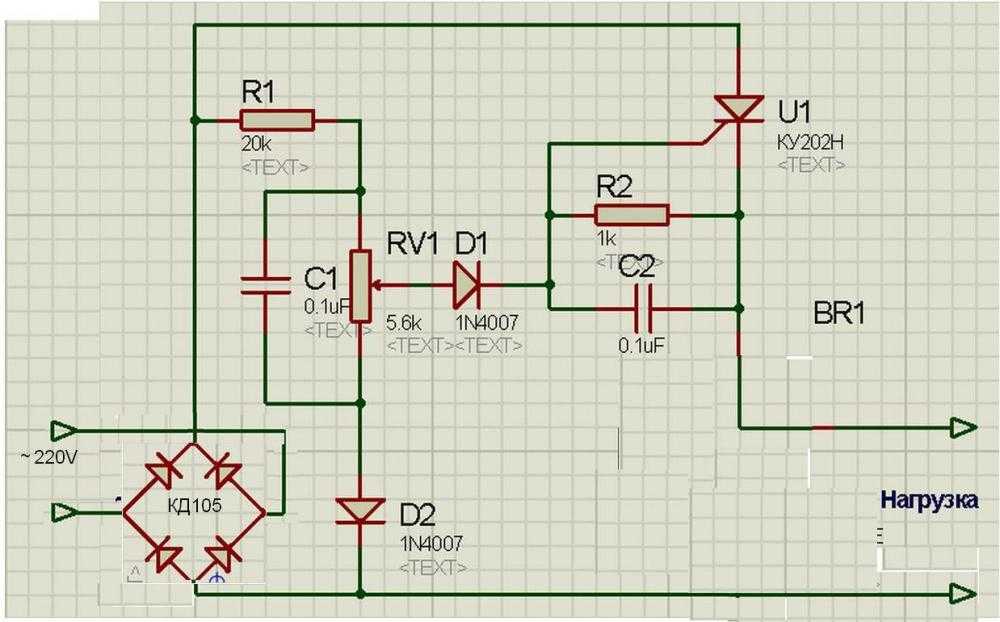
Мы нашли таймер 555, поэтому мы берем номер детали, вставляем его в загрузчик библиотеки и нажимаем «Поиск», он находит компонент, поэтому мы нажимаем «Добавить в дизайн».
Таймер 555 может выдерживать максимальную нагрузку около 200 миллиампер. Мы собираемся управлять одним из этих двигателей постоянного тока от источника питания 12 В, и мы видим, что при 12 В он потребляет ток около 1,4 А, и это без нагрузки, что уже больше, чем может выдержать таймер 555. Поэтому нам нужно будет использовать полевой МОП-транзистор, который представляет собой тип электронного переключателя.
Кстати, мы подробно рассмотрели, как работают двигатели постоянного тока в нашей предыдущей статье ЗДЕСЬ .
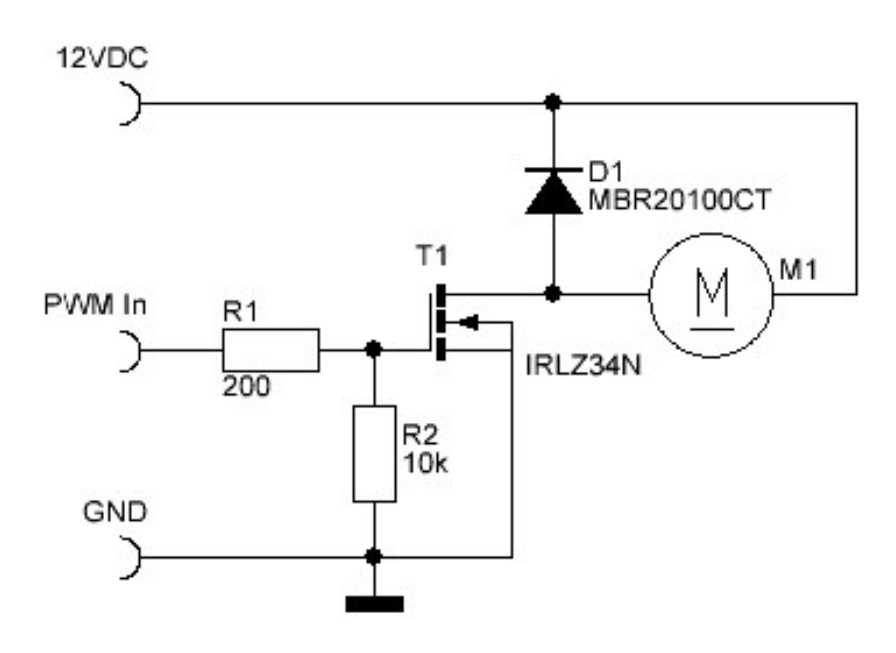
Мы собираемся использовать полевой МОП-транзистор IRFZ24N, потому что он может работать как с напряжением, так и с током, а также имеет низкое сопротивление сток-исток в открытом состоянии. Итак, мы находим этот компонент и добавляем его в схему. Двигатель будет подключен к выводу стока MOSFET, а вывод истока соединится с землей.
МОП-транзистор обычно блокирует ток, поэтому двигатель не вращается. Однако, если мы подадим небольшое напряжение на вывод затвора, это позволит протекать некоторому току. Чем выше приложенное напряжение, тем больший ток может протекать, и поэтому двигатель вращается быстрее.
Таймер 555 подает напряжение на контакт затвора MOSFET с контакта 3. Для изменения напряжения и управления скоростью двигателя он посылает его в виде импульсов. Каждый импульс длится определенный период времени, в течение которого будет сегмент, когда сигнал включен, поэтому подается напряжение, и сегмент, когда сигнал выключен, поэтому напряжение не подается. Таким образом, МОП-транзистор будет испытывать среднее напряжение для каждого периода времени. Чем шире импульс включения, тем выше будет среднее напряжение. Это широтно-импульсная модуляция, расчеты для которой вы можете увидеть далее в статье.
Ток на вывод затвора очень мал, но мы поместим резистор 1 кОм между выводом затвора MOSFET и выводом 3 таймера 555, это защитит компонент, ограничив ток, если MOSFET выйдет из строя, и пропустит ток вытекать из ворот.
Заряд электронов будет накапливаться на контакте затвора MOSFET, и нам нужно его разрядить, чтобы выключить, поэтому мы помещаем еще один резистор на 1 кОм и подключаем его к земле, что обеспечивает путь разряда.
Я хочу подключить двигатель и источник питания снаружи от печатной платы, поэтому теперь я добавлю клемму для входа и еще одну для подключения двигателя. Я также хочу, чтобы встроенный переключатель включал и выключал контроллер, поэтому я нашел подходящий переключатель и добавил его. Теперь мы подключим входную клемму к земле, а затем подключим источник питания к переключателю. Затем мы подключаем выход переключателя к клемме двигателя. Затем подключите клемму двигателя к сливному штырьку MOSFET.
Электродвигатель состоит из витков проволоки, поэтому мы можем считать его катушкой индуктивности. Когда катушки индуктивности включены, они накапливают энергию в своем магнитном поле, когда мощность отключается, это магнитное поле разрушается, и катушка индуктивности выталкивает электроны через цепь. Это вызывает очень большой и внезапный всплеск энергии, который может повредить нашу цепь. Поэтому мы добавляем обратноходовой диод, который обеспечивает путь для безопасной циркуляции и уменьшения энергии. Для этого мы используем диод 1N4007, который выдерживает большой пиковый ток. Итак, мы добавляем это в схему.
Это вызывает очень большой и внезапный всплеск энергии, который может повредить нашу цепь. Поэтому мы добавляем обратноходовой диод, который обеспечивает путь для безопасной циркуляции и уменьшения энергии. Для этого мы используем диод 1N4007, который выдерживает большой пиковый ток. Итак, мы добавляем это в схему.
Мы подробно рассмотрели катушки индуктивности, диоды и транзисторы в наших предыдущих статьях ЗДЕСЬ – Катушки индуктивности, диоды, транзисторы.
Теперь мы можем подключить контакт 8 таймера 555, который является источником питания компонентов, и мы подключаем его к плюсу. Затем подключаем контакт 1 к земле.
Внутри таймера у нас есть три резистора по 5 кОм между выводами 1 и 8, напряжение уменьшается на треть (1/3) после каждого резистора. Поскольку у нас есть 12 вольт на контакте 8, напряжение уменьшится до 8 вольт после первого резистора, а затем до 4 вольт после второго резистора. Таймер 555 использует их в качестве эталона.
К резисторам подключены два компаратора. Компаратор имеет положительный и отрицательный вход, а также один выход. Первый компаратор подключен к резисторам через отрицательный вход. Положительный вход подключен к контакту 6, пороговому контакту. Компаратор 2 подключен к резисторам через положительный вход. Его отрицательный вход подключен к контакту 2, триггерному контакту.
Компаратор имеет положительный и отрицательный вход, а также один выход. Первый компаратор подключен к резисторам через отрицательный вход. Положительный вход подключен к контакту 6, пороговому контакту. Компаратор 2 подключен к резисторам через положительный вход. Его отрицательный вход подключен к контакту 2, триггерному контакту.
Теперь компараторы подключены к двум разным напряжениям, поэтому он может их сравнивать. Если положительное входное напряжение выше отрицательного, он выдает высокий сигнал или положительное напряжение. Если отрицательное входное напряжение равно или выше положительного входного напряжения, на выходе будет низкий сигнал или нулевое напряжение.
Соединим контакты 2 и 6 вместе, чтобы напряжение было одинаковым. Выход компараторов подключается к другому внутреннему компоненту, называемому триггером. Первый компаратор подключается к входу «сброс», второй компаратор подключается к входу «установка». Существует также вывод с именем «не Q». Когда триггер получает высокий уровень сигнала от компаратора 1, он выдает высокий уровень сигнала. Когда триггер получает высокий сигнал от компаратора 2, он выдает низкий сигнал. Если оба компаратора обеспечивают низкий уровень сигнала, триггер остается неизменным и продолжает работу. Затем он проходит через другой компонент, называемый инвертором, который просто инвертирует полученный сигнал.
Когда триггер получает высокий сигнал от компаратора 2, он выдает низкий сигнал. Если оба компаратора обеспечивают низкий уровень сигнала, триггер остается неизменным и продолжает работу. Затем он проходит через другой компонент, называемый инвертором, который просто инвертирует полученный сигнал.
Если это кажется запутанным, не волнуйтесь, это станет понятным через мгновение, когда мы будем проходить схему.
Если подать небольшое напряжение, скажем, 3,9 В на контакты 2 и 6, компаратор 1 выдаст низкий уровень сигнала, а компаратор 2 выдаст высокий сигнал. Это устанавливает временной интервал для начала. Триггер выдает низкий сигнал. Инвертор выдает высокий уровень сигнала.
Как повышаем напряжение, например до 6 вольт. Компаратор 1 и 2 будут выдавать сигнал низкого уровня, триггер остается неизменным, отсчет времени продолжается. Но при напряжении 8 вольт компаратор 1 выдает высокий сигнал, а компаратор 2 выдает низкий сигнал. Выход триггера теперь меняется на противоположный, и на выходе высокий уровень. Это сбрасывает время.
Это сбрасывает время.
Выход триггера остается неизменным до тех пор, пока напряжение не упадет примерно до 4 вольт, где компаратор 1 выдает низкий уровень сигнала, а компаратор 2 выдает высокий сигнал, это снова запускает таймер.
Итак, мы видим, что по мере увеличения и уменьшения напряжения на выводах 2 и 6 изменяется выход таймера 555. Итак, чтобы контролировать напряжение и, следовательно, временной интервал, мы подключаем контакты 2 и 6 к конденсатору.
Когда мы подключаем конденсатор к источнику питания, он мгновенно достигает напряжения батареи. Но если мы подключим его через резистор, резистор замедлит время зарядки. Чем больше резистор, тем больше времени требуется, чтобы зарядить напряжение.
Итак, чтобы зарядить наш конденсатор, мы будем использовать фиксированный резистор на 1 кОм и потенциометр на 100 кОм. Потенциометр представляет собой переменный резистор, поэтому мы можем изменять время зарядки конденсатора. Нам также потребуется разрядить конденсатор, чтобы перезапустить таймер. Итак, мы добавим два диода, чтобы создать отдельный путь заряда и разряда. Ток в этой части цепи очень мал, так как резисторы находятся в килоомном диапазоне. Мы будем использовать два диода 1N4148, которые имеют прямой ток около 300 миллиампер, что подойдет для этого приложения.
Итак, мы добавим два диода, чтобы создать отдельный путь заряда и разряда. Ток в этой части цепи очень мал, так как резисторы находятся в килоомном диапазоне. Мы будем использовать два диода 1N4148, которые имеют прямой ток около 300 миллиампер, что подойдет для этого приложения.
Конденсатор будет керамическим конденсатором емкостью 10 нанофарад, через мгновение мы поймем почему. Итак, мы добавляем эти компоненты в схему, затем подключаем диоды к постоянному резистору, а диоды к контактам 1 и 3 потенциометра. Затем подключаем конденсатор к земле, а также к контактам 2 и 6 таймера 555, а также к контакту 2 потенциометра.
Контакт 7 является разрядным контактом, который подключен к нашему конденсатору времени. Внутри таймера 555 выход триггера соединяется с выводом затвора внутреннего транзистора. Это контролирует поток тока от конденсатора к земле. Когда на выходе триггера низкий уровень, транзистор закрыт, поэтому конденсатор заряжается, и напряжение начинает увеличиваться.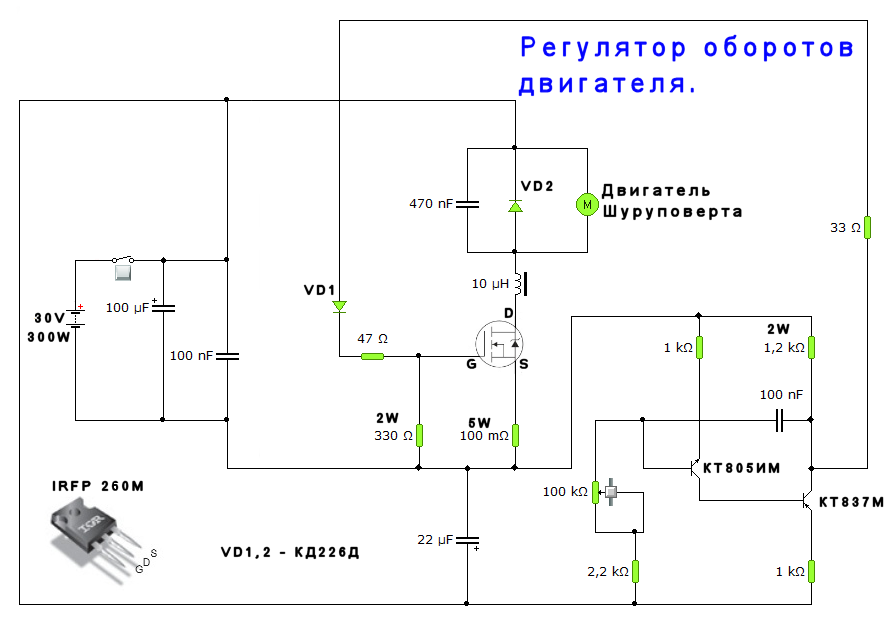 Когда напряжение увеличивается настолько, что на выходе триггера появляется высокий уровень, открывается транзистор, который разряжает конденсатор, и, таким образом, напряжение уменьшается. Когда оно достигает 4 Вольт, конденсатор снова начинает заряжаться, когда он достигает 8 Вольт, он разряжается.
Когда напряжение увеличивается настолько, что на выходе триггера появляется высокий уровень, открывается транзистор, который разряжает конденсатор, и, таким образом, напряжение уменьшается. Когда оно достигает 4 Вольт, конденсатор снова начинает заряжаться, когда он достигает 8 Вольт, он разряжается.
Вы можете узнать, как работают конденсаторы в нашей предыдущей статье ЗДЕСЬ
У нас также есть контакт 5, который является управляющим напряжением. Мы можем использовать это, чтобы переопределить компаратор 1. Нам это не нужно для этой схемы, поэтому мы подключаем его к земле через керамический конденсатор емкостью 0,1 мкФ. Заземление этого вывода предотвращает случайное переопределение, а конденсатор отфильтровывает любой шум или частоту.
У нас также есть контакт 4, контакт сброса, который мы соединим с плюсом схемы. Мы могли бы использовать это, чтобы переопределить и сбросить триггер, отключив питание. Нам это не нужно для этой схемы, поэтому она подключена к плюсу.
Итак, при зарядке ток течет через резистор, диод и левую часть потенциометра к конденсатору. На выходе триггера низкий уровень, поэтому разрядный транзистор закрыт. Контакт 3 выводит высокий сигнал.
Как только конденсатор заряжается до 8 В, на выходе триггера становится высокий уровень, который включает транзистор, и конденсатор разряжается через правую сторону потенциометра и диода. Контакт 3 выводит сигнал низкого уровня.
Транзистор остается открытым, поэтому конденсатор разряжается до тех пор, пока не достигнет 4 В, после чего триггер снова меняет направление, выключая транзистор и снова запуская отсчет времени. Этот цикл повторяется непрерывно. Конденсатор заряжается и разряжается, создавая пилообразную волну, а таймер 555 выдает прямоугольную волну с широтно-импульсной модуляцией.
Мы можем рассчитать производительность следующим образом.
Конденсатор заряжается через резистор R1 и левую сторону потенциометра. Таким образом, время зарядки рассчитывается по этой формуле. Если предположить, что потенциометр был на 50%. Тогда мы получим 0,35 миллисекунды.
Если предположить, что потенциометр был на 50%. Тогда мы получим 0,35 миллисекунды.
Конденсатор разряжается через правую часть потенциометра, поэтому время разрядки рассчитывается по этой формуле. Это дает нам 0,34 миллисекунды.
Каждый цикл представляет собой комбинацию времени включения и выключения, поэтому 0,35 плюс 0,34 дает нам 0,69.миллисекунды.
Частота равна 1, деленной на время цикла, что дает нам 1428 Гц.
Мы используем конденсатор емкостью 10 нанофарад, потому что он обеспечивает очень высокую частоту, а двигатель постоянного тока лучше всего работает на высокой частоте. Если бы мы использовали очень большой конденсатор, например, 100 микрофарад, частота падала бы до 0,14 Герца, и каждый цикл выполнялся бы за 7 секунд. Таким образом, вы можете использовать конденсаторы других размеров, но учтите, как это повлияет на скорость двигателя.
Хорошо, теперь я создам простой прототип на макетной плате, чтобы проверить, все ли работает. Вроде нормально, скорость можно регулировать, так что будем доделывать дизайн печатной платы.
Добавляем аннотации. Затем мы импортируем компоненты в файл проекта печатной платы и тратим некоторое время на перестановку компонентов на плате. Когда все будет готово, мы обрисовываем доску и преобразуем ее в «защиту». Затем определите форму платы. Мы добавляем текст на клеммы, чтобы знать полярность цепи, когда будем ее использовать. Затем мы будем использовать функцию автоматического маршрута, чтобы соединить все. Как только он будет завершен, мы увеличим ширину маршрутов, которые будут нести более высокое напряжение и ток. Увеличение до 1 мм должно быть в порядке. Вероятно, нам нужно будет переместить некоторые маршруты в лучшее место, так что проверьте свой дизайн. После того, как мы удовлетворены, мы создаем наш полигон. И, наконец, мы можем экспортировать наши файлы gerber.
Изготовление печатной платы
Итак, теперь мы готовы к печати нашей печатной платы.
Мы собираемся использовать JLC PCB для печати нашей печатной платы, которая также любезно спонсировала это видео. Они предлагают исключительную ценность с 5 печатными платами всего за 2 доллара. Обязательно посмотрите их, я оставлю для вас ссылку в описании видео.
Они предлагают исключительную ценность с 5 печатными платами всего за 2 доллара. Обязательно посмотрите их, я оставлю для вас ссылку в описании видео.
Не забудьте, что вы можете скачать мои файлы дизайна, снова ссылки в описании видео для этого.
Итак, мы просто авторизуемся и загрузим наш gerber-файл. Через несколько секунд он генерирует предварительный просмотр схемы на экране. Затем мы можем настроить дизайн с помощью различных цветов и материалов и т. д. Но я оставлю их по умолчанию и сохраню в корзину. Затем мы идем к кассе, заполняем наши почтовые данные, а затем выбираем вариант почтовых расходов. Я лично хочу, чтобы это было очень быстро, поэтому я выбираю экспресс-почту, которая дороже, вы можете выбрать более медленные методы, чтобы сэкономить на расходах. Затем отправляем заказ и оплачиваем.
Через несколько дней наша плата приходит по почте. Доски выглядят отлично, я очень доволен результатом.
Итак, начинаем припаивать компоненты к плате. Я начинаю с центра и продвигаюсь вперед. Я использую держатель для таймера 555, который предотвратит повреждение компонента от перегрева и позволит нам легко заменить компонент в случае неисправности. С такими сложными компонентами, как этот, мы можем использовать ленту, чтобы держать их на месте, пока мы их припаиваем.
Я использую держатель для таймера 555, который предотвратит повреждение компонента от перегрева и позволит нам легко заменить компонент в случае неисправности. С такими сложными компонентами, как этот, мы можем использовать ленту, чтобы держать их на месте, пока мы их припаиваем.
Таким образом, мы припаиваем все компоненты на свои места, используя ленту везде, где это необходимо. И через несколько минут у нас должна получиться идеально выглядящая печатная плата.
Теперь для теста подключаем стендовый блок питания и двигатель к плате. Затем включите питание. Я включаю плату, чтобы подать на нее питание, а затем, когда я настраиваю потенциометр, вал двигателя начинает вращаться. Скорость вращения может быть увеличена или уменьшена очень легко. Итак, у нас есть очень простой контроллер скорости двигателя постоянного тока с широтно-импульсной модуляцией.
Посмотрите один из видеороликов на экране, чтобы продолжить изучение электроники, и я встречусь с вами на следующем уроке. Не забудьте подписаться на нас в facebook, instagram, linkedin, а также на engineering mindset.com
Не забудьте подписаться на нас в facebook, instagram, linkedin, а также на engineering mindset.com
Как работает бесщеточный двигатель постоянного тока? Объяснение BLDC и ESC
В этом уроке мы узнаем, что такое бесщеточный двигатель постоянного тока или BLDC и как он работает. Мы также расскажем, как работает электронный регулятор скорости или ESC, электронная схема, используемая для управления бесколлекторными двигателями.
Это статья из двух частей, в первой части мы изучим принцип работы бесколлекторного двигателя постоянного тока и ESC (электронного регулятора скорости), а во второй части узнаем, как управлять бесщеточным двигателем постоянного тока с помощью Arduino.
Вы можете посмотреть следующее видео или прочитать письменный учебник ниже.
Что такое бесщеточный двигатель постоянного тока?
Бесщеточный двигатель постоянного тока или BLDC представляет собой электродвигатель, работающий от постоянного тока и генерирующий движение без каких-либо щеток, как в обычных двигателях постоянного тока.
Бесщеточные двигатели более популярны в настоящее время, чем обычные коллекторные двигатели постоянного тока, поскольку они имеют более высокий КПД, могут обеспечивать точное управление крутящим моментом и скоростью вращения, а также отличаются высокой надежностью и низким электрическим шумом благодаря отсутствию щеток.
Двигатели постоянного тока BLDC используются в приложениях, где требуется эффективность и долговечность, таких как стиральные машины, кондиционеры и другая бытовая электроника. Также они используются в жестких дисках, радиоуправляемых моделях, таких как радиоуправляемые самолеты и так далее.
Как работает бесщеточный двигатель постоянного тока?
Бесщеточный двигатель (BLDC) состоит из двух основных частей: статора и ротора. Для этой иллюстрации ротор представляет собой постоянный магнит с двумя полюсами, а статор состоит из катушек, расположенных, как показано на рисунке ниже.
Для этой иллюстрации ротор представляет собой постоянный магнит с двумя полюсами, а статор состоит из катушек, расположенных, как показано на рисунке ниже.
Все мы знаем, что если подать ток через катушку, она создаст магнитное поле, а линии или полюса магнитного поля зависят от направления тока.
Итак, если мы применим соответствующий ток, катушка создаст магнитное поле, которое будет притягивать постоянный магнит ротора. Теперь, если мы активируем каждую катушку одну за другой, ротор будет продолжать вращаться из-за силового взаимодействия между перманентом и электромагнитом.
Чтобы повысить КПД двигателя, мы можем намотать две противоположные катушки как одну катушку таким образом, чтобы полюса были противоположны полюсам ротора, таким образом, мы получим двойную силу притяжения.
С помощью этой конфигурации мы можем создать шесть полюсов на статоре всего с тремя катушками или фазой. Мы можем еще больше повысить эффективность, подав питание на две катушки одновременно. Таким образом, одна катушка будет притягивать, а другая — отталкивать ротор.
Таким образом, одна катушка будет притягивать, а другая — отталкивать ротор.
Для того, чтобы ротор совершил полный цикл на 360 градусов, необходимо шесть шагов или интервалов.
Если мы посмотрим на форму волны тока, то увидим, что в каждом интервале есть одна фаза с положительным током, одна фаза с отрицательным током, а третья фаза отключена. Это наводит на мысль, что мы можем соединить свободные конечные точки каждой из трех фаз вместе и, таким образом, мы можем разделить ток между ними или использовать один ток для питания двух фаз одновременно.
Вот пример. Если мы подтянем фазу A High или подключим ее к положительному постоянному напряжению с помощью какого-либо переключателя, например MOSFET, а с другой стороны соединим фазу B с землей, то ток будет течь от VCC через фазу А, нейтральную точку и фазу В, на землю. Итак, с помощью всего лишь одного потока тока мы создали четыре разных полюса, которые заставляют ротор двигаться.
В этой конфигурации у нас фактически есть соединение фаз двигателя звездой, где нейтральная точка соединена внутри, а остальные три конца фаз выходят из двигателя, поэтому из бесщеточного двигателя выходят три провода.
Итак, для того, чтобы ротор прошел полный цикл, нам просто нужно активировать правильные два полевых МОП-транзистора в каждом из 6 интервалов, и для этого на самом деле все ESC.
Как работает ESC (электронный регулятор скорости)
ESC или электронный регулятор скорости управляет движением или скоростью бесколлекторного двигателя, активируя соответствующие МОП-транзисторы для создания вращающегося магнитного поля, заставляющего двигатель вращаться. Чем выше частота или чем быстрее ESC проходит через 6 интервалов, тем выше будет скорость двигателя.
Однако возникает важный вопрос: как узнать, когда какую фазу активировать. Ответ заключается в том, что нам нужно знать положение ротора, и есть два распространенных метода, используемых для определения положения ротора.
Первый распространенный метод заключается в использовании датчиков Холла, встроенных в статор, расположенных под углом 120 или 60 градусов друг к другу.
Когда постоянные магниты ротора вращаются, датчики Холла воспринимают магнитное поле и генерируют логический «высокий» для одного магнитного полюса или логический «низкий» для противоположного полюса. В соответствии с этой информацией ESC знает, когда активировать следующую коммутационную последовательность или интервал.
В соответствии с этой информацией ESC знает, когда активировать следующую коммутационную последовательность или интервал.
Второй распространенный метод, используемый для определения положения ротора, заключается в измерении обратной электродвижущей силы или обратной ЭДС. Обратная ЭДС возникает в результате прямо противоположного процесса генерации магнитного поля или когда движущееся или изменяющееся магнитное поле проходит через катушку, оно индуцирует ток в катушке.
Таким образом, когда движущееся магнитное поле ротора проходит через свободную катушку или ту, которая не активна, оно индуцирует ток в катушке, и в результате в этой катушке возникает падение напряжения. ESC фиксирует эти падения напряжения по мере их возникновения и на их основе прогнозирует или рассчитывает, когда должен произойти следующий интервал.
Таков основной принцип работы бесколлекторных двигателей постоянного тока и регуляторов скорости, и он останется тем же, даже если мы увеличим количество полюсов как ротора, так и статора. У нас по-прежнему будет трехфазный двигатель, только количество интервалов увеличится, чтобы совершить полный цикл.
У нас по-прежнему будет трехфазный двигатель, только количество интервалов увеличится, чтобы совершить полный цикл.
Здесь мы также можем упомянуть, что двигатели BLDC могут быть инраннерами или аутраннерами. Бесщеточный двигатель с внутренним ротором имеет постоянные магниты внутри электромагнитов, и наоборот, двигатель с наружным ротором имеет постоянные магниты снаружи электромагнитов. Опять же, они используют один и тот же принцип работы, и каждый из них имеет свои сильные и слабые стороны.
Связано: Шаговые двигатели и Arduino. Полное руководство
Демонстрация работы BLDC и ESC
Хорошо, достаточно теории, а теперь давайте продемонстрируем и посмотрим на то, что мы объяснили выше, в реальной жизни. Для этого мы подключим три фазы бесщеточного двигателя к осциллографу. Я подключил 3 резистора в одной точке, чтобы создать виртуальную нейтральную точку, а с другой стороны я подключил их к трем фазам двигателя BLDC.
Первое, что мы можем заметить, это три синусоиды. Эти синусоидальные волны на самом деле являются обратными EFM, генерируемыми в фазах, когда они не активны.
Эти синусоидальные волны на самом деле являются обратными EFM, генерируемыми в фазах, когда они не активны.
Мы видим, что при изменении оборотов двигателя частота синусоидальных волн меняется, а также их амплитуда. Чем выше число оборотов, тем выше частота и амплитуда синусоидальных волн противоЭДС. Однако то, что приводит в движение двигатель, на самом деле эти пики, которые являются активными фазами, которые генерируют изменяющееся магнитное поле.
Мы можем заметить, что на каждом интервале есть две активные и одна неактивная фаза. Например, здесь у нас активны фазы A и B, а фаза C неактивна. Затем у нас активны фазы A и C, а фаза B неактивна и так далее.
Заключение
Итак, мы рассмотрели основной принцип работы бесщеточного двигателя и то, как он работает в сочетании с ESC. Если вы хотите больше реальных живых примеров и узнать, как управлять бесколлекторными двигателями с помощью Arduino, вам следует прочитать вторую часть этого руководства.
Здесь вы можете ознакомиться с некоторыми из моих проектов, в которых я использовал двигатели BLDC:
- Радиоуправляемый самолет Arduino | 100% DIY
- DIY на базе Arduino RC Hovercraft
Надеюсь, вам понравился этот урок и вы узнали что-то новое.