Регуляторы скорости вращения вентиляторы, оборотов
Вид оборудования
Регулятор скорости симисторный Регулятор скорости трансформаторный Регулятор скорости частотныйУправление
не предусмотрено 0…10v – сигнал на панели на панели, кнопки, ЖК дисплей кнопки, LED дисплей, доп.
Напряжение питания
220v, AC, 1 фаза 380v, AC, 3 фазы 380v, AC, 2 фазыВыходное напряжение
220v, AC, 1 фаза 220v, AC, 3 фазы 380v, AC, 3 фазы 80–105–130–160–230v 130–145–185–240–400vНазначение
Для вентиляторовИсполнение
Бескорпусный На DIN рейку НастенныеПанель
нет LED дисплей потенциометр доп.
Сбросить фильтр
- Новые и популярные
- Название
- Цена
- Хиты продаж
- Оценка покупателей
- Дата добавления
- В наличии
- 1 995 ₽ MTY теперь в вашей корзине покупок
-
14 000 ₽
INNOVERT VENT теперь в вашей корзине покупок -
2 175 ₽
-
3 000 ₽
VRS . .. D теперь в вашей корзине покупок
.. D теперь в вашей корзине покупок
-
3 700 ₽
ZC-OCL дроссель трехфазный теперь в вашей корзине покупок -
27 150 ₽
FC 51 теперь в вашей корзине покупок -
6 300 ₽
RS-6 теперь -
0 ₽
SB теперь в вашей корзине покупок -
1 050 ₽
VLT-LCP теперь в вашей корзине покупок -
2 850 ₽
ARTE теперь в вашей корзине покупок -
6 225 ₽
FC 51 (220В) теперь в вашей корзине покупок -
-
8 625 ₽
IDS-Drive Z теперь в вашей корзине покупок -
16 592 ₽
РСВТ теперь в вашей корзине покупок -
6 624 ₽
IDS-Drive Z (220В) теперь в вашей корзине покупок -
0 ₽
СРМ теперь в вашей корзине покупок -
9 177 ₽
IDS-Drive E теперь в вашей корзине покупок -
2 625 ₽
RG5-AR теперь в вашей корзине покупок -
7 950 ₽
ODS теперь в вашей корзине покупок -
7 797 ₽
IDS-Drive E (220В) теперь в вашей корзине покупок -
15 750 ₽
ODST теперь в вашей корзине покупок -
0 ₽
OVS теперь в вашей корзине покупок -
17 100 ₽
UVS теперь в вашей корзине покупок -
2 925 ₽
ARTT теперь в вашей корзине покупок -
21 750 ₽
VRTT-L теперь в вашей корзине покупок -
17 100 ₽
OVTE теперь в вашей корзине покупок -
41 250 ₽
OVTT теперь в вашей корзине покупок -
17 700 ₽
VRCE теперь в вашей корзине покупок -
32 250 ₽
VRCT-L теперь в вашей корзине покупок -
14 625 ₽
VRDE теперь в вашей корзине покупок
 .. D теперь в вашей корзине покупок
.. D теперь в вашей корзине покупок
- 1
- 2
- Следующая »
Регуляторы скорости предназначены для точной настройки производительности вентиляторов.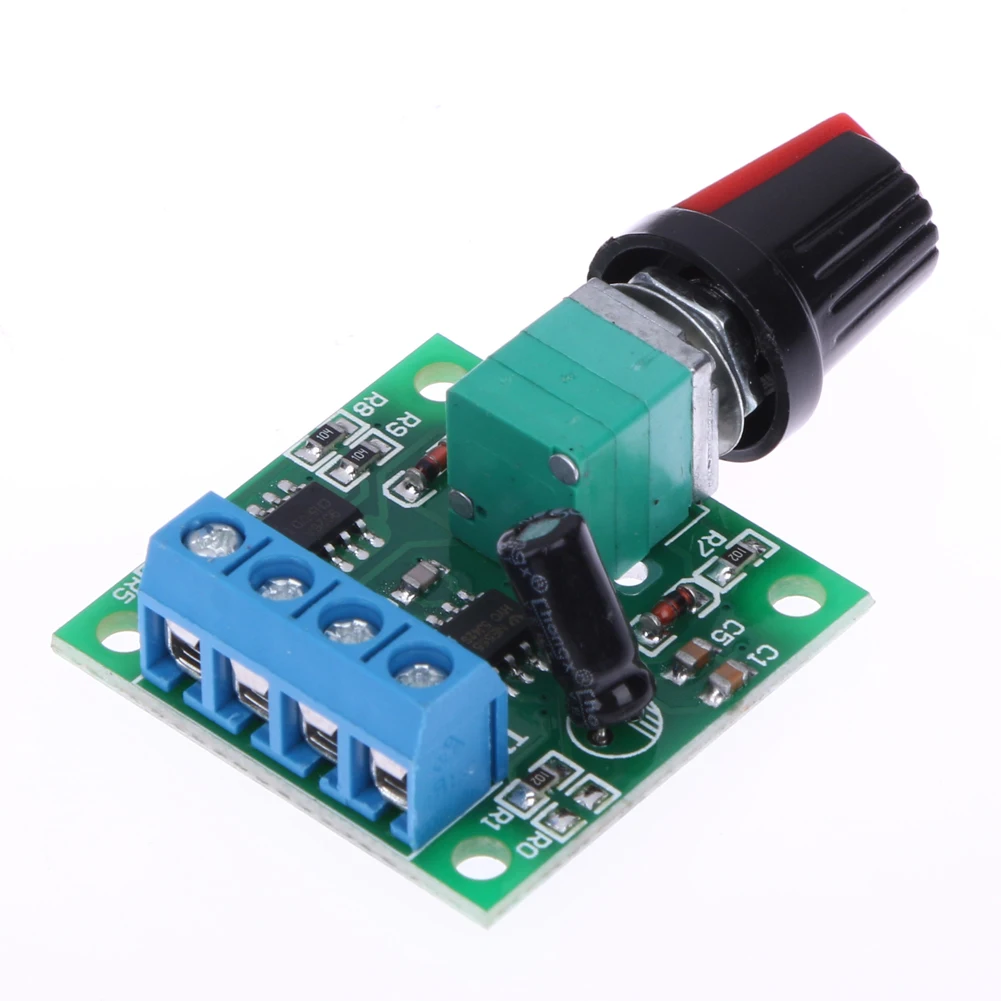 Изменять скорость вращения асинхронного двигателя вентилятора можно путем изменения амплитуды или частоты питающего напряжения. Для “вентиляторной” нагрузки вполне эффективны регуляторы напряжения. С их помощью можно снизить амплитуду питающего напряжения, тем самым можно уменьшить скорость вращения двигателя.
Изменять скорость вращения асинхронного двигателя вентилятора можно путем изменения амплитуды или частоты питающего напряжения. Для “вентиляторной” нагрузки вполне эффективны регуляторы напряжения. С их помощью можно снизить амплитуду питающего напряжения, тем самым можно уменьшить скорость вращения двигателя.
Наиболее распространены симисторные регуляторы скорости вентилятора. Они легкие, надежные, недорогие и очень распространенные. Обычно их применяют для плавного снижения уровня напряжения однофазной сети 220В. Изза того, что на выходе таких устройств не чистая синусоида, а “пилообразные” импульсы, для них характерны повышенные шумы на низких оборотах. Шумят и двигатели и регуляторы. В какой то мере лишены такого недостатка устройства на автотрансформаторах, а также “электронные” трансформаторы, которые формируют синусоидальное питающее напряжение методом широтно-импульсной модуляции.
Наиболее эффективны и многофункциональны – частотные регуляторы скорости. Эти устройства позволяют менять скорость вращения двигателя в очень широких пределах.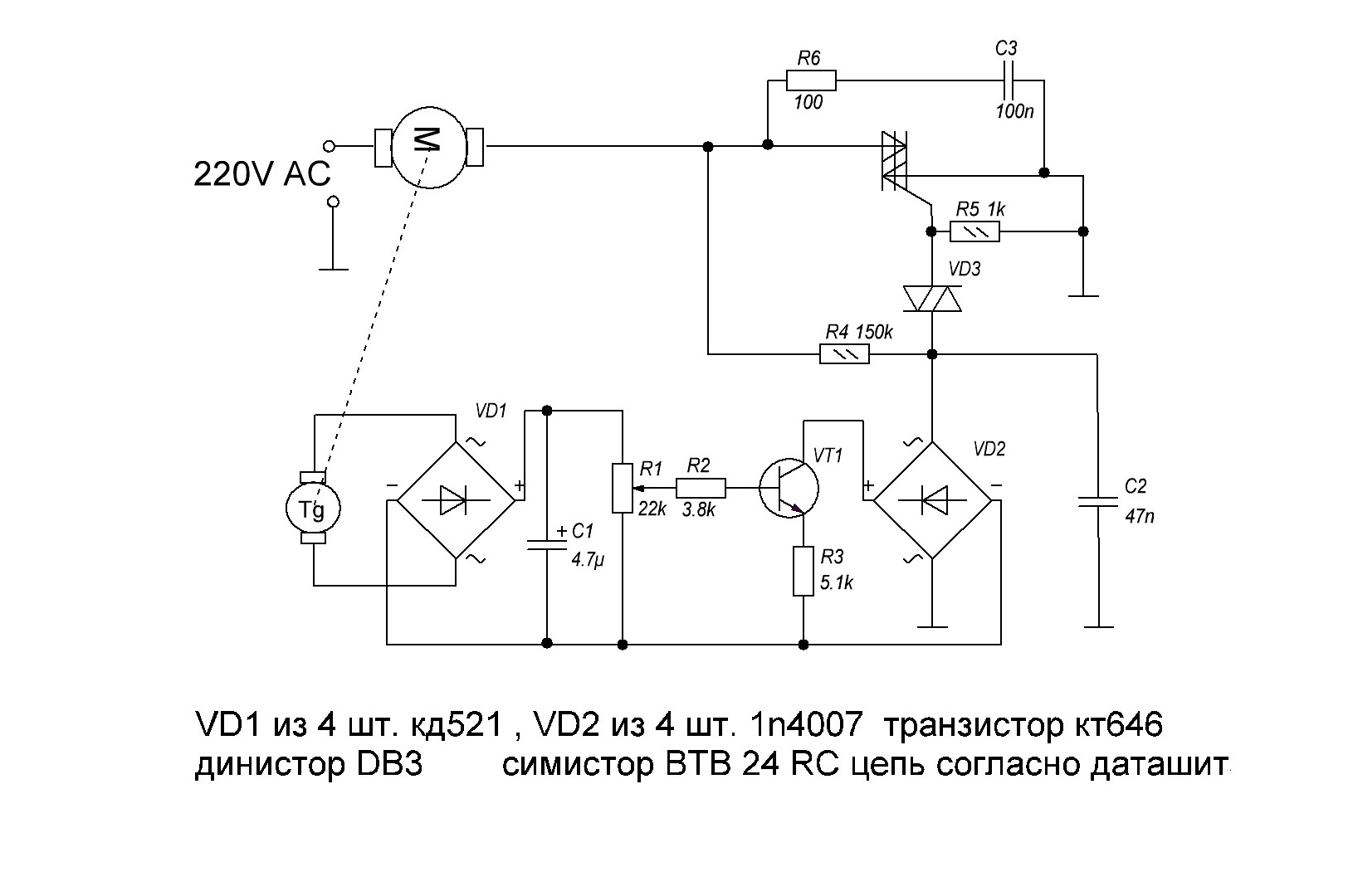 Причем не только в сторону уменьшения скорости, но и путем ее увеличения. Большинство продаваемых частотных регуляторов снабжены развитыми средствами контроля параметров двигателя. Поэтому применение “частотника” делает систему потенциально надежнее и безопаснее.
Причем не только в сторону уменьшения скорости, но и путем ее увеличения. Большинство продаваемых частотных регуляторов снабжены развитыми средствами контроля параметров двигателя. Поэтому применение “частотника” делает систему потенциально надежнее и безопаснее.
Мы продаем частотные, симисторные и трансформаторныеустройства с доставкой из Челябинска. Отправляем заказы в регионы РФ. Доставка до офиса ТК — за наш счет. По предварительной договоренности привезем товар силами компании. Забрать покупку можно лично. Адрес пункта выдачи в Челябинске — ул. Каслинская, 1.
Регулятор скорости вращения вентилятора FASEC 33 в сборе
- Холодильное оборудование
- Контроллеры
5 866,09 P / шт
с НДС актуально на 30. 06.23
06.23
цена не является публичной офертой.
61,68 евро
цена в рублях привязана к курсу евро и обновляется ежедневно
| Артикул | FA53370003 |
| id товара | 10151 |
| Страна | Италия |
| Минимальный заказ | 1 шт |
| В наличии на складах | 20+ шт |
Выберите город доставки: Москва
Выберите способ доставки:
Деловые линии
Самовывоз
| Склад | В наличии на складе | Цена за ед. без доставки | Цена доставки | Срок доставки, дней | Сколько нужно, шт | Стоимость с доставкой | ||
|---|---|---|---|---|---|---|---|---|
| Москва10 | 4 шт | 5866,09 | ||||||
| Санкт-Петербург | 20+ шт | 5866,09 | ||||||
| Санкт-Петербург8 | 3 шт | 5866,09 | ||||||
| Воронеж | 1 шт | 5991,64 | ||||||
| Ростов-на-Дону | 1 шт | 6033,86 | ||||||
| Краснодар | 1 шт | 6033,86 | ||||||
| Казань2 | 12 шт | 6033,86 | ||||||
| Самара | 2 шт | 6033,86 | ||||||
| Екатеринбург3 | 1 шт | 6033,86 | ||||||
| Омск | 4 шт | 6074,94 | ||||||
| Новосибирск | 1 шт | 6074,94 | ||||||
| Красноярск | 5 шт | 6117,17 | ||||||
| Иркутск | 2 шт | 6159,40 |
Общее описание
Fasec 33 это однофазный регулятор скорости вращения асинхронного электродвигателя, работающий по принципу уменьшения действующего напряжения, методом обрезания фазы в режиме “мастер” получая сигнал от датчика температуры.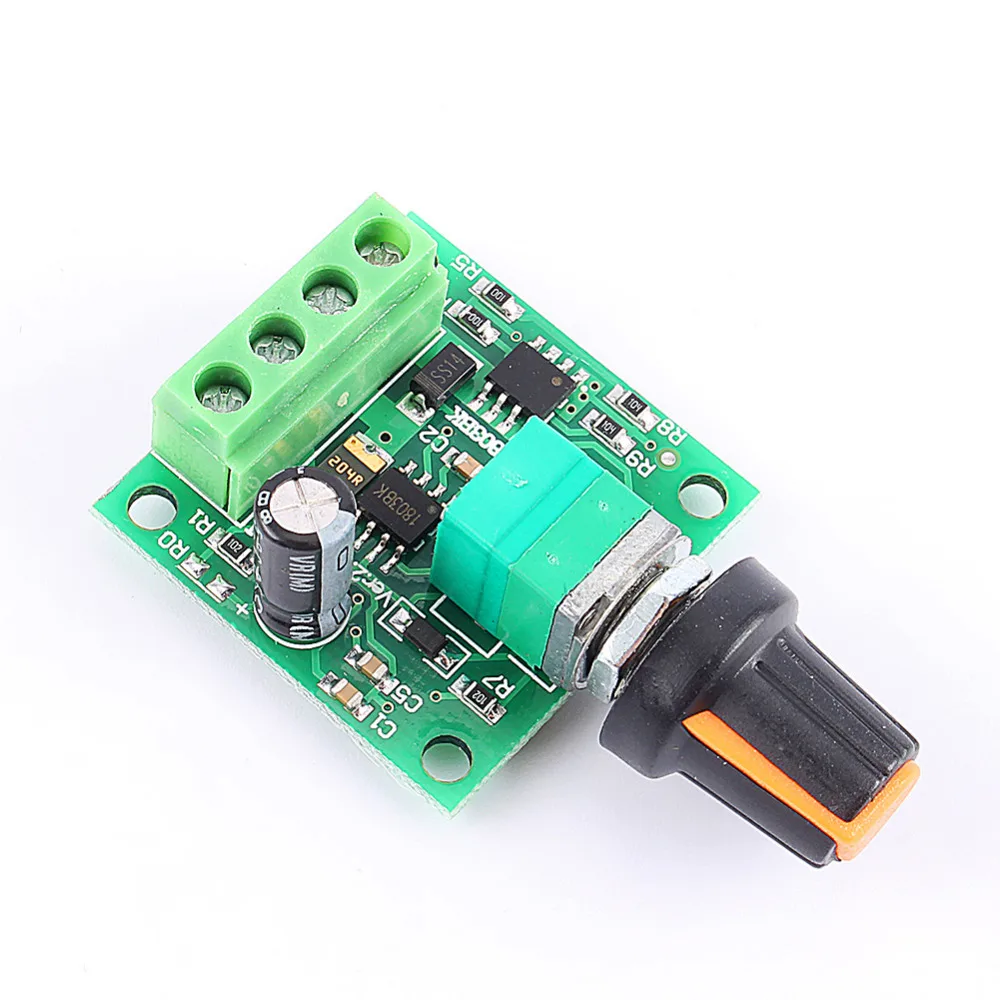 Область применение- регулирования оборотов вентилятора конденсатора холодильной установки в зависимости от температуры конденсации. Напряжение питания 220В/50Гц, максимальный ток выхода из регулятора 2,5А. Поставляется с датчиком PTC в комплекте. Имеет три регулятора, один для настройки рабочего диапазона регулирования по температуре DT (100% speed), второй устанавливает температуру при которой вентилятор будет иметь минимальные обороты (0% speed), третий задает минимальную скорость вращения (min-max).
Область применение- регулирования оборотов вентилятора конденсатора холодильной установки в зависимости от температуры конденсации. Напряжение питания 220В/50Гц, максимальный ток выхода из регулятора 2,5А. Поставляется с датчиком PTC в комплекте. Имеет три регулятора, один для настройки рабочего диапазона регулирования по температуре DT (100% speed), второй устанавливает температуру при которой вентилятор будет иметь минимальные обороты (0% speed), третий задает минимальную скорость вращения (min-max).
характеристикиЧертежи
и схемыДополнительная
информацияАналоги
Характеристика
| Производитель | Eliwell |
| Назначение | Прочие |
| Напряжение питания | 220 V |
| Диапазон настройки, С | 0…60 |
| Тип настройки | регулируемая |
| Применяемые хладагенты | любые |
| Вес, кг | 0,5 |
Чертежи
Схема подключения Fasec 33Дополнительная информация
Инструкция Fasec 33 (0.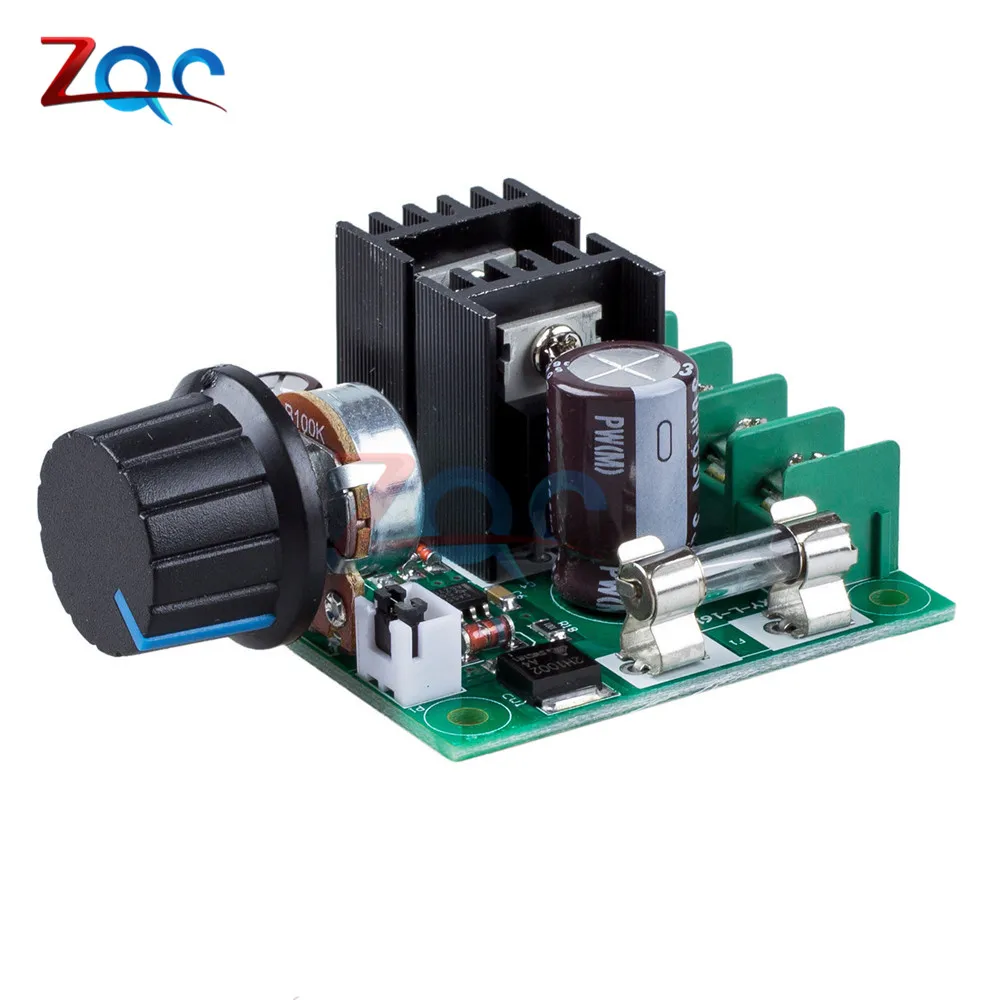 08Mb)
08Mb)
Полезные ссылки
Сайт производителя Eliwell
Аналоги
Мы не гарантируем 100% совместимости аналогов. Сравнение носит рекомендательный характер. Для подтверждения 100% совместимости требуется консультация специалиста !!!
Регулятор скорости Dixell XV105D -50DN0 NTC 230V DIR.
- Артикул: X0V5ABZXI500-S00
- Страна: Италия
- В наличии: нет
Электронные регуляторы скорости вращения (фазорезки) серии XV100K от Dixell разработаны для однофазных двигателей переменного тока до 500Вт, с входом для NTC-датчика, 4÷20мА, 0÷1В или 0÷10В. Используют для поддержания давления и температуры в холодильных системах, включая вентиляторы испарителя. Данное компактное управляющее устройство, которое изменяет частоту вращения вала в зависимости от потребляемой нагрузки, обеспечивает плавную подачу пускового тока на обмотку. Входы для регулирования по температуре и давлению. Тип корпуса: 4 DIN-модуль (500 Вт).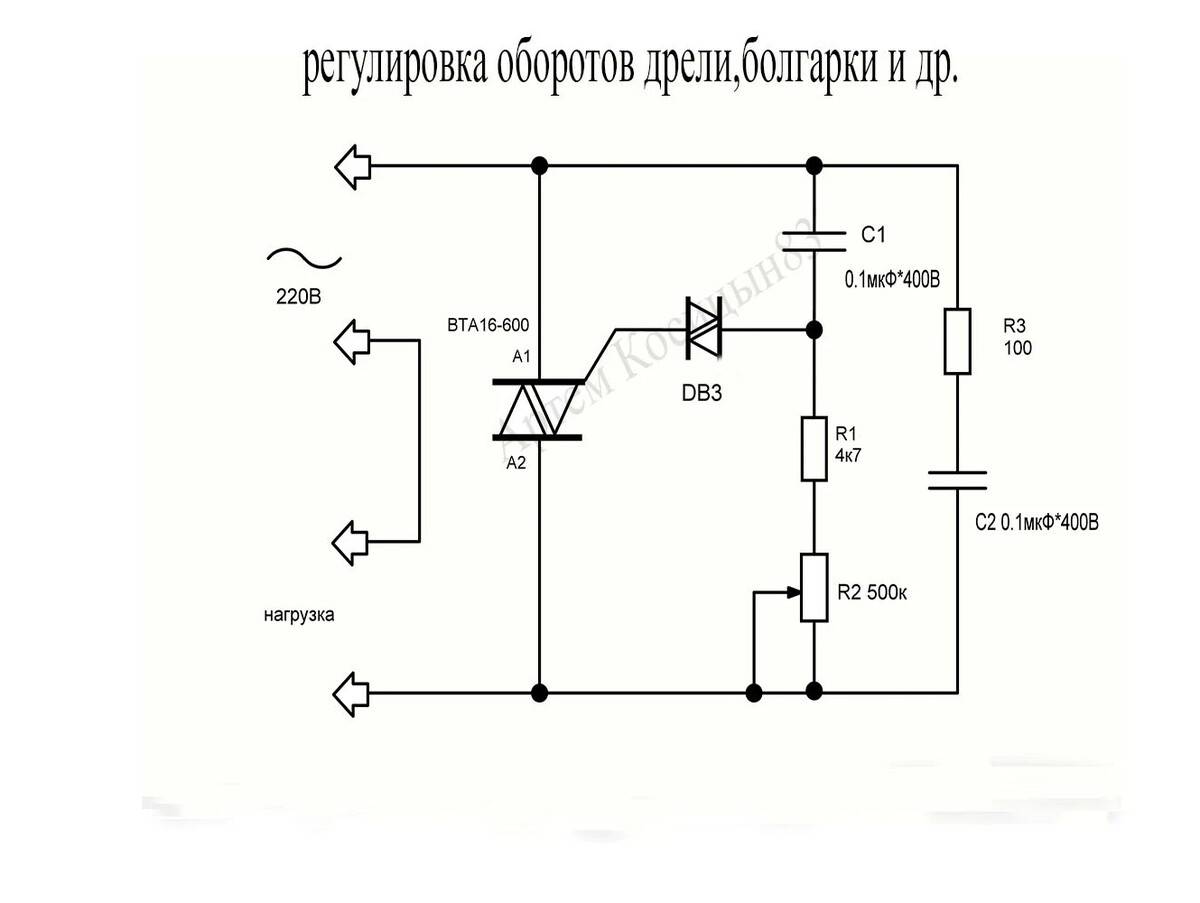 Прямое или обратное действие для вентиляторов конденсатора или испарителя. Функция отключения, функции ограничения по минимальной и максимальной скорости при запуске. Выход триггера для управления другим модулем. Совместимость с контроллерами Dixell серии XM600.
Прямое или обратное действие для вентиляторов конденсатора или испарителя. Функция отключения, функции ограничения по минимальной и максимальной скорости при запуске. Выход триггера для управления другим модулем. Совместимость с контроллерами Dixell серии XM600.
Временно не продается
Контроллер поворотной шайбы— документация Navigation 2 1.0.0 Редактировать
Исходный код на Github.
nav2_rotation_shim_controller проверит приблизительную разницу курса относительно робота и вновь полученного пути. Если в пределах порога, он передаст запрос на primary_controller для выполнения задачи. Если он выходит за пороговое значение, этот контроллер будет вращать робота на месте в направлении этого направления пути. Как только он окажется в пределах допуска, он передаст управление-исполнение с этого контроллера поворотной прокладки на подключаемый модуль основного контроллера. На этом этапе основной плагин робота возьмет на себя управление для плавного перехода к задаче.
На этом этапе основной плагин робота возьмет на себя управление для плавного перехода к задаче.
Контроллер RotationShimController наиболее подходит для:
Роботов, которые могут вращаться на месте, таких как дифференциальные и всенаправленные роботы.
Предпочтение вращаться на месте, когда начинается отслеживание нового пути, направление которого значительно отличается от текущего направления робота, или когда настройка контроллера для его задачи затрудняет крутые повороты.
Использование планировщиков, не реализуемых с кинематической точки зрения, таких как NavFn, Theta* или Smac 2D (планировщики, реализуемые, такие как Smac Hybrid-A* и State Lattice, начнут поиск с фактического начального направления робота, не требуя поворота, поскольку их пути гарантированно управляются физическими ограничениями).
См. пакет README для получения более полной информации.
Параметры контроллера поворотной прокладки
- angular_dist_threshold
Тип
По умолчанию
двойной
0,785
- Описание
Максимальное угловое расстояние, в радианах, от направления пути до начала поворота внутрь.
- forward_sampling_distance
Тип
По умолчанию
двойной
0,5
- Описание
Прямое расстояние в метрах вдоль пути для выбора точки отбора проб, используемой для аппроксимации направления пути
- rotate_to_heading_angular_vel
Тип
По умолчанию
двойной
1,8
- Описание
Угловая скорость вращения, в рад/с, для поворота к курсу пути
- первичный_контроллер
Тип
По умолчанию
строка
Н/Д
- Описание
Плагин внутреннего контроллера, используемый для фактического управления поведением после перехода к заголовку
- max_angular_accel
Тип
По умолчанию
двойной
3.
2- Описание
Максимальное угловое ускорение для поворота на курс (рад/с/с)
- симулировать_вперед_время
Тип
По умолчанию
двойной
1,0
- Описание
Время в секундах для прямой имитации команды поворота для проверки на коллизии. Если обнаружено столкновение, перенаправляет управление обратно на основной плагин контроллера.

 2
2Пример
controller_server:
ros__параметры:
use_sim_time: Истина
частота_контроллера: 20.0
min_x_velocity_threshold: 0,001
min_y_velocity_threshold: 0,5
min_theta_velocity_threshold: 0,001
progress_checker_plugins: ["progress_checker"] # progress_checker_plugin: "progress_checker" Для Humble и старше
target_checker_plugins: ["goal_checker"]
controller_plugins: ["FollowPath"]
progress_checker:
плагин: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0,5
traffic_time_allowance: 10. 0
цель_проверка:
плагин: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0,25
yaw_goal_tolerance: 0,25
с состоянием: правда
Путь следования:
плагин: "nav2_rotation_shim_controller::RotationShimController"
primary_controller: "nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController"
angular_dist_threshold: 0,785
forward_sampling_distance: 0,5
rotate_to_heading_angular_vel: 1,8
max_angular_accel: 3.2
Simulation_ahead_time: 1.0
# Параметры первичного контроллера можно разместить здесь ниже
# ...
 0
цель_проверка:
плагин: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0,25
yaw_goal_tolerance: 0,25
с состоянием: правда
Путь следования:
плагин: "nav2_rotation_shim_controller::RotationShimController"
primary_controller: "nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController"
angular_dist_threshold: 0,785
forward_sampling_distance: 0,5
rotate_to_heading_angular_vel: 1,8
max_angular_accel: 3.2
Simulation_ahead_time: 1.0
# Параметры первичного контроллера можно разместить здесь ниже
# ...
0
цель_проверка:
плагин: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0,25
yaw_goal_tolerance: 0,25
с состоянием: правда
Путь следования:
плагин: "nav2_rotation_shim_controller::RotationShimController"
primary_controller: "nav2_regulated_pure_pursuit_controller::RegulatedPurePursuitController"
angular_dist_threshold: 0,785
forward_sampling_distance: 0,5
rotate_to_heading_angular_vel: 1,8
max_angular_accel: 3.2
Simulation_ahead_time: 1.0
# Параметры первичного контроллера можно разместить здесь ниже
# ...
© Copyright 2020.
smac 1
Привет всем, это ваш дружелюбный навигатор по окрестностям!
С этого момента и до конца года я работаю над добавлением в Nav2 некоторых из давно существующих запросов на функции среднего размера. Первым на повестке дня был контроллер вращения на месте, получивший название 9.0007 RotationShimController для краткости. На высоком уровне этот контроллер будет вращать робота в направлении направления пути при работе с голономными планировщиками, прежде чем передать ответственность за отслеживание пути вашему основному плагину контроллера (например, RPP, DWB, TEB).
Первым на повестке дня был контроллер вращения на месте, получивший название 9.0007 RotationShimController для краткости. На высоком уровне этот контроллер будет вращать робота в направлении направления пути при работе с голономными планировщиками, прежде чем передать ответственность за отслеживание пути вашему основному плагину контроллера (например, RPP, DWB, TEB).
nav2_rotation_shim_controller проверит приблизительную разницу курса относительно робота и вновь полученного пути. Если в пределах порога, он передаст запрос на primary_controller для выполнения задачи. Если он выходит за пороговое значение, этот контроллер будет вращать робота на месте в направлении этого направления пути. Как только он окажется в пределах допуска, он передаст управление-исполнение с этого контроллера поворотной прокладки на подключаемый модуль основного контроллера. На этом этапе основной плагин робота возьмет на себя управление для плавного перехода к задаче.
RotationShimController наиболее подходит для:
- Роботов, которые могут вращаться на месте, таких как дифференциальные и всенаправленные роботы.
- Предпочтение вращаться на месте, когда начинается отслеживание нового пути, направление которого значительно отличается от текущего направления робота, или когда настройка контроллера для его задачи затрудняет узкие повороты.
- Использование планировщиков, не реализуемых с кинематической точки зрения, таких как NavFn, Theta* или Smac 2D (планировщики Feasible, такие как Smac Hybrid-A* и State Lattice, начнут поиск с фактического начального направления робота, не требуя поворота, поскольку их пути гарантированная управляемость физическими ограничениями).
Это было разработано из-за особенностей TEB и DWB, но применимо к любому другому типу подключаемого модуля контроллера, с которым вы хотели бы иметь вращение на месте. Поведение TEB имеет тенденцию подбрасывать робота с небольшими поворотами или когда путь начинается с направления, сильно отличающегося от текущего, несколько неожиданным образом из-за подхода с эластичной лентой.
DWB можно настроить на любой тип поведения, но, как правило, настройка на превосходное отслеживание пути также делает его менее оптимальным для плавного перехода к новым путям в дальних направлениях — всегда есть компромиссы. Предоставление TEB и DWB лучшей отправной точки для начала отслеживания пути значительно упрощает настройку контроллеров и создает более интуитивно понятные результаты для наблюдателей.
https://navigation.ros.org/configuration/packages/configuring-rotation-shim-controller.html
Вы можете найти руководство по настройке выше. Для загрузки я добавил учебник о том, как использовать контроллер поворотной прокладки, который вы можете найти по ссылке ниже. Я думаю, что иллюстративный учебник для этой функции необходим, так как это немного другой способ работы с плагинами (например, плагин внутри плагина).
https://navigation.ros.org/tutorials/docs/using_shim_controller.html
Счастливого вращения,
Стив
15 лайков
Гианстифф