Шаговые двигатели для 3D принтеров
Шаговый двигатель Nema17 1.8° 40 мм
Артикул: Nema17-42J1840-408
Крутящий момент 4 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:0.8 АСопротивление/фаза:7.5 ОмИндуктивность/фаза:10 мГн
В наличии
1 000 ₽
Шаговый двигатель Nema17 1.8° 40 мм
Артикул: Nema17-JK42HS40-1704
Крутящий момент 4 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.7 АСопротивление/фаза:1.65 ОмИндуктивность/фаза:3.2 мГн
В наличии
1 300 ₽
Шаговый двигатель Nema17 1.8° 60 мм
Артикул: Nema17-60mm-6kg
Крутящий момент 6 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.5 АУдерживающий момент:6.0 кг*смДлина корпуса:60 мм
В наличии
2 520 ₽
Шаговый двигатель с двумя валами Nema23 1.8° 50 мм
Артикул: Nema23-50mm-DS-8
С 2 валами, ток 1.0 А, крутящий момент 8.6 кг*см, вал 8 мм
Тип двигателя:гибридныйНоминальное напряжение:6. 0 ВУгловой шаг:1.8°Номинальный ток/фаза:1.0 АСопротивление/фаза:6.0 Ом
0 ВУгловой шаг:1.8°Номинальный ток/фаза:1.0 АСопротивление/фаза:6.0 Ом
В наличии
3 080 ₽
Шаговый двигатель Nema34 1.8° 150 мм
Артикул: Nema34-150mm-130kg
Крутящий момент 130 кг*см
Тип двигателя:гибридныйНоминальное напряжение:7.2 ВУгловой шаг:1.8°Номинальный ток/фаза:4 АСопротивление/фаза:1.0 Ом
В наличии
12 000 ₽
Демпфер для шагового двигателя NEMA 17
Артикул: MM-Anti-Vibro-NEMA17
В наличии
1 050 ₽
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42Al-Flat
Держатель алюминиевый для шагового двигателя 42 серии
В наличии
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42A
Держатель алюминиевый для шагового двигателя 42 серии
В наличии
Держатель для шагового двигателя NEMA 17 под экструдеры BMG/Titan Aero
Артикул: RKP-MB42-BMG
Держатель алюминиевый для шагового двигателя 42 серии
В наличии
Шаговый двигатель Nema14 1.8° 34 мм
Артикул: Nema14-14HY3408
Крутящий момент 1. 83 кг*см
83 кг*см
Тип двигателя:гибридныйНоминальное напряжение:12.0 ВУгловой шаг:1.8°Номинальный ток/фаза:0.8 АСопротивление/фаза:6.5 Ом
Под заказ
Шаговый двигатель Nema14 1.8° 34 мм
Артикул: Nema14-14HY0007-20
Крутящий момент 0.91 кг*см
Тип двигателя:гибридныйНоминальное напряжение:2.3 ВУгловой шаг:1.8°Номинальный ток/фаза:1.25 АСопротивление/фаза:1.86 Ом
Под заказ
1 330 ₽
Шаговый двигатель Nema16 1.8° 38 мм
Артикул: Nema16-FL39ST38-0504A
Крутящий момент 2.9 кг*см
Тип двигателя:гибридныйНоминальное напряжение:12.0 ВУгловой шаг:1.8°Номинальный ток/фаза:0.5 АСопротивление/фаза:24 Ом
Под заказ
Шаговый двигатель Nema17 1.8° 34 мм
Артикул: Nema17-17HS1011-20B
Крутящий момент 3.2 кг*см
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:1.2 АСопротивление/фаза:3.2 ОмУдерживающий момент:3.2 кг*см
Под заказ
1 400 ₽
Шаговый двигатель Nema17 1.8° 40 мм
Артикул: Nema17-17HS4401S
Крутящий момент 4. 2 кг*см
2 кг*см
Тип двигателя:гибридныйНоминальное напряжение:3.6 ВУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:2.4 Ом
Под заказ
1 600 ₽
Шаговый двигатель Nema17 0.9° 48 мм
Артикул: Nema17-17HD48002H-22B
Крутящий момент 4.4 кг*см
Тип двигателя:гибридныйУгловой шаг:0.9°Номинальный ток/фаза:1.68 АСопротивление/фаза:1.65 ОмИндуктивность/фаза:4.1 мГн
Под заказ
1 500 ₽
Шаговый двигатель с двумя валами Nema17 1.8° 40 мм
Артикул: Nema17-40mm-DS
С 2 валами, ток 1.5 А, крутящий момент 4.5 кг*см, вал 5 мм
Тип двигателя:гибридныйНоминальное напряжение:3.3 BУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:2.2 Ом
Под заказ
1 820 ₽
Шаговый двигатель с двумя валами Nema17 1.8° 60 мм
Артикул: Nema17-60mm-DS
С 2 валами, ток 1.5 А, крутящий момент 6 кг*см, вал 5 мм
Тип двигателя:гибридныйНоминальное напряжение:2.7 BУгловой шаг:1.8°Номинальный ток/фаза:1.5 АСопротивление/фаза:1. 8 Ом
8 Ом
Под заказ
2 380 ₽
Шаговый двигатель Nema17 1.8° с винтом T8 295 мм и гайкой
Артикул: Nema17-42HS40-1004YAL
Система линейного перемещения в сборе.
Тип двигателя:гибридныйНоминальное напряжение:3.9 ВУгловой шаг:1.8°Номинальный ток/фаза:1.0 АСопротивление/фаза:3.9 Ом
Под заказ
3 500 ₽
Шаговый двигатель Nema23 1.8° 56 мм
Артикул: Nema23-56mm-12kg-6
Крутящий момент 12 кг*см
Тип двигателя:гибридныйНоминальное напряжение:3.3 BУгловой шаг:1.8°Номинальный ток/фаза:2.5 АСопротивление/фаза:1.6 Ом
Под заказ
3 500 ₽
Шаговый двигатель с двумя валами Nema23 1.8° 76 мм
Артикул: Nema23-76mm-DS-8
С 2 валами, ток 2.5 А, крутящий момент 17.5 кг*см, вал 8 мм
Тип двигателя:гибридныйУгловой шаг:1.8°Номинальный ток/фаза:2.5 АУдерживающий момент:17.5 кг*смДлина корпуса:76 мм
Под заказ
4 100 ₽
Радиатор охлаждения экструдера MK7/MK8, черный
Артикул: HeatSink-40x40x11-B
Радиатор охлаждения шагового двигателя NEMA 17
Под заказ
Радиатор охлаждения шагового двигателя NEMA 17
Артикул: HeatSink-40x40x11. 3-B
3-B
Радиатор охлаждения 40 x 40 x 11.3 мм
Под заказ
Держатель для шагового двигателя NEMA 17
Артикул: RKP-MB42S-A
Держатель стальной для шагового двигателя 42 серии
Под заказ
Держатель для шагового двигателя NEMA 23
Артикул: RKP-MB57S
Держатель стальной для шагового двигателя 57 серии
Под заказ
Компания Техно Принт 3D
Это наш первый обзор на самые популярные и недорогие 3D принтеры за 2020 год. В список войдут самые продаваемые устройства в двух ценовых диапазонах (до 30 т.р. и до 60 т.р.). Будут представлены принтеры работающие как с пластиковым филаментом (FDM), так и с фотополимерами (LCD/DLP). Данный список всегда будет актуальным, так как периодически обновляется и дополн Подробнее→
Китайская компания Dazz3D анонсирует запуск проекта на KickStarter и принимает предварительные заказы на 3D принтеры Dazz3D Basic и Dazz3D Pro. Эти революционно новые устройства ориентированы как на профессиональный рынок так и на любительский. Подробнее→
Подробнее→
Все мы знаем, что точная калибровка рабочего стола 3D принтера – это фундамент и залог успешной печати, на любом FDM-принтере. В этой статье мы расскажем об основных и самых популярных способах выравнивания “кровати”. Итак, как уже было сказано выше, 3D-печать без калибровки рабочего стола – невозможна. С этим процессом мы сталкиваемся посто Подробнее→
Сегодня трудно прожить день, ни разу не услышав о технологии 3D печати, которая с невероятной скоростью врывается в нашу жизнь. Все больше и больше людей во всем мире начинает увлекаться технологией трехмерной печати, поскольку с каждым днем она становится все доступнее и дешевле. Сейчас практически любой человек может позволить себе купить 3D принтер, и при помо Подробнее→
FormLabs Form 2 и Ultimaker 3 – сегодня, пожалуй, самые популярные 3D принтеры, способные осуществлять высококлассную печать, с невероятным качеством детализации поверхности. Причем два этих устройства, используют совершенно разные технологии, и посему, между ними очень много различий. Многие скажут, что сравнивать их неправильно или
Подробнее→
Причем два этих устройства, используют совершенно разные технологии, и посему, между ними очень много различий. Многие скажут, что сравнивать их неправильно или
Подробнее→
Компания XYZprinting, популярная благодаря линейке настольных 3D принтеров daVinci, выводит в профессиональную и промышленную среду пять новых устройств. Один будет использовать технологию лазерного спекания, второй, полноцветной струйной печати и три DLP машины. В первую очередь новинки будут интересны стоматологам и ювелирам. Подробнее→
Чистка сопла 3D принтера – это достаточно частый процесс, с которым приходится сталкиваться любому пользователю такого устройства. Это совершенно не сложная процедура, справиться с которой сможет любой. Выполнить эту задачу можно за 15 минут, использую лишь сподручные инструменты и присобления. Подробнее→
Паровая полировка ацетоном ABS пластика – это процесс сглаживания поверхности моделей, напечатанных на 3D принтере.
Разборка струйного принтера
Разборка струйного принтераВ процессе сборки моего ленточно-шлифовального станка 1″x42″ и выставочный дисплей pantorouter, который я израсходовал большая часть 8-мм валов у меня была. Такие струйные принтеры HP все-в-одном – хороший источник, поэтому я разобрал этот. Я нашел его на обочине год назад, полагая, что я мог бы все еще использовать его, если бы нашел адаптер питания, чтобы пойти с ним.
Каждый раз, когда я разбираю старый принтер, я всегда поражаюсь его механической изобретательности. внутри, так что я решил, что стоит написать об этом.
Часть сканера находится сверху принтера. Разбивая его,
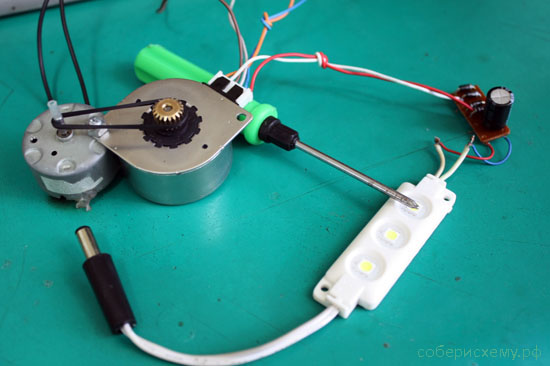
Я держу целых кишок сканера. это разноцветный
Светодиодная лента, сенсорная лента и небольшой двигатель постоянного тока с зубчатой передачей для привода.
его вдоль зубчатого колеса в нижней части корпуса сканера. Сканеры раньше
куда более сложные дела, с шаговыми двигателями, причудливой оптикой с зеркалами,
и полированные валы для скольжения.
Неудивительно, что сканеры стали такими дешевыми.
В прошлый раз, когда я хотел купить принтер, я купил принтер/сканер, потому что это было
самый дешевый вариант!
Разбивая его,
Я держу целых кишок сканера. это разноцветный
Светодиодная лента, сенсорная лента и небольшой двигатель постоянного тока с зубчатой передачей для привода.
его вдоль зубчатого колеса в нижней части корпуса сканера. Сканеры раньше
куда более сложные дела, с шаговыми двигателями, причудливой оптикой с зеркалами,
и полированные валы для скольжения.
Неудивительно, что сканеры стали такими дешевыми.
В прошлый раз, когда я хотел купить принтер, я купил принтер/сканер, потому что это было
самый дешевый вариант!
Кнопки в верхней части не имеют явных пружин, только кусочки пластика, которые гнутся, когда их толкают.
Пластиковый корпус образует ванну вокруг механизма принтера.
Электроника — это всего лишь маленькая плата в углу.
Никаких видимых силовых транзисторов или силовых ИС. Я думаю, что маленькие двигатели постоянного тока
использование этого принтера более эффективно, чем используемые принтеры с шаговыми двигателями
в использовании, поэтому меньше необходимости в силовой электронике.
Я отрезал пластиковую ванну ленточной пилой, чтобы было легче смотреть у механизма.
Здесь вы можете видеть полированный 8-миллиметровый вал, по которому скользит печатающая головка, ремень ГРМ, приводящий его в движение (мой палец давит на него), и прозрачная пластиковая лента с очень тонкими черными полосами для определения местоположения ощущение.
Крупный план пластиковой полоски с тонкими черными полосами, примерно шесть на миллиметр. Полоса туго натягивается по ходу печатающей головки. оптический датчик на печатающей головке считывает полосу. Используя квадратурное кодирование, принтер точно знает, как далеко и в каком направлении печатающая головка сдвинулась.
Это позволяет принтеру устанавливать положение печатающей головки очень точно. высокая повторяемость, точнее, чем при использовании шагового двигателя и синхронизации пояс. Это необходимо для двунаправленной передачи с высоким разрешением. печать.
Двигатель, приводящий в движение печатающую головку, очень маленький. Двигатель постоянного тока. Двигатели постоянного тока быстрее и эффективнее,
но позиционная обратная связь необходима для достижения точного управления. Но
обратная связь по положению уже необходима для печатающей головки, поэтому может
также используйте его для управления двигателем постоянного тока.
Двигатель постоянного тока. Двигатели постоянного тока быстрее и эффективнее,
но позиционная обратная связь необходима для достижения точного управления. Но
обратная связь по положению уже необходима для печатающей головки, поэтому может
также используйте его для управления двигателем постоянного тока.
Извлечен полированный стальной стержень диаметром 8 мм. Печатающая головка скользит по этому стержень. Это основное “вкусно”, за которым я охотился.
На правом конце принтера находится плевательница. Принтер перемещает печатающую головку с этой стороны и запускает форсунки на полную мощность. власть очистить их. Войлочные подушечки внизу собирают чернила.
Также имеется швабра, которая может перемещаться по печатающим головкам. чтобы помочь очистить их.
С левой стороны принтера находятся две резиновые прокладки, которые поднимаются, когда
печатающая головка упирается в штифт. Эти прокладки закрывают принтер
картриджи, когда печатающая головка припаркована, чтобы предотвратить их высыхание
вне.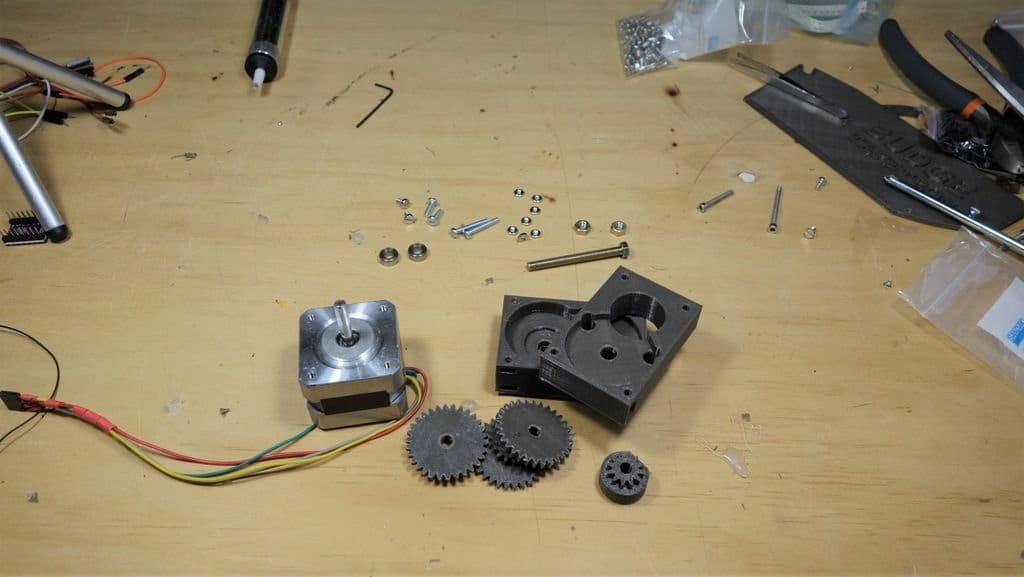
Слева мотор и редуктор механизма подачи бумаги.
Крайняя левая белая шестеренка на фото имеет прозрачный диск с очень прекрасный набор линий вокруг него. Оптический энкодер (на коричневой цепи плата внизу) определяет точное движение подачи бумаги, подобно тому, как определяется положение печатающей головки.
Двигатель подачи бумаги также представляет собой небольшой двигатель постоянного тока.
Я ломал голову над тем, что активирует механизм скребка справа. Я обнаружил
как это работало после того, как я сломал его. Есть небольшая шестеренка (A), которая активирует скребок,
и это подтянуто куском пластика (B), который я сломал. Этот пластик был
часть узла на конце подающего ролика. Когда печатающая головка перемещается полностью
вправо, он поворачивает этот механизм, что заставляет часть B поднимать шестерню A.
чтобы зацепить его с шестерней на ролике подачи. Таким образом, двигатель подачи бумаги приводится в действие
швабры. Это означает, что ракель можно использовать только между листами бумаги.
В механизме подачи бумаги много шестерен, и они, я думаю, включаются при двигатель подачи бумаги назад.
Вот кусочки, которые я сохранил. Основная подача бумаги тоже на валу 8 мм (бонус), в то время как другие ролики на валах 6 мм. Я израсходовал большую часть своего 6-миллиметрового вала, когда У меня появилось много подписчиков для моего пантороутера, так что было приятно пополнить и этот запас.
А вот барахло, которое я не сохранил. Немного расточительно, но весь принтер пришел из мусор, так что моя утилизация по-прежнему была чистым сокращением мусора.
Деревянный корпус компьютера
Антенна Wi-Fi
Бустерная тарелка
Ремонт пластиковых деталей
Управляемый компьютером шаблон
для коробчатого соединения
Обзор самого дешевого USB-прицела, который я смог найти в Интернете (только видео)
Малиновый Пи
подставка для компьютера
Ошибка ремонта ленточной пилы
Смазка шумного шопвака
Двигатель посудомоечной машины с мокрым ротором
Другие технические материалы
Уборка дров с бордюра, замедленная съемка
На мой сайт по деревообработке.
Преодоление проблем проектирования шаговых двигателей в 3D-принтерах
Дипанкар Митра, системный инженер, Texas Instruments
3D-печать — быстро развивающийся рынок со значительным потенциалом роста. 3D-принтеры создают трехмерные объекты сложной формы и геометрии путем последовательного нанесения материалов непосредственно из модели автоматизированного проектирования. Сельское хозяйство, здравоохранение, автомобилестроение, локомотивостроение и авиастроение являются одними из первых, кто применил 3D-печать для проектирования прототипов и производства. С более широким внедрением в этих отраслях растет спрос на небольшие, точные, энергоэффективные и бесшумные 3D-принтеры.
Все 3D-принтеры используют несколько шаговых двигателей для получения качественной печати. Эти шаговые двигатели перемещают платформу принтера по осям X-Y-Z, перемещают экструдер или изменяют цвет вывода на принтер. Использование высокопроизводительных драйверов шаговых двигателей может помочь двигателям принтеров работать бесшумно, точно и эффективно.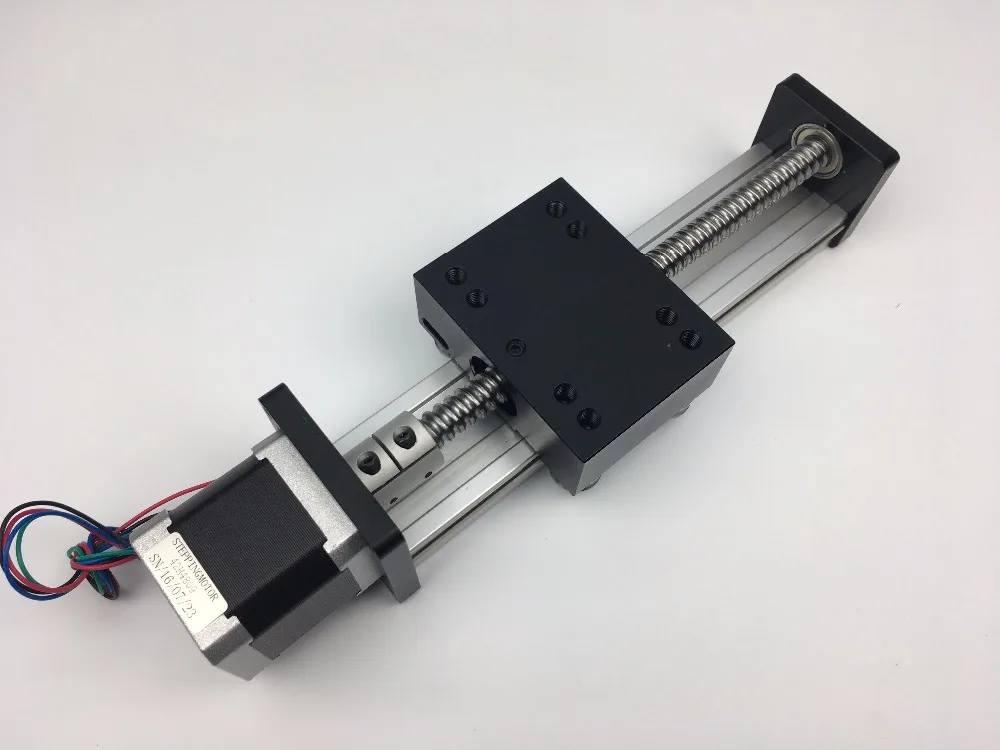 В этой статье я расскажу, как найти правильные драйверы шагового двигателя для создания 3D-принтера с нуля или обновления существующего.
В этой статье я расскажу, как найти правильные драйверы шагового двигателя для создания 3D-принтера с нуля или обновления существующего.
Требования к драйверу шагового двигателя 3D-принтера на системном уровне и показатели производительности
Шаговый двигатель движется дискретными шагами во время вращения, определяемыми углом шага. Он имеет две обмотки электрического тока, каждая из которых управляется с помощью Н-моста. Как показано на рис. 1, драйвер шагового двигателя подает токовые сигналы, приближающиеся к синусоиде (синий цвет) на одну катушку и косинусоиде (красный цвет) на другую. Один (90-градусный) квадрант формы волны тока соответствует повороту шагового двигателя на один угол шага – 1,8 градуса для большинства современных гибридных шаговых двигателей.
Рис. 1. Кривая тока катушки шагового двигателя В зависимости от сложности и доступных функций один 3D-принтер может содержать от четырех до десяти шаговых двигателей. На рис. 2 показана упрощенная блок-схема 3D-принтера.
Давайте рассмотрим основные системные требования драйверов шаговых двигателей, используемых в 3D-принтерах.
Напряжение питания Н-моста
Автономная мощность переменного тока преобразуется преобразователями переменного тока в постоянный ток более низкого напряжения для работы Н-моста шагового привода. Наиболее распространенные напряжения питания постоянного тока, используемые сегодня, составляют 12 В или 24 В. При той же выходной мощности работа при 24 В вдвое меньше среднего тока по сравнению с работой при 12 В.
Некоторые производители разрабатывают свои 3D-принтеры для работы при еще более высоких номинальных напряжениях питания, таких как 36 В или 48 В. Более высокое напряжение питания при более низком среднем токе приводит к меньшим потерям при передаче и меньшему весу кабелей. Более высокое напряжение также приводит к более высокому крутящему моменту на высоких скоростях, что приводит к более высокой скорости печати.
Номинальное напряжение питания 36 В означает, что драйвер шагового двигателя должен выдерживать напряжение не менее 45 В при максимальном допуске 25 % на шине питания. Для номинального напряжения питания 24 В должно быть достаточно драйвера шагового двигателя с абсолютным максимальным номинальным напряжением 30 В.
Несоответствие между номинальным напряжением, указанным в техническом описании шагового двигателя, и напряжением питания драйвера шагового двигателя может сбивать с толку. Вы должны помнить, что номинальное напряжение двигателя — это просто произведение его номинального тока и сопротивления обмотки. Напряжение питания шагового драйвера может безопасно превышать номинальное напряжение двигателя.
Номинальный ток шагового драйвера
В большинстве 3D-принтеров используются шаговые двигатели размера 17 Национальной ассоциации производителей электрооборудования (NEMA) с номинальным крутящим моментом от 0,3 Н·м до 0,5 Н·м. В зависимости от применения номинальный ток шагового двигателя может составлять от нескольких сотен миллиампер до 2 А, а в редких случаях и выше. Шаговые двигатели, используемые для перемещения XYZ платформы принтера или движения экструдера, как правило, рассчитаны на более высокие токи по сравнению с шаговыми двигателями, используемыми для выбора цвета.
Шаговые двигатели, используемые для перемещения XYZ платформы принтера или движения экструдера, как правило, рассчитаны на более высокие токи по сравнению с шаговыми двигателями, используемыми для выбора цвета.
Ограничение по току драйвера шагового двигателя должно быть выше максимального тока, потребляемого шаговым двигателем, с приемлемым коэффициентом запаса. В некоторых системах используется один и тот же драйвер двигателя для управления шаговыми двигателями как с высоким, так и с низким током. Оптимальным решением было бы использование совместимых по выводам драйверов шаговых двигателей, рассчитанных на низкие и высокие токи, для управления различными шаговыми двигателями, используемыми в системе 3D-принтера.
Температура окружающей среды и сопротивление во включенном состоянии
Большинство 3D-принтеров требуют, чтобы температура поверхности печатной платы не превышала 80°C; поэтому драйверы шаговых двигателей должны иметь хорошие тепловые характеристики.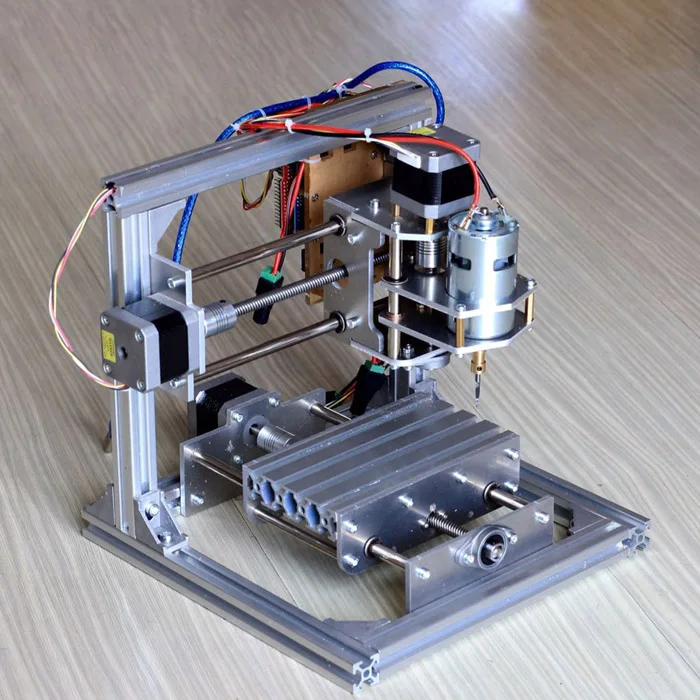 Чтобы поддерживать температуру полупроводникового кристалла в допустимых пределах, драйверы шаговых двигателей с высоким сопротивлением в открытом состоянии (> 500 мОм как для стороны высокого, так и для низкого напряжения вместе) должны использовать большой радиатор, что увеличивает стоимость системы. Некоторые 3D-принтеры даже используют драйверы затвора с многочисленными внешними компонентами для более низких рабочих температур. Для двигателей, рассчитанных на 2 А, сопротивление во включенном состоянии, близкое к 350 мОм, в большинстве случаев позволяет вообще обойтись без радиатора.
Чтобы поддерживать температуру полупроводникового кристалла в допустимых пределах, драйверы шаговых двигателей с высоким сопротивлением в открытом состоянии (> 500 мОм как для стороны высокого, так и для низкого напряжения вместе) должны использовать большой радиатор, что увеличивает стоимость системы. Некоторые 3D-принтеры даже используют драйверы затвора с многочисленными внешними компонентами для более низких рабочих температур. Для двигателей, рассчитанных на 2 А, сопротивление во включенном состоянии, близкое к 350 мОм, в большинстве случаев позволяет вообще обойтись без радиатора.
Микрошаг, точность положения и плавность движения
В 3D-принтере качество печати зависит от точности положения шаговых двигателей, управляющих движением экструдера и платформы принтера в направлениях X-Y-Z. Работа шагового двигателя в полношаговом режиме приводит к скачку двигателя на один угол шага (в большинстве случаев на 1,8 градуса механического вращения), что приводит к перерегулированию, пульсациям крутящего момента и вибрациям. В результате большинство драйверов шаговых двигателей сегодня включают микрошаговый режим, который разбивает полный шаг на более мелкие равные сегменты и, следовательно, помогает уменьшить вибрации, плавно перемещая двигатель в его предполагаемое положение.
В результате большинство драйверов шаговых двигателей сегодня включают микрошаговый режим, который разбивает полный шаг на более мелкие равные сегменты и, следовательно, помогает уменьшить вибрации, плавно перемещая двигатель в его предполагаемое положение.
Микрошаг 1/16 уровня обычно считается стандартом в большинстве устаревших систем 3D-принтеров. Некоторые из новейших драйверов содержат микрошаги с шагом 1/32, 1/64, 1/128 и 1/256 для максимальной точности позиционирования и плавности движения. Однако большее число микрошагов приведет к лучшей точности позиционирования только в том случае, если крутящий момент на микрошаг больше, чем крутящий момент, необходимый для перемещения нагрузки.
Согласование тока между каналами драйвера шагового двигателя влияет на общую точность позиционирования. Если ток одной катушки представляет собой чистую синусоидальную волну, а ток другой катушки представляет собой чистую косинусоидальную волну, это гарантирует, что выходной ток будет постоянным, а угол приращения одинаковым на каждом микрошаге. Любое отклонение от идеальных значений вызовет неравномерность приращений углового положения и приведет к неравномерному выходному крутящему моменту, неточностям положения и увеличению вибраций двигателя.
Любое отклонение от идеальных значений вызовет неравномерность приращений углового положения и приведет к неравномерному выходному крутящему моменту, неточностям положения и увеличению вибраций двигателя.
Выбор режима затухания драйвера также играет большую роль в определении точности системы. Любая пульсация текущей формы сигнала является отклонением от желаемой формы и проявляется в виде вибрации и плохой точности. Если возможно, работа шагового двигателя в режиме медленного затухания вместо быстрого или смешанного затухания уменьшит пульсации. Однако из-за противоэлектродвижущей силы формы сигналов тока с медленным затуханием искажаются при высоких рабочих скоростях. Таким образом, режим медленного затухания, который может адаптироваться к высоким скоростям, является лучшим способом повышения точности. Плавная работа шагового двигателя должна привести к монотонному графику точности положения, показанному на рисунке 3а, а не к внезапному изменению угла шага, показанному на рисунке 3b.
Слышимый шум
3D-принтеры, особенно старые модели, могут быть настолько громкими, что трудно находиться в одной комнате во время работы принтера. Шум в основном исходит от вентиляторов, шаговых двигателей и других движущихся механических частей, поэтому могут потребоваться дорогостоящие методы шумоподавления, такие как резиновые изоляторы, которые не устраняют шум полностью. Драйверы шагового двигателя более высокого качества могут помочь значительно снизить шум двигателя, что сводит к минимуму уровень шума, создаваемого принтером.
Режим медленного затухания обеспечивает наименьший уровень шума двигателя за счет сведения к минимуму пульсаций тока. Шаговые режимы с низким разрешением, такие как полный или половинный шаг, вызывают перерегулирование ротора и колебания вокруг следующего положения, что приводит к механическим вибрациям и шуму. Микрошаговый режим резко снижает перерегулирование и недорегулирование, что приводит к гораздо более тихой работе. Кроме того, использование эффективной частоты шага за пределами слышимого диапазона частот (примерно 20 кГц) значительно снижает шум, исходящий от шаговых двигателей.
Кроме того, использование эффективной частоты шага за пределами слышимого диапазона частот (примерно 20 кГц) значительно снижает шум, исходящий от шаговых двигателей.
Обнаружение остановки
Большинство 3D-принтеров включают в себя компонент, называемый концевым упором. Определяя положение двигателя, концевые упоры гарантируют, что печатающая головка остановится, когда она достигнет конечной точки движения в заданном направлении. Большинство торцевых упоров либо механические, либо оптические. К сожалению, оптические концевики имеют низкую точность и сложны в настройке, а механические торцевые упоры могут преждевременно изнашиваться и требуют периодического обслуживания. Эти внешние компоненты, предназначенные для контроля положения двигателя, увеличивают общую стоимость системы. Кроме того, некоторые системы сильно перегружают двигатель за пределами желаемой конечной точки, чтобы обеспечить достижение конечной точки, что снижает эффективность системы и вызывает слышимый шум и механические неисправности.
Бессенсорный метод обнаружения останова, встроенный в драйвер шагового двигателя, может заменить концевые упоры и решить эти проблемы. Схема обнаружения опрокидывания должна надежно определять конечную точку двигателя при изменении напряжения питания, температуры, скорости двигателя и параметров двигателя. Встроенное бессенсорное обнаружение опрокидывания также обеспечивает немедленную реакцию при возникновении опрокидывания по сравнению с решениями с датчиками положения, для которых требуется механизм тайм-аута.
Компания Texas Instruments предлагает семейство драйверов шаговых двигателей, специально разработанных для 3D-принтеров нового поколения. Интеллектуальный режим затухания пульсаций в этих драйверах работает с медленным затуханием, но также адаптируется к высокоскоростной работе, обеспечивая бесшумные и точные 3D-принтеры. Драйверы имеют микрошаговый уровень до 1/256, что обеспечивает превосходную регулировку тока. Согласование тока между каналами ±2,5% также помогает достичь высокой точности позиционирования.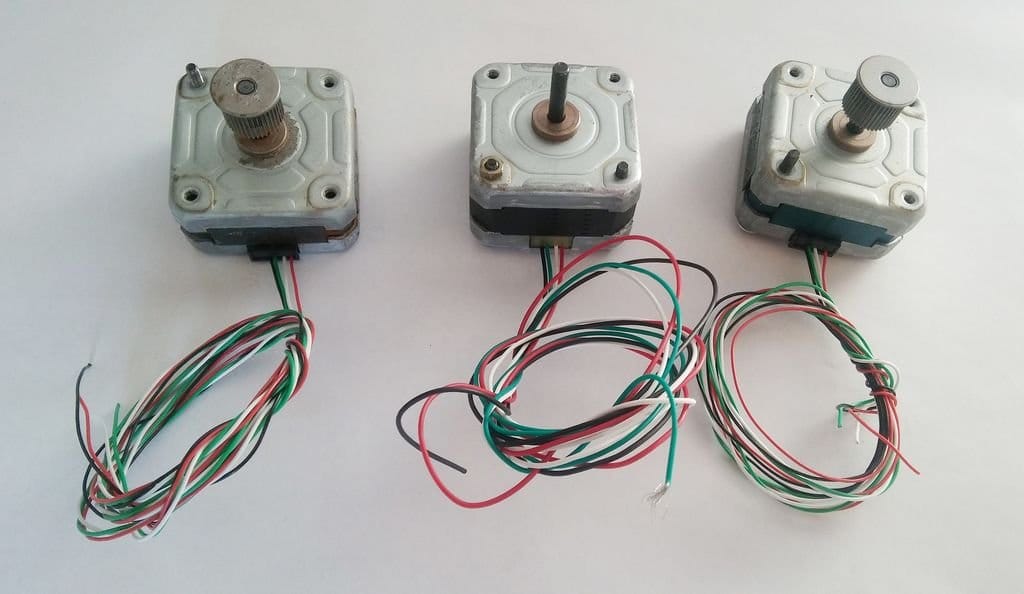
В частности, DRV8424 и DRV8434 обеспечивают сопротивление во включенном состоянии 330 мОм (рассчитано на 2,5 А), а DRV8426 предлагает сопротивление 900 мОм (рассчитано на 1,5 А). Все три устройства совместимы по выводам, что добавляет гибкости при выборе драйвера шагового двигателя.
DRV8434S (с последовательным периферийным интерфейсом) и DRV8434A (с аналоговым интерфейсом ввода/вывода общего назначения) имеют функцию обнаружения опрокидывания без датчика, что устраняет необходимость в концевых упорах. Сопротивление 330 мОм во включенном состоянии также подходит для конструкций без радиаторов.
Семейство устройств доступно как в термоусадочном корпусе с малым контуром (HTSSOP), так и в компактном квадроплоском безвыводном корпусе размером 4 мм на 4 мм (QFN). производительность.
Использование драйверов шаговых двигателей с правильным набором функций может значительно снизить звуковой шум, повысить точность движения и повысить энергоэффективность 3D-принтеров. Драйверы шаговых двигателей, такие как DRV8424, DRV8426, DRV8434S и DRV8434A, обеспечивают разработчикам 3D-принтеров почти бесшумную работу.
Драйверы шаговых двигателей, такие как DRV8424, DRV8426, DRV8434S и DRV8434A, обеспечивают разработчикам 3D-принтеров почти бесшумную работу.
Дополнительные ресурсы
- Нагарадж, Судхир. 2014. «Умная настройка шаговых двигателей стала проще». Технический документ Texas Instruments, литература № SLYY066C, декабрь 2014 г.
- Локридж, Джеймс. 2018. «Умная настройка для эффективного вождения шагового двигателя». Примечание по применению Texas Instruments, литература № SLVAE58, ноябрь 2018 г.
- Митра, Дипанкар. «Бессенсорное обнаружение останова с помощью DRV8889-Q1». Отчет о применении Texas Instruments, литература № SLVAEI3, январь 2020 г.
- Икер, Мэдисон и Дипанкар Митра. «Как уменьшить слышимый шум в шаговых двигателях». Отчет о применении Texas Instruments, литература № SLVAES8, май 2020 г.
- Митра, Дипанкар. «Как улучшить плавность движения и точность шаговых двигателей». Отчет о применении Texas Instruments, литература № SLOA293, сентябрь 2020 г.