Леса строительные Подмости каменщика инвентарно-шарнирные С металлической рамой и настилом — СПЕЦТЕХНИКА-ИНФО
- Главная
- Заявки на аренду
- Продажа спецтехники
- Продажа запчастей
- Ремонт спецтехники
- Контакты и услуги
- Автобусы
- Автобетоносмесители
- Автовышки
- Автогрейдеры
- Ассенизаторы
- Асфальтоукладчики
- Бары
- Бензовозы
- Бензоинструменты
- Бетононасосы
- Битумовозы
- Бульдозеры
- Бытовки
- Вагончики строительные
- Вахтовки
- Вездеходы и внедорожники
- Виброплиты
- Генераторы
- Гидромолоты
- ГНБ бурение
- Грузовики
- Гудронаторы
- Зерновозы
- Илососы
- Каналопромывочные машины
- Катки дорожные
- Компрессоры
- Контейнеровозы
- Краны автомобильные
- Краны башенные
- Краны гусеничные
- Леса строительные
- Лесовозы
- Люльки строительные
- Манипуляторы
- Металловозы
- Мини-погрузчики
- Мульчеры, лесные фрезы и измельчители
- Нефтевозы
- Опалубка
- Осветительные мачты
- Парогенераторные установки
- Погрузчики вилочные
- Погрузчики телескопические
- Погрузчики фронтальные
- Подъёмники самоходные
- Подъёмники фасадные
- Поливомоечные машины
- Полуприцепы
- Ресайклеры
- Самосвалы
- Сваебои
- Сварочное оборудование
- Тепловые пушки
- Топливозаправщики
- Трактора
- Тралы
- Трубовозы
- Трубоукладчики
- Тягачи
- Фрезы дорожные
- Фуры
- Цементовозы
- Штукатурные станции
- Щётки дорожные
- Штабелёры
- Эвакуаторы
- Экскаваторы-погрузчики
- Экскаваторы строительные
- Экскаваторы специальные
- Ямобуры
- Техника и оборудование
- Асфальтирование
- Благоустройство территории
- Бурение скважин на воду
- Вывоз отходов
- Вывоз строительного мусора
- Грузоперевозки
- Грузовые стоянки техники
- Грунт сдам (предложение)
- Грунт приму (спрос)
- ГНБ прокол
- Земляные работы
- Демонтаж
- Доставка бетона и раствора
- Доставка дров, угля, брикетов
- Доставка грузов
- Доставка стройматериалов
- Доставка сыпучих материалов
- Доставка навоза, перегноя, чернозёма
- Мойки техники и грузовиков
- Негабаритные перевозки
- Опасные перевозки
- Обрезка деревьев
- Откачка канализации и септиков
- Очистка канализации
- Пассажирские перевозки
- Услуги грузчиков
- Услуги разнорабочих
- Ремонт дорог
- Строительство дорог
- Уборка и вывоз мусора
- Уборка и вывоз снега
- Удаление пней
- Специальные услуги прочие
- Другое
Тюменская область
Шарнирные алюминиевые строительные леса 4M
Код: 9501254786
17988 грн
Цена указана с доставкой в Украину
Товар есть в наличии
- Описание
Просматривая «Шарнирные алюминиевые строительные леса 4M» данный товар из каталога «Леса» вы можете быть уверены, что после оформления заказа, доставки в Украину, вы получите именно то, что заказывали, в оговоренные сроки и европейского качества.
КРУПНЕЙШИЙ ДИСТРИБЬЮТОР БЕЗОПАСНЫХ ЛЕСТНИЦ, ЛЕСТ И СТЕЛЛАЖЕЙ ДЛЯ ВАШЕГО ДОМА! МЫ РАБОТАЕМ НА ПОЛЬСКОМ РЫНКЕ МНОГО ЛЕТ!
- Леса имеют декларацию о соответствии европейскому стандарту EN 131
- Максимальная нагрузка на леса: 150 кг
- Модель: 4×5 (4 сегмента лестницы по 5 перекладин)
- Идеально подойдет в качестве облегчения в повседневном работы профессионалов, но также может широко использоваться в различных бытовых задачах. Прочная и прочная конструкция позволит использовать его долгие годы. Отличное соотношение цены и качества.
Рабочая высота строительных лесов: 4 [м]
Высота платформы: 2 [м]
Высота всех лесов: 3 [м]
Длина лесов: 1,5 [м]
Ширина лесов: 0,50 [м ]
Размеры платформы: 1,3 x 0,6 [м]
Размеры лесов после сборки: 50 x 32 x 165 [см ]
3W1: ЛЕСА, ДОСТУПНАЯ ЛЕСТНИЦА, ОТДЕЛЬНАЯ ЛЕСТНИЦА!
Мобильные леса – многофункциональные с широким спектром применения. Отдельные элементы подмостей могут использоваться как:
Отдельные элементы подмостей могут использоваться как:
- отдельностоящая лестница – двухсекционная
- опирающаяся лестница li>
- рабочая площадка
Леса изготовлены из высококачественного алюминия со значительной устойчивостью к неблагоприятным погодным условиям.
- Два стабилизатора размером 1,1 [м]
- Оборудованы нескользящими ножками с канавками, гарантирующими
- В комплект входят прочные пластиковые колеса.
- Легко транспортировать леса благодаря установленным колесам.
- Ребристые перекладины 28×28 [мм] прижаты к профилю
- Толстая рабочая платформа с противоскользящим покрытием
- Размеры платформы: 1,3 x 0,6 [м]
- Платформа имеет люкдля эффективного и безопасного перемещения по лесам
Товар Шарнирные алюминиевые строительные леса 4M добавлен в корзину!
Достуное количество товара 9926 шт.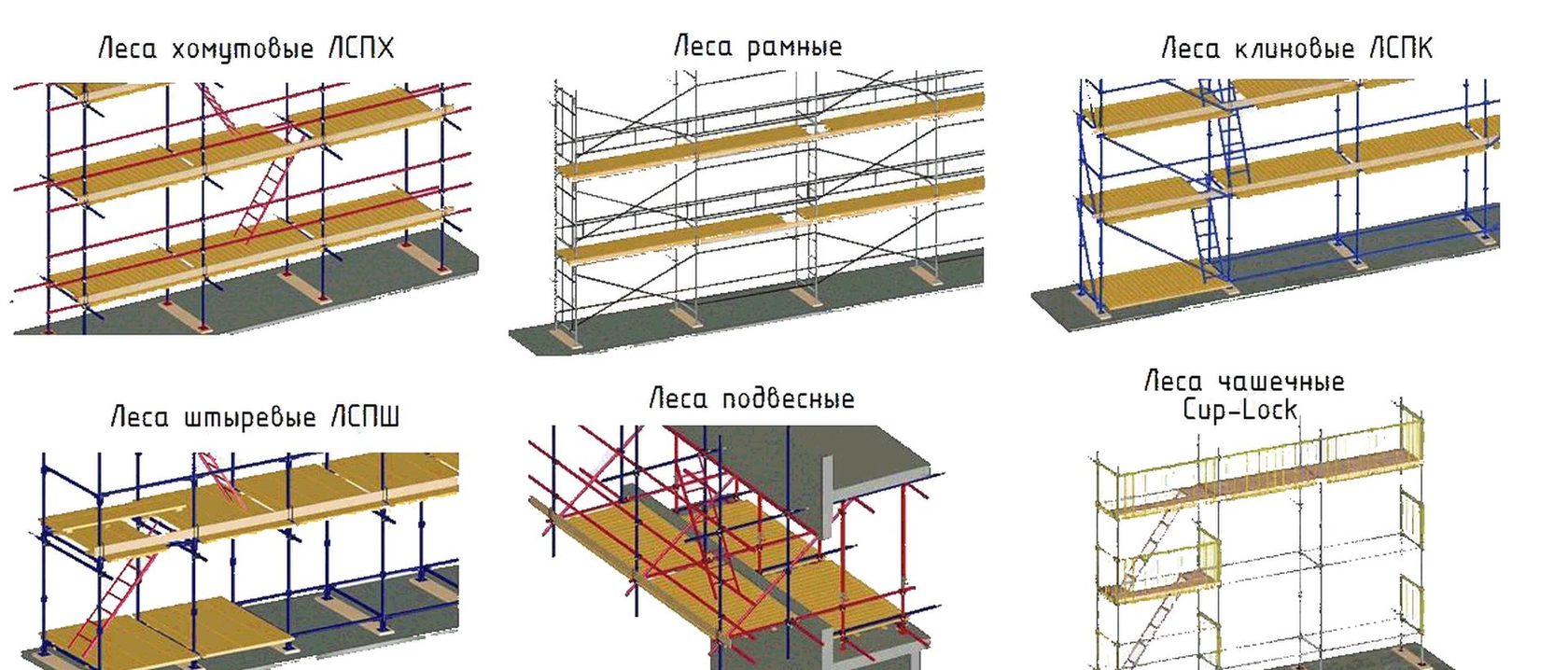
Укажите Ваш телефон, имя и фамилию и наш менеджер свяжется с Вами в ближайшее время.
Номер телефона
Фамилия, Имя, Отчество
Шарнирные лестницы — Американский институт лестниц
Шарнирная лестница — это переносная лестница с одной или несколькими парами запирающие петли, которые позволяют устанавливать лестницу в нескольких конфигурации, такие как одинарная или выдвижная лестница, с или без вынос, стремянка, козловая лестница, подмости или рабочий стол. Каждый пара шарнирных соединений в лестнице может быть зафиксирована в одном или нескольких положениях для размещения различных конфигурации. Фиксирующие положения петель позволяют устанавливать правильные углы для размещения каждой конфигурации, которую производитель обозначил.
На каждой шарнирной лестнице имеется этикетка с инструкциями, иллюстрирующая
фиксирующие петли в заблокированном и незапертом положениях. Каждый
Производитель шарнирных лестниц имеет уникальную конструкцию замкового шарнира и
на каждом замке должно быть ясно указано, заперт он или нет.
Петли шарнирной лестницы требуют периодической смазки. петли должны быть смазаны при получении лестницы, а затем ежегодно или чаще, в зависимости от использования. Когда вовлечен в грязный во время работы накройте открытыми шарнирными механизмами покрытие, чтобы избежать попадание в них загрязнений, которые могут привести к неисправности.
Другая этикетка на изделии иллюстрирует все допустимые конфигурации для данной шарнирной лестницы. Конфигурации не изображенные на этикетке, не должны использоваться.
Размер шарнирной лестницы определяется при ее установке в
конфигурация стремянки путем измерения вдоль передней боковой направляющей от
дно к центру шарнира в верхней части лестницы. Когда
установлены в конфигурации стремянки, ассортимент шарнирных лестниц в
размер от 3 до 15 футов максимум.
Все четыре ножки шарнирной лестницы покрыты нескользящий материал, который должен присутствовать и находиться в хорошем состоянии перед использованием лестницы.
Лестницу нельзя использовать на льду, снегу или скользких поверхностях, если не используются подходящие средства для предотвращения скольжения.
Никогда не ставьте лестницу на другие предметы, такие как ящики, бочки, леса или другие неустойчивые основания, чтобы получить дополнительная высота.
Шарнирные лестницы нельзя связывать или скреплять вместе с любыми другими типами лестниц для обеспечения большей длины.
Надлежащий уход
 Рабочие части, болты, заклепки, ступенчатая рейка
соединения и состояние противоскользящих ножек (защитная обувь)
должны быть проверены.
Рабочие части, болты, заклепки, ступенчатая рейка
соединения и состояние противоскользящих ножек (защитная обувь)
должны быть проверены.Лестницы, подвергающиеся чрезмерному нагреву, как в случае пожара, могут иметь пониженная прочность. Точно так же лестницы, подверженные воздействию агрессивных веществ такие как кислоты или щелочные материалы, могут подвергаться химической коррозии и в результате снижение прочности. Вывести эти лестницы из эксплуатации.
Сломанные или погнутые лестницы и лестницы с отсутствующими или изношенными частями должны быть выведены из эксплуатации и помечены, например, «Опасно – делать Не использовать», пока не будет отремонтирован компетентным механиком или уничтожен. Нет попытки Производится ремонт лестницы с неисправным боковым ограждением. Лестницы с погнутыми или сломанными боковыми поручнями подлежат уничтожению.
Если лестница выбрасывается, она должна быть уничтожена таким
таким образом, чтобы сделать его бесполезным. Другому лицу нельзя давать
возможность использовать лестницу, которая была сочтена небезопасной.
Другому лицу нельзя давать
возможность использовать лестницу, которая была сочтена небезопасной.
При перевозке лестниц на транспортных средствах, оборудованных стойками для лестниц, лестницы должны быть правильно закреплены. Выступ лестницы за пределы точки опоры стойки должны быть сведены к минимуму. Точки поддержки должны быть изготовлены из таких материалов, как дерево или обрезиненная труба, чтобы свести к минимуму последствия вибрации, натирания и дорожных ударов. Обеспечение лестница к каждой опорной точке значительно уменьшит разрушительные эффекты дорожного шока.
Стеллажи для хранения неиспользуемых лестниц должны иметь достаточно опорные точки, чтобы избежать провисания, что может привести к деформации лестница. Другие материалы нельзя класть на лестницу, пока она находится в хранилище.
Стандарты безопасности шарнирных лестниц
Требования безопасности при изготовлении, эксплуатации, использовании и уходе за шарнирными лестницами можно найти в следующих стандартах:
- ANSI A14.
 2 (переносные металлические лестницы)
2 (переносные металлические лестницы) - ANSI A14.5 (переносные лестницы из армированного пластика)
 2 (переносные металлические лестницы)
2 (переносные металлические лестницы)Аннотация Эшафолды для манипулирования сочлененными объектами
Atkeson, C.G., Babu, B.P., Banerjee, N., Berenson, D., Bove, C.P., Cui, X., Dedonato, M., Du, R. , Фенг С., Франклин П., Геннерт М., Графф Дж. П., Хе П., Джагер А., Ким Дж., Кнодлер К., Ли Л., Лю К., Лонг, X., Падир, Т., Полидо, Ф., Тайге, Г.Г., и Синджилефу, X. (2015). Никаких падений, никаких сбросов: надежное гуманоидное поведение в испытании робототехники DARPA. В международная конференция IEEE-RAS по гуманоидным роботам (Том, 2015-декабрь, стр. 623–630). https://doi.org/10.1109/HUMANOIDS.2015.7363436.
Азад П., Асфур Т. и Диллманн Р. (2007). Локализация 6D-объектов на основе стереозвука для захвата гуманоидными робототехническими системами. На международной конференции IEEE/RSJ по интеллектуальным роботам и системам, 2007 г.
IROS 2007 (стр. 919–924). IEEE.Баласубраманян Р., Сюй Л., Брук П. Д., Смит Дж. Р. и Мацуока Ю. (2014). Физическое интерактивное руководство человека: определение принципов захвата из запланированных человеком захватов. Springer Tracts в Advanced Robotics , 95 (4), 477–500. https://doi.org/10.1007/978-3-319-03017-3_22.
Артикул Google Scholar
Баум М., Бернштейн М., Мартин-Мартин Р., Хофер С., Кулик Дж., Туссен М. и др. (2017). Открытие сейфа посредством физического исследования. Международная конференция IEEE-RAS по роботам-гуманоидам (том, часть F1341, стр. 461–467). https://doi.org/10.1109/HUMANOIDS.2017.8246913.
Бергер, М., Тальязакки, А., Северский, Л.М., Аллиез, П., Геннебо, Г., Левин, Дж.А., и соавт. (2017). Обзор реконструкции поверхности по облакам точек. Форум компьютерной графики , 36 (1), 301–329. https://doi.org/10.1111/cgf.
12802.Артикул Google Scholar
Бинфорд, Т. О. (1971). Зрительное восприятие компьютером. В Материалы конференции IEEE по системам и управлению .
Бобок Р., Мога Х. и Талаба Д. (2012). Обзор текущих приложений в дистанционном управлении мобильными роботами. Бюллетень Трансильванского университета в Брашове Серия I: Технические науки , 5 (54), 9–16.
Google Scholar
Брук, П., Чиокарли, М., и Сяо, К. (2011). Совместное планирование захвата с несколькими объектными представлениями. В Робототехника и автоматизация (ICRA) (стр. 2851–2858). https://doi.org/10.1109/ICRA.2011.5980490.
Брюнинкс, Х., и Де Шуттер, Дж. (‘). Спецификация силовых действий в «формализме рамок задач» – синтезе. IEEE Transactions on Robotics and Automation, 12 (4), 581–589.
Бюлер, Дж.
Э. (2015). Возможности гетерогенных мультироботных систем . Кандидат наук. диссертация, Университет Нового Южного Уэльса, Сидней, СиднейЧанг А. К., Функхаузер Т., Гибас Л., Ханрахан П., Хуанг К., Ли З., Саварезе С., Савва М., Сонг С., Су Х. , Сяо, Дж., И, Л., и Ю, Ф. (2015). ShapeNet: информационный репозиторий 3D-моделей. https://doi.org/10.1145/3005274.3005291. архив: 1512.03012.
Чеботарь Ю., Хаусман К., Су З., Сухатме Г. С. и Шаал С. (2016). Повторное схватывание под самоконтролем с использованием пространственно-временных тактильных признаков и обучения с подкреплением. Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS) 2016 г. (стр. 1960–1966). IEEE.
Чокарли, М., Голдфедер, К., и Аллен, П. (2007). Ловкий захват с помощью собственных захватов: низкоразмерный подход к проблеме высокой сложности. В Proceedings of the robotics: Science & systems 2007 Workshop-Sensing and Adaptation to real world, опубликовано в электронном виде .
Чокарли М., Сяо К., Джонс Э. Г., Читта С., Русу Р. Б. и Шукан И. А. (2014). На пути к надежному захвату и манипулированию в домашних условиях. Springer Tracts в Advanced Robotics , 79 , 241–252. https://doi.org/10.1007/978-3-642-28572-1_17.
Артикул Google Scholar
Чокарли, М. Т., и Аллен, П. К. (2009). Подпространства положения рук для ловких роботизированных захватов. The International Journal of Robotics Research , 28 (7), 851–867.
Артикул Google Scholar
Данг, Х., и Аллен, П.К. (2012). Семантическое захватывание: планирование роботизированных захватов, функционально подходящих для задачи манипулирования объектами. Международная конференция IEEE/RSJ 2012 г. по интеллектуальным роботам и системам (IROS) (стр. 1311–1317). IEEE.
Драган, А.Д., и Шриниваса, С.С. (2012).
Асситивное телеуправление для задач манипулирования. В 2012 г. 7-я международная конференция ACM / IEEE по взаимодействию человека и робота (HRI) (стр. 123–124).Эквалл, С., и Крагич, Д. (2007). Изучение и оценка вектора подхода для автоматической генерации захвата и планирования. В материалах — международная конференция IEEE по робототехнике и автоматизации (стр. 4715–4720). https://doi.org/10.1109/РОБОТ.2007.364205.
Фэллон М., Куиндерсма С., Каруманчи С., Антоне М., Шнайдер Т., Дай Х. и др. (2015). Архитектура для онлайн-восприятия на основе возможностей и планирования всего тела. Журнал полевой робототехники , 32 (2), 229–254.
Артикул Google Scholar
Фархатдинов И., Рю Дж. Х. и Ан Дж. (2010). Предварительное экспериментальное исследование тактильного телеуправления мобильным роботом с переменным усилением силовой обратной связи. На симпозиуме Haptics (стр.
251–256). IEEE.Филд А., Майлз Дж. и Филд З. (2012). Обнаружение статистики с помощью R . Тысяча дубов: публикации Sage.
Google Scholar
Франк-Болтон, П. (2018). Аннотационные подмости для робототехники . Кандидат наук. диссертация, Университет Джорджа Вашингтона.
Фриче Л., Унверзаг Ф., Питерс Дж. и Каландра Р. (2015). Телеуправление роботом-гуманоидом от первого лица. 2015 г. 15-я международная конференция IEEE-RAS по роботам-гуманоидам (гуманоидам) (стр. 997–1002). IEEE.
Голдфедер, К., Чиокарли, М., Данг, Х., и Аллен, П.К. (2009). База данных Колумбии. В материалах — международная конференция IEEE по робототехнике и автоматизации (стр. 1710–1716). https://doi.org/10.1109/РОБОТ.2009.5152709.
Харт, С.Г., и Стейвленд, Л.Е. (1988). Разработка nasa-tlx (индекс рабочей нагрузки): результаты эмпирических и теоретических исследований.
В Успехи психологии (Том 52, стр. 139–183). Эльзевир.Хаусман К., Ниекум С., Осентоски С. и Сукхатме Г. С. (2015). Оценка модели активной артикуляции посредством интерактивного восприятия. В материалах — Международная конференция IEEE по робототехнике и автоматизации (том 2015 г. — июнь, стр. 3305–3312). https://doi.org/10.1109/ICRA.2015.7139655.
Херткорн, К. (2016). Совместное захватывание: комбинация телеприсутствия и планирования охвата . Карлсруэ: KIT Scientific Publishing.
Google Scholar
Херцог А., Калакришнан М., Ригетти Л., Богг Дж., Пастор П. и Шаал С. (2012). Исследование выбора захвата на основе шаблона. В 2012 г. международная конференция IEEE по робототехнике и автоматизации (ICRA) (Том 60, № 3). https://doi.org/10.1007/s10514-013-9366-8.
Хоган Ф., Бауза М., Канал О., Донлон Э. и Родригес А. (2018). Тактильный повторный захват: корректировка хвата посредством имитации тактильных преобразований (стр.
29).63–2970). https://doi.org/10.1109/IROS.2018.8593528.Сяо, К., Читта, С., Чиокарли, М., и Джонс, Э. Г. (2010). Контактно-реактивное захватывание объектов с частичной информацией о форме. Международная конференция IEEE/RSJ 2010 по интеллектуальным роботам и системам , IROS 2010 — материалы конференции (стр. 1228–1235). https://doi.org/10.1109/IROS.2010.5649494.
Ху Р., Ли В., Ван Кайк О., Шамир А., Чжан Х. и Хуанг Х. (2017). Обучение прогнозированию подвижности деталей по одному статическому снимку. ACM Transactions on Graphics (TOG) , 36 (6), 227.
Статья Google Scholar
Ху, Р., Савва, М., и ван Кайк, О. (2018). Функциональные представления и приложения для анализа формы. Форум по компьютерной графике, Интернет-библиотека Wiley , 37 , 603–624.
Артикул Google Scholar
Хуанг, X.
, Уокер, И., и Берчфилд, С. (2014). Многоракурсная реконструкция сочлененных объектов с учетом окклюзии для манипуляций. Робототехника и автономные системы , 62 (4), 497–505. https://doi.org/10.1016/j.robot.2013.12.006.Артикул Google Scholar
Исигуро Ю., Кодзима К., Сугай Ф., Нодзава С., Какиути Ю., Окада К. и Инаба М. (2017). Двуногая ориентированная система ведущий-ведомый всего тела для динамического безопасного передвижения с ограничениями безопасности губ. Международная конференция IEEE/RSJ по интеллектуальным роботам и системам (IROS) 2017 г. (стр. 376–382). IEEE.
Цзян Ю., Лим М., Чжэн К., Саксена А., Лим М. и Саксена А. (2012) Обучение размещению новых объектов. В материалах — международная конференция IEEE по робототехнике и автоматизации (стр. 3088–3095). https://doi.org/10.1109/ICRA.2012.6224581. архив: 1105.3107.
Джонсон-Роберсон, М.
, Бог, Дж., Сканце, Г., Густафсон, Дж., Карлсон, Р., Расолзаде, Б., и Крагич, Д. (2011). Улучшенное понимание визуальной сцены благодаря диалогу человека и робота. В Международная конференция IEEE по интеллектуальным роботам и системам (стр. 3342–3348). https://doi.org/10.1109/IROS.2011.6048219.Капплер Д., Пастор П., Калакришнан М., Вутрих М. и Шаал С. (2015). Принятие онлайн-решений на основе данных для автономного управления. В Робототехника: Наука и системы XI . https://doi.org/10.15607/RSS.2015.XI.044.
Кац, Д., Каземи, М., Багнелл, Дж. А., и Стенц, А. (2013). Интерактивная сегментация, отслеживание и кинематическое моделирование неизвестных трехмерных сочлененных объектов. В Международная конференция IEEE по робототехнике и автоматизации (ICRA), 2013 г., (стр. 5003–5010). IEEE.
Кент, Д., Салдана, К., и Чернова, С. (2017). Сравнение интерфейсов телеуправления удаленными роботами для общего управления объектами.
В Материалах международной конференции ACM/IEEE 2017 г. по взаимодействию человека и робота (стр. 371–379). АКМ.Ким, Д. И., и Сукхатме, Г. С. (2014). Семантическая маркировка трехмерных облаков точек с доступностью объектов для манипулирования роботом. В Материалы международной конференции IEEE по робототехнике и автоматизации (стр. 5578–5584). https://doi.org/10.1109/ICRA.2014.6907679.
Кротков Э., Хакетт Д., Джекел Л., Першбахер М., Пиппин Дж., Штраус Дж. и др. (2016). Финал конкурса робототехники darpa: итоги и перспективы: финал конкурса робототехники darpa. Журнал полевой робототехники ,. https://doi.org/10.1002/rob.21683.
Артикул Google Scholar
Крускал, У. Х., и Уоллис, У. А. (1952). Использование рангов в однокритериальном дисперсионном анализе. Журнал Американской статистической ассоциации , 47 (260), 583–621.
Артикул Google Scholar
Липер, А.
Э., Сяо, К., Чиокарли, М., Такаяма, Л., и Госсоу, Д. (2012). Стратегии роботизированного захвата человека в петле. В Материалы седьмой ежегодной международной конференции ACM/IEEE по взаимодействию человека и робота (стр. 1–8). АКМ.Ли, Ю., и Поллард, Н.С. (2005). Алгоритм сопоставления форм для синтеза человеческих обволакивающих захватов. В 2005 г. 5-я международная конференция IEEE-RAS по роботам-гуманоидам (стр. 442–449). IEEE.
Липтон, Дж. И., Фэй, А. Дж., и Рус, Д. (2018). Гомункул Бакстера: пространства виртуальной реальности для телеуправления на производстве. IEEE Robotics and Automation Letters , 3 (1), 179–186.
Артикул Google Scholar
Марион, П., Фэллон, М., Дейтс, Р., Валенсуэла, А., Перес Д’Арпино, К., Изатт, Г., и др. (2017). Директор: пользовательский интерфейс, предназначенный для работы робота с общей автономией. Журнал полевой робототехники , 34 (2), 262–280.
Артикул Google Scholar
Мартин-Мартин Р., Хофер С. и Брок О. (2016). Комплексный подход к зрительному восприятию сочлененных объектов. В Международная конференция IEEE по робототехнике и автоматизации (ICRA) , 2016 г. (стр. 5091–5097). https://doi.org/10.1109/ICRA.2016.7487714.
Мартинс, Х., Окли, И., и Вентура, Р. (2015). Проектирование и оценка головного дисплея для иммерсивного трехмерного дистанционного управления полевыми роботами. Robotica , 33 (10), 2166–2185.
Артикул Google Scholar
Мейсон, М. Т. (1981). Податливость и контроль силы для манипуляторов, управляемых компьютером. Транзакции IEEE по системам, человеку и кибернетике , 11 (6), 418–432.
Артикул Google Scholar
Миллер, А. Т., и Аллен, П. К. (2004). Хватка! универсальный тренажер для роботизированного захвата.
Журнал IEEE Robotics & Automation , 11 (4), 110–122.Артикул Google Scholar
Миллер А.Т., Кнуп С., Кристенсен Х.И. и Аллен П.К. (2003). Автоматическое планирование захвата с использованием примитивов формы. В Международная конференция IEEE по робототехнике и автоматизации (том 2, стр. 1824–1829). https://doi.org/10.1109/РОБОТ.2003.1241860.
Ньюкомб Р. А., Изади С., Хиллигес О., Молино Д., Ким Д., Дэвисон А. Дж., Кохи П., Шоттон Дж., Ходжес С. и Фитцгиббон, А. (2011). Kinectfusion: отображение и отслеживание плотных поверхностей в реальном времени. В 2011 г. 10-й международный симпозиум IEEE по смешанной и дополненной реальности (ISMAR) (стр. 127–136). IEEE.
Никандрова Е. и Кирки В. (2015). Понимание конкретных задач на основе категорий. Робототехника и автономные системы , 70 , 25–35.
Артикул Google Scholar
Нортон А.
, Обер В., Бараниецкий Л., Макканн Э., Шольц Дж., Шейн Д. и др. (2017). Анализ взаимодействия человека и робота в финале конкурса робототехники DARPA. Международный журнал исследований робототехники , 36 , 1–42. https://doi.org/10.1177/0278364916688254.Артикул Google Scholar
Осентоски С., Крик К., Джей Г. и Дженкинс О.К.О. (2010). Краудсорсинг для замкнутого цикла управления. В Материалы семинара NIPS по вычислительным социальным наукам и мудрости толпы, NIPS (стр. 4–7).
Пиллаи, С., Уолтер, М. Р., и Теллер, С. (2015). Обучение артикуляционным движениям по наглядной демонстрации. архив: 1502.01659.
Поллард, Н.С., Ходжинс, Дж.К., Райли, М.Дж., и Аткесон, К.Г. (2002). Адаптация движений человека для управления роботом-гуманоидом. В международной конференции IEEE по робототехнике и автоматизации, 2002. Материалы. ICRA’02 (Том 2, стр. 1390–1397).
IEEE.R-Core-Team. (2017). R: Язык и среда для статистических вычислений . Вена, Австрия: R Foundation for Statistical Computing.
Google Scholar
Рамос Дж., Ван А. и Ким С. (2015). Человеко-машинный интерфейс с обратной связью баланса для телеопераций гуманоидов в динамических задачах. На международной конференции IEEE по интеллектуальным роботам и системам (Том 2015-декабрь, стр. 4229–4235). https://doi.org/10.1109/IROS.2015.7353976.
Ровида Ф., Кросби М., Хольц Д., Полидорос А. С., Гроссманн Б., Петрик Р. П. и Крюгер В. (2017). Skiros — основанная на навыках платформа управления роботом поверх ros. В Операционная система для роботов (ROS) (стр. 121–160). Спрингер.
Русу, Р. Б., и Казинс, С. (2011). 3D уже здесь: Библиотека облаков точек (PCL). В международная конференция IEEE по робототехнике и автоматизации (ICRA), Шанхай, Китай .
Шумейк, К. (1985). Анимация вращения с помощью кватернионных кривых. В компьютерной графике ACM SIGGRAPH (том 19, стр. 245–254). АКМ.
Сингх А., Сео С. Х., Хашиш Ю., Накане М., Янг Дж. Э. и Бунт А. (2013). Интерфейс для удаленного управления роботизированным манипулятором, который снижает нагрузку и утомляемость. РОМАН (стр. 738–743). IEEE.
Сорокин А., Беренсон Д., Шриниваса С.С. и Хеберт М. (2010). Люди помогают роботам помогать людям: краудсорсинг для захвата новых объектов. В Международная конференция IEEE/RSJ 2010 по интеллектуальным роботам и системам, IROS 2010 — материалы конференции (стр. 2117–2122). https://doi.org/10.1109/IROS.2010.5650464.
Сент-Джон, М., Коуэн, М.Б., Смоллман, Х.С., и Унк, Х.М. (2001). Использование 2D- и 3D-дисплеев для понимания формы по сравнению с задачами относительного положения. Человеческий фактор , 43 (1), 79–98.
Артикул Google Scholar
Штурм, Дж.
(2013). Изучение кинематических моделей сочлененных объектов. Springer Tracts в Advanced Robotics , 89 , 65–111. https://doi.org/10.1007/978-3-642-37160-8_4.Артикул Google Scholar
Штурм Дж., Джейн А., Стахнисс К., Кемп. К. и Бургард В. (2010). Эксплуатация сочлененных объектов на основе опыта. В Международная конференция IEEE/RSJ 2010 г. по интеллектуальным роботам и системам (IROS) (стр. 2739–2744). https://doi.org/10.1109/IROS.2010.5653813.
Сукан, И. А. Урдф. Получено с http://wiki.ros.org/urdf, март 2019 г.
Сукан, И. А., и Читта, С. (2013). Подвинь это! http://moveit.ros.org.
Сун, Дж., Джин, С.Х., и Саксена, А. (2015). Робобариста: перенос траекторий манипулирования на основе части объекта из краудсорсинга в 3D Pointclouds. https://doi.org/10.1007/978-3-319-60916-4_40. архив: 1504.03071.
Тенорт, М., Перзило, А.
 IROS 2007 (стр. 919–924). IEEE.
IROS 2007 (стр. 919–924). IEEE. 12802.
12802. Э. (2015). Возможности гетерогенных мультироботных систем . Кандидат наук. диссертация, Университет Нового Южного Уэльса, Сидней, Сидней
Э. (2015). Возможности гетерогенных мультироботных систем . Кандидат наук. диссертация, Университет Нового Южного Уэльса, Сидней, Сидней
 Асситивное телеуправление для задач манипулирования. В 2012 г. 7-я международная конференция ACM / IEEE по взаимодействию человека и робота (HRI) (стр. 123–124).
Асситивное телеуправление для задач манипулирования. В 2012 г. 7-я международная конференция ACM / IEEE по взаимодействию человека и робота (HRI) (стр. 123–124). 251–256). IEEE.
251–256). IEEE. 29).63–2970). https://doi.org/10.1109/IROS.2018.8593528.
29).63–2970). https://doi.org/10.1109/IROS.2018.8593528. , Уокер, И., и Берчфилд, С. (2014). Многоракурсная реконструкция сочлененных объектов с учетом окклюзии для манипуляций. Робототехника и автономные системы , 62 (4), 497–505. https://doi.org/10.1016/j.robot.2013.12.006.
, Уокер, И., и Берчфилд, С. (2014). Многоракурсная реконструкция сочлененных объектов с учетом окклюзии для манипуляций. Робототехника и автономные системы , 62 (4), 497–505. https://doi.org/10.1016/j.robot.2013.12.006. , Бог, Дж., Сканце, Г., Густафсон, Дж., Карлсон, Р., Расолзаде, Б., и Крагич, Д. (2011). Улучшенное понимание визуальной сцены благодаря диалогу человека и робота. В Международная конференция IEEE по интеллектуальным роботам и системам (стр. 3342–3348). https://doi.org/10.1109/IROS.2011.6048219.
, Бог, Дж., Сканце, Г., Густафсон, Дж., Карлсон, Р., Расолзаде, Б., и Крагич, Д. (2011). Улучшенное понимание визуальной сцены благодаря диалогу человека и робота. В Международная конференция IEEE по интеллектуальным роботам и системам (стр. 3342–3348). https://doi.org/10.1109/IROS.2011.6048219. В Материалах международной конференции ACM/IEEE 2017 г. по взаимодействию человека и робота (стр. 371–379). АКМ.
В Материалах международной конференции ACM/IEEE 2017 г. по взаимодействию человека и робота (стр. 371–379). АКМ.
 Журнал IEEE Robotics & Automation , 11 (4), 110–122.
Журнал IEEE Robotics & Automation , 11 (4), 110–122.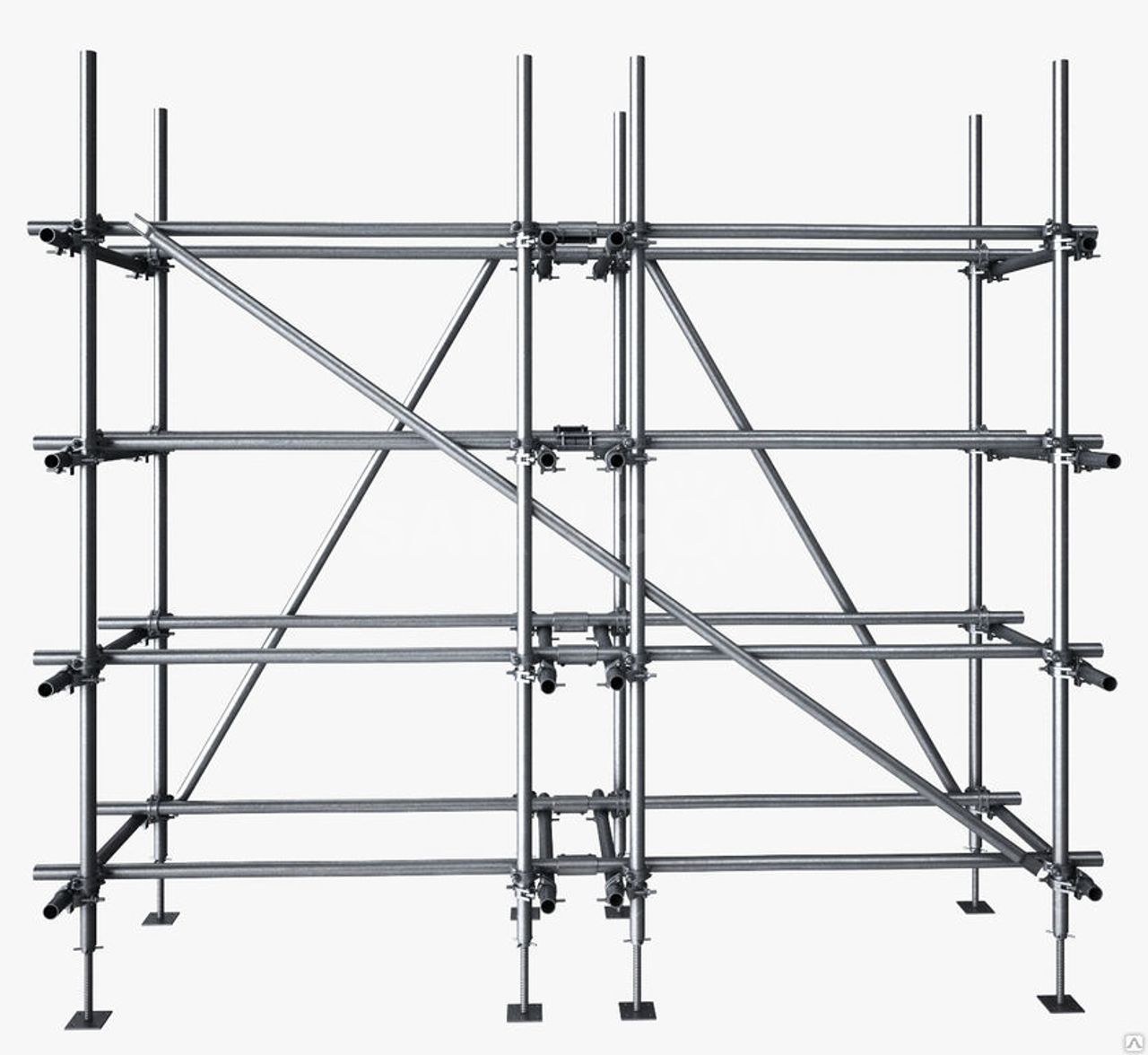 , Обер В., Бараниецкий Л., Макканн Э., Шольц Дж., Шейн Д. и др. (2017). Анализ взаимодействия человека и робота в финале конкурса робототехники DARPA. Международный журнал исследований робототехники , 36 , 1–42. https://doi.org/10.1177/0278364916688254.
, Обер В., Бараниецкий Л., Макканн Э., Шольц Дж., Шейн Д. и др. (2017). Анализ взаимодействия человека и робота в финале конкурса робототехники DARPA. Международный журнал исследований робототехники , 36 , 1–42. https://doi.org/10.1177/0278364916688254. IEEE.
IEEE.
 (2013). Изучение кинематических моделей сочлененных объектов. Springer Tracts в Advanced Robotics , 89 , 65–111. https://doi.org/10.1007/978-3-642-37160-8_4.
(2013). Изучение кинематических моделей сочлененных объектов. Springer Tracts в Advanced Robotics , 89 , 65–111. https://doi.org/10.1007/978-3-642-37160-8_4.