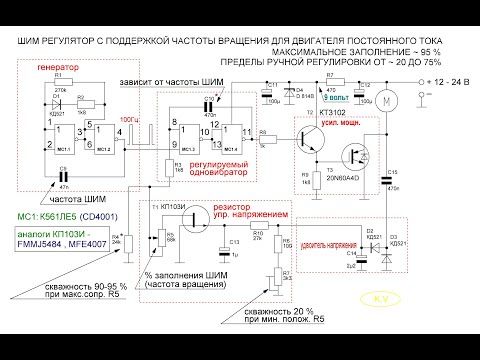
СХЕМА ШИМ РЕГУЛЯТОРА
Регулировка оборотов электродвигателей в современной электронной технике достигается не изменением питающего напряжения, как это делалось раньше, а подачей на электромотор импульсов тока, разной длительности. Для этих целей и служат, ставшие в последнее время очень популярными – ШИМ (широтно-импульсно модулируемые) регуляторы. Схема универсальная – она же и регулятор оборотов мотора, и яркости ламп, и силы тока в зарядном устройстве.
Схема ШИМ регулятора
Указанная схема отлично работает, печатная плата прилагается.
Без переделки схемы напряжение можно поднимать до 16 вольт. Транзистор ставить в зависимости от мощности нагрузки.
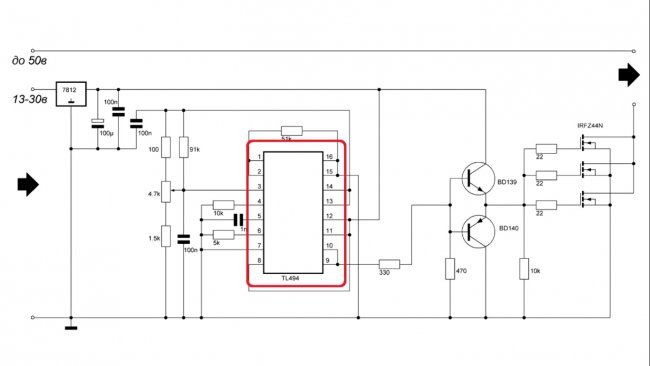
Можно собрать ШИМ регулятор и по такой электрической схеме, с обычным биполярным транзистором:
А при необходимости, вместо составного транзистора КТ827 поставить полевой IRFZ44N, с резистором R1 – 47к.
Работа ШИМ регулятора
Таймер на микросхеме NE555 следит за напряжением на конденсаторе С1, которое снимает с вывода THR. Как только оно достигнет максимума – открывается внутренний транзистор. Который замыкает вывод DIS на землю. При этом на выходе OUT появляется логический ноль. Конденсатор начинает разряжаться через DIS и когда напряжение на нем станет равно нулю – система перекинется в противоположное состояние — на выходе 1, транзистор закрыт. Конденсатор начинает снова заряжаться и все повторяется вновь.
Заряд конденсатора С1 идет по пути: «R2->верхнее плечо R1 ->D2«, а разряд по пути: D1 -> нижнее плечо R1 -> DIS. Когда вращаем переменный резистор R1, у нас меняются соотношения сопротивлений верхнего и нижнего плеча. Что, соответственно, меняет отношение длины импульса к паузе. Частота задается в основном конденсатором С1 и еще немного зависит от величины сопротивления R1.
Рекомендации по сборке и настройке
Диоды можно ставить любые, конденсаторы примерно такого номинала, как на схеме. Отклонения в пределах одного порядка не влияют существенно на работу устройства. На 4.7 нанофарадах, поставленных в С1, например, частота снижается до 18кГц, но ее почти не слышно.
Если после сборки схемы греется ключевой управляющий транзистор, то скорее всего он полностью не открывается. То есть на транзисторе большое падение напряжения (он частично открыт) и через него течет ток. В результате рассеивается большая мощность, на нагрев. Желательно схему параллелить по выходу конденсаторами большой емкости, иначе будет петь и плохо регулировать. Чтобы не свистел – подбирайте С1, свист часто идет от него.
Форум по широтно-импульсным регуляторам
ШИМ регулятор оборотов двигателя 10-60В, 20А
ШИМ регулятор оборотов коллекторного двигателя постоянного тока DC 10-60В 40А с выносным регулятором.
ШИМ регулятор мощности имеет самое широкую область применения. Это регулятор хода
коллекторных двигателей, диммер для светодиодов и светодиодных лент, реобас для майнинг фермы.Регулятор напряжения постоянного тока изменяет значение выходного напряжения в диапазоне от 10 вольт до 60 Вольт с максимальной нагрузкой до 20 Ампер и мощностью до 1200 Ватт.
Профессиональная версия ШИМ-контроллера, адаптированная для непрерывной работы.
Применение:
- плавное регулирование частоты вращения коллекторных электродвигателей (вентиляторы, вакуумные масляные насосы, лопасти, двигатели стеклоочистителей и т. д.)
- реобас для майнинг фермы
- регулировка яркости свечения галогеновых ламп 12В/24В, или ламп накаливания 12В/24В/36В/48В
- регулировка силы света (диммер) (светодиоды и светодиодные ленты без мерцания)
- регулирование мощности нагревателей, резистивных проволочных нагревателей и других резистивных элементов
ШИМ регулятор оборотов используется для регулирования оборотов мощных вентиляторов, это реобас для майнинг фермы. Вентиляторы подключаются параллельно и для соединения вентиляторов используются только черный и красный провода.
Управление скоростью двигателя осуществляется с помощью выносного регулировочного резистора на 10 кОм с ручкой.
- Используется для точной регулировки скорости.

- Высокая эффективность, высокий крутящий момент, низкий нагрев.
- С защитой от обратной полярности, с высокой защитой по току.
- Предназначен для управления нагрузкой до 20 А. Рекомендуемая длительная нагрузка 10 A, 450 Вт.
- Внимание! При использование модуля для регулировки на нагрузках близких к 20 А необходимо дополнительное охлаждение.
- Потенциометр управления скважностью импульсов позволяет производить регулировку мощности от нуля до максимального значения

Характеристики
Напряжение питания: 10 – 60 В постоянного тока
Максимальный ток: 20 А
Непрерывный ток: 18 А
Максимальная мощность: 1200 Вт
Диапазон управления скоростью двигателя: от 0 до 100%
Частота ШИМ: 25 кГц
Размеры: 77 х 45 х 28 мм
Схема подключения:
На плате регулятора имеется 4 винтовых клеммы для подключения двигателя и питания. На задней стороне платы есть обозначения клемм.
Клеммы Power + и Power- подключаем к источнику питания соответственно + и – (например, к аккумулятору)
Клеммы Motor+ и Motor- подключаем к электродвигателю постоянного тока в соответствующей полярности (при смене полярности, двигатель будет вращаться в другую сторону).
Управление скоростью двигателя постоянного тока с помощью широтно-импульсной модуляции, 555
Краткое описание
Введение
В этом проекте я покажу, как можно реализовать управление скоростью двигателя постоянного тока с помощью 555 и широтно-импульсной модуляции (ШИМ).
В повседневной жизни мы используем двигатели постоянного тока во многих системах. Например, вентиляторы ЦП, огнетушители, игрушечные машинки и т. д. — все это двигатели постоянного тока, которые работают от источника питания постоянного тока. В большинстве случаев нам придется регулировать скорость двигателей в соответствии с нашими требованиями.
Например, вентилятор ЦП должен работать на высокой скорости, когда ЦП выполняет тяжелые задачи, такие как игры или редактирование видео.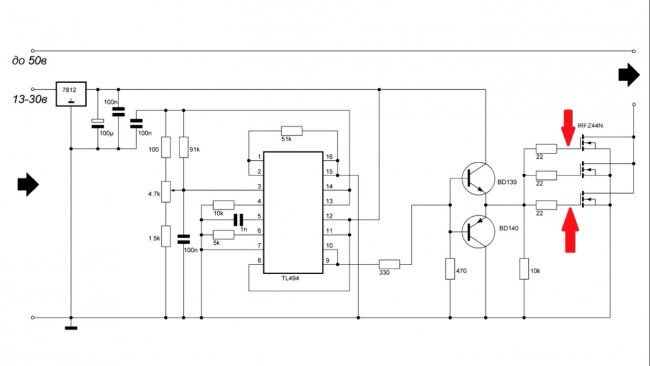 Но для обычного использования, такого как редактирование документов, скорость вращения вентилятора можно уменьшить.
Но для обычного использования, такого как редактирование документов, скорость вращения вентилятора можно уменьшить.
Хотя некоторые системы имеют систему автоматической регулировки скорости вращения вентилятора, не все системы обладают этой функцией. Таким образом, нам придется время от времени самостоятельно регулировать скорость двигателя постоянного тока.
[адсенс1]
Как реализовано управление скоростью двигателя постоянного тока?
Существует несколько способов ручной регулировки скорости двигателя постоянного тока. Самый простой способ добиться этого — использовать переменный резистор, т. е. мы можем регулировать скорость двигателя постоянного тока, используя последовательно с двигателем переменное сопротивление.
Но этот метод обычно не готовят по двум причинам. Первая причина – потеря энергии, т. е. резистор рассеивает избыточную энергию в виде тепла. Вторая причина заключается в том, что если мы хотим использовать какие-либо устройства, такие как микроконтроллеры или любое другое цифровое оборудование, для автоматизации управления скоростью нашего двигателя постоянного тока, то этот метод использовать нельзя.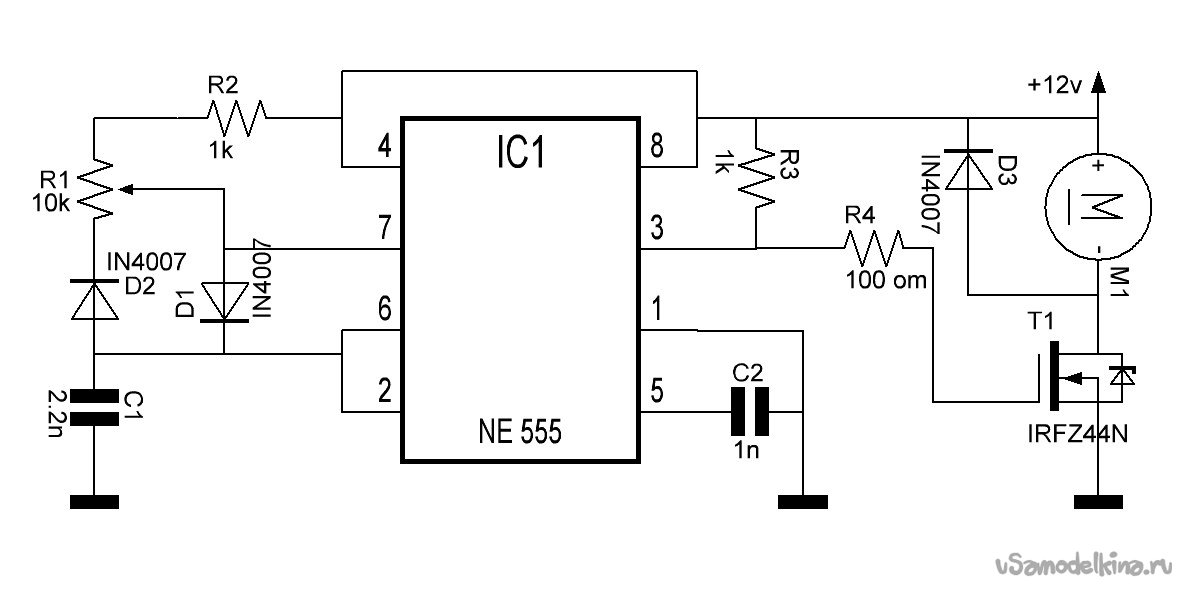
Более эффективным способом является использование широтно-импульсной модуляции для управления скоростью нашего двигателя постоянного тока.
Также прочитайте соответствующую публикацию — Контроллер шагового двигателя с использованием микроконтроллера AT89C51
Принципиальная схема управления скоростью двигателя постоянного тока на основе ШИМ
Необходимые компоненты
- 555 ИС таймера
- Двигатель постоянного тока 12 В
- 1N5819 x 2
- 1N4007
- 100 нФ
- 100 пФ
- Резистор 10 кОм
- Потенциометр 100 кОм
- IRF540 МОП-транзистор
- Мини-макет
- Источник питания 12 В
- Соединительные провода
Схема
Я не буду объяснять схему выводов микросхемы 555 и предполагаю, что вы уже с ней знакомы. Продолжая проектирование схемы, контакт 1 из 555 подключен к GND. Контакты 8 и 4 подключены к источнику питания +12 В.
Контакты 6 и 2 короткие, и между контактом 2 и GND подключен конденсатор емкостью 100 нФ. Контакт потенциометра потенциометра подключен к контакту 3 микросхемы 555. Два диода Шоттки (1N5819) подключены к двум другим контактам POT, как показано на принципиальной схеме.
Общая точка диодов подключена к контакту 2. Контакт 7 подключен к высокому уровню с помощью резистора 10 кОм. Клемма Gate MOSFET подключена к контакту 7 555. Двигатель подключен между питанием +12 В и стоком MOSFET, а исток MOSFET подключен к GND.
Диод PN-перехода подключается к клеммам двигателя для предотвращения обратной ЭДС.
ПРИМЕЧАНИЕ: Я не использовал диоды Шоттки, но заменил их простыми диодами 1N4007, так как частота ШИМ меньше (около 220 Гц).
Как работает управление скоростью цепи двигателя постоянного тока?
В этой схеме двигатель постоянного тока управляется интегральной схемой 555. IC 555 в этой схеме работает в нестабильном режиме, который создает непрерывные импульсы HIGH и LOW.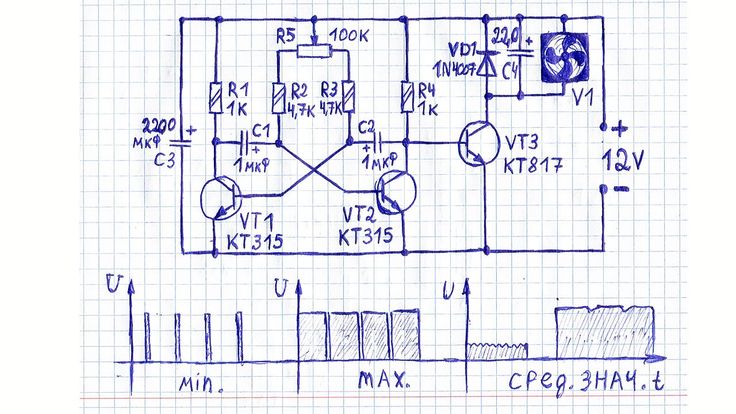
В этом режиме микросхема 555 может использоваться как широтно-импульсный модулятор с небольшими изменениями в схеме. Частота работы схемы обеспечивается пассивными параметрами подключенных к ней сопротивлений и конденсаторов.
[адсенс2]
Прочтите также следующее сообщение: Сигнализация уровня воды с использованием таймера 555
ПРИМЕЧАНИЕ:
- Одна из лучших особенностей этой схемы заключается в том, что вы можете заставить ее работать как нестабильный мультивибратор с небольшими аппаратными средствами и небольшими затратами, что может сэкономить как стоимость, связанную с ее созданием, так и пространство. на печатной плате (PCB).
- Если вам нужен сложный широтно-импульсный модулятор, который работает более точно и имеет больше возможностей настройки, то лучше использовать широтно-импульсный модулятор на основе микроконтроллера, чем тот, который мы используем сейчас.
- Однако схема или приложение, для которого мы используем широтно-импульсный модулятор, не столь чувствительны и, следовательно, не требуют такой высокой точности. В таком случае схема, которую мы используем с голой IC 555, лучше, поскольку она экономит наши денежные и пространственные ресурсы при построении схемы.
- Рабочий цикл цепи можно изменить, изменив значение потенциометра. Если мы увеличим рабочий цикл, скорость двигателя увеличится, а если мы уменьшим рабочий цикл, скорость двигателя уменьшится.
МикроконтроллерВы заинтересованы в реализации этого проекта с использованием микроконтроллера? Тогда перейдите к сообщению — Как работает схема управления скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллера ?
— точность ШИМ в зависимости от точности управления скоростью
\$\начало группы\$
Для двигателей PMSM с инверторным управлением, если мы хотим реализовать высокую точность скорости в установившемся режиме, скажем, 0,2%, т.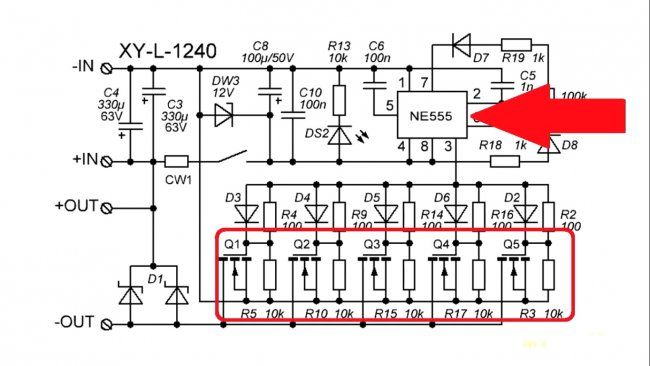 е. +/- 2 об/мин при 1000 об/мин, должна ли точность ШИМ быть лучше, чем она? Или это больше о разрешении PWM?
е. +/- 2 об/мин при 1000 об/мин, должна ли точность ШИМ быть лучше, чем она? Или это больше о разрешении PWM?
Насколько я понимаю, разрешение ШИМ должно быть лучше, скажем, 12-битное, и тогда разрешение не проблема. С другой стороны, на точность ШИМ влияют часы микроконтроллера, на которые влияет внешний кварц/генератор. Если точность ШИМ должна быть лучше, чем точность управления двигателем, то я должен быть очень осторожным при выборе компонентов.
[обновлено]
Другая проблема связана с измерением скорости двигателя. Я предполагаю, что для такого более точного управления скоростью двигателя необходим энкодер, а поскольку доступны 12-битные и даже 15-битные инкрементные энкодеры, поэтому я думаю, что алгоритм определения скорости должен больше обеспечивать точность измеренной скорости, чем 0,2%. Любое предложение по алгоритму обработки кодировщика?
Нагрузка двигателя изменяется медленно, отклонение составляет примерно +/- 5 %.
[обновление-2]
Давайте не будем говорить о таких случаях, как маховики, где инерция огромна, чтобы помочь стабилизировать скорость. Я думаю, что подходящей аналогией будет лезвие блендера, приводимое в движение двигателем PMSM с энкодером, смешивающим небольшое количество фруктов.
Я думаю, что подходящей аналогией будет лезвие блендера, приводимое в движение двигателем PMSM с энкодером, смешивающим небольшое количество фруктов.
- микроконтроллер
- ШИМ
- скорость ротора
\$\конечная группа\$
20
\$\начало группы\$
Давайте не будем говорить о таких случаях, как маховики, где инерция огромна, чтобы помочь стабилизировать скорость
Но мы есть. С типичными современными микроконтроллерами и их встроенными генераторами PWM, а также с типичными двигателями сам двигатель представляет собой маховик, не говоря уже о лопасти, которую вы на него надеваете. Рассмотрим этот двигатель, который разработан , чтобы иметь низкую инерцию (и абсурдно дорогой для разбивания фруктов на кусочки). Это двигатель без сердечника, что означает, что его инерция может быть в пять-двадцать раз меньше, чем у бесщеточного двигателя.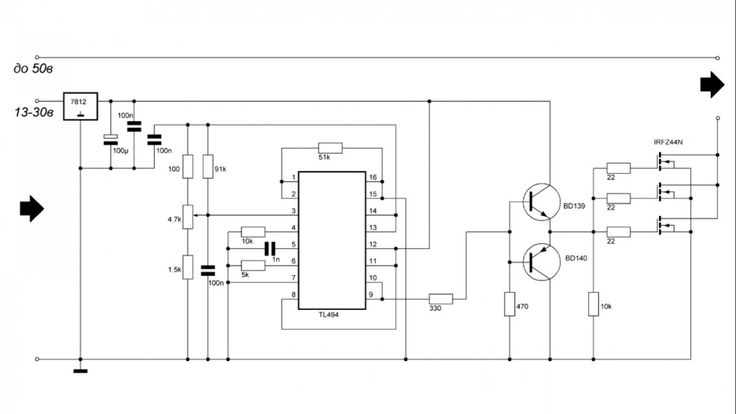
Он имеет механическую постоянную времени 4,87 мс. Это означает, что этот абсурдно быстродействующий двигатель действует как фильтр нижних частот 1-го порядка с частотой 3 дБ 32 Гц.
Чтобы нагромождать абсурд на абсурд, предположим, что вы управляете двигателем PWM с супердешевым микропроцессором, таким как 8-битная часть Atmel, и что по какой-то причине вы решили использовать 8-битные таймеры. Таким образом, у вас есть эффективное разрешение ШИМ 1 из 128. Даже ATMega справится с обновлением ШИМ на частоте 10 кГц – так что предположим, что это так.
Теперь у вас есть разрешение 1:128, что намного хуже, чем 1:500 (0,2%), которое вы называете. Если вы просто сглаживаете ШИМ на частоте 625 Гц, вы можете увеличить эффективное разрешение в 16 раз, что значительно превышает необходимое вам значение 1:500. Еще лучше реализовать в своем программном обеспечении простой сигма-дельта модулятор 1-го порядка, тогда вы увеличите эффективное разрешение ШИМ примерно на 300, или чуть более 15 бит. Вы могли бы подумать о реализации сигма-дельта еще более высокого порядка, но вы уже находитесь на смехотворном уровне разрешения по сравнению с тем, что вам нужно, так зачем туда идти?
Вы могли бы подумать о реализации сигма-дельта еще более высокого порядка, но вы уже находитесь на смехотворном уровне разрешения по сравнению с тем, что вам нужно, так зачем туда идти?
\$\конечная группа\$
\$\начало группы\$
Точность сигнала ШИМ может быть намного лучше, чем вы думаете. Если вы действительно имеете в виду точность коэффициента заполнения , то она не зависит от небольших изменений тактовой частоты процессора. Коэффициент заполнения представляет собой отношение времени высокого импульса к периоду импульса, и оба они являются целыми кратными тактовой частоты процессора. Таким образом, фактическая тактовая частота отменяется.
Единственный способ, которым может пострадать точность, это если тактовая частота значительно изменится в течение каждого периода выхода ШИМ. Это, безусловно, возможно, но эффект, вероятно, намного меньше, чем абсолютная точность кристалла и изменение температуры.![]()
Сказав все это, я не знаю, лучший ли это способ управления двигателем.
\$\конечная группа\$
2
\$\начало группы\$
Важно учитывать точность оптического энкодера. Оптический энкодер измеряет дискретные изменения углового положения, поэтому ваша ошибка положения составляет не более одного отсчета энкодера. Эта ошибка энкодера проявится при вычислении скорости, потому что вам нужно дифференцировать угловое положение (\$\theta\$) по отношению к времени дискретизации (\$T\$), чтобы получить угловую скорость (\$\omega\ $). Дифференциация выполняется численно с использованием текущего счетчика кодировщика \$\theta_{i}\$ и последнего выборочного счетчика кодировщика \$\theta_{i-1}\$.
\начало{уравнение} \ омега = \ гидроразрыва {\ theta_ {i} – \ theta_ {i-1}} {T} \end{equation}
Мы знаем, что наибольшая ошибка составляет 1 шаг энкодера.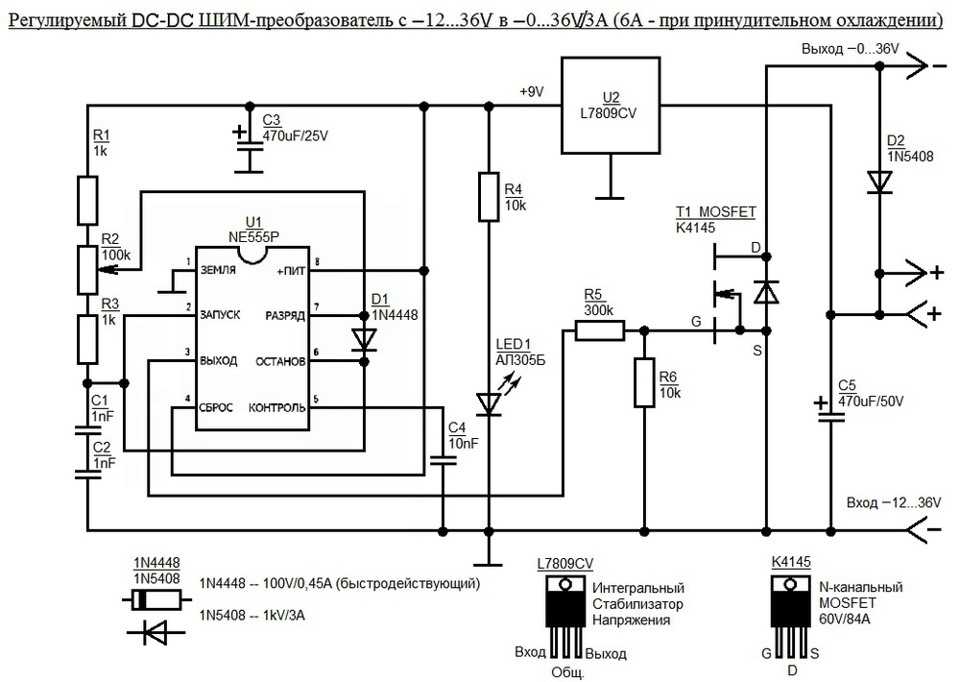 Это означает, что ошибка скорости может быть вычислена следующим образом:
Это означает, что ошибка скорости может быть вычислена следующим образом:
\begin{equation} \omega_{ошибка} = \frac{\theta(1)}{T} \end{equation}
Таким образом, время между выборками энкодера и разрешение энкодера влияют на ошибку вашего измерения. Пример: 12-битный энкодер имеет 1024 периода на оборот (PPR). Это означает, что 4*1024= 4096 индивидуальных шагов. Это означает, что каждый шаг соответствует 0,0878 градусам. Теперь представьте, если бы вы производили выборку этого измерения каждые 0,01 секунды.
\begin{уравнение} \ omega_ {ошибка} = \ frac {\ theta (1)} {T} = \ frac {0,0878} {0,01} = 8,78 \ frac {градус {s} = 1,46 об / мин. \end{equation}
Таким образом, чем дольше вы сэмплируете кодировщик, тем лучшее разрешение вы получаете. Обычно я использую скользящее среднее значение для фильтрации числового результата (\$\omega\$), что уменьшает шум и обеспечивает немного большую стабильность для вашего контроллера.
Что касается ШИМ, я не могу комментировать, если вы не уточните, что вы делаете. Важно отметить, что для вашего алгоритма управления вы должны использовать интегратор для подавления возмущений крутящего момента и достижения целевых скоростей.
Важно отметить, что для вашего алгоритма управления вы должны использовать интегратор для подавления возмущений крутящего момента и достижения целевых скоростей.
\$\конечная группа\$
\$\начало группы\$
ШИМ (разрешение и частота) влияет на точность скорости посредством создания крутящего момента.
пульсация скорости — это форма ускорения (и замедления), на которую влияет инерция нагрузки и крутящий момент. \$T = J \альфа \$
Для стабилизированной системы, где крутящий момент нагрузки равен произведению крутящего момента, больше нет ускорения и достигнута установившаяся скорость. Однако, если есть какое-либо возмущение крутящего момента, это проявится как ускорение -> пульсация скорости
Крутящий момент представляет собой текущее, умноженное на постоянную крутящего момента \$T = K_t \cdot i\$. Таким образом, пульсации тока могут вызывать пульсации крутящего момента, которые вызывают пульсации скорости.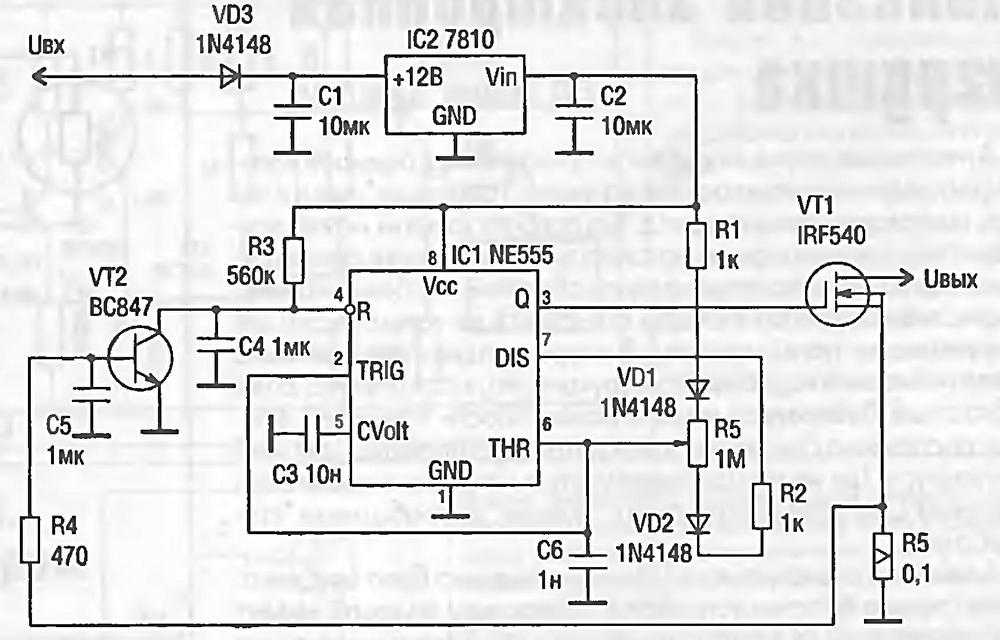
Когда вы управляете двигателем с помощью ШИМ, ваша цель состоит в том, чтобы контролировать «средний» ток. Всегда будет пульсация, когда ток нарастает и падает
Чем выше частота, тем меньше пульсации тока (и, следовательно, меньше пульсации крутящего момента и скорости) Выбор частоты переключения ШИМ в BLDC
А как насчет разрешения ШИМ? Это также играет роль, поскольку наименьший рабочий цикл никогда не бывает достаточно малым для того, чтобы контроллер мог точно управлять режимом работы, который требуется для выполнения команды, и, таким образом, происходит то, что контроллер будет переключаться между двумя замыкающими представляемыми рабочими циклами. Если ваш контроллер имеет разрешение 1%, то контроллер сделает что-то вроде этого: 4% -> 5% -> 4%, если требовалось 4,5%. Это переключение приводит к тому, что на двигатель подается меньшее, большее, меньшее напряжение и, следовательно, еще один источник пульсаций.
Насколько это повлияет на вашу систему, зависит от частоты обновления, дельта-должности, а также задержки распространения через микросхемы интерфейса.