ШИМ регулятор оборотов двигателя
Добрый вечер, друзья! Это первый мой в жизни обзор чего-либо, поэтому готов с радостью выслушать критику и советы.Товар покупался за свои кровные. Подробности ниже.
К заказу этого регулятора, меня натолкнул обзор уважаемого kirich. Поэтому, я сначала заказал точно такой же ШИМ регулятор, но потом для разнообразия закал и героя сегодняшнего обзора.
Заказ был сделан 29 октября, а ко мне в подмосковную Лобню он добрался только 3 декабря. Товар был упакован в стандартный пакетик с пупырками и обильно обмотан поролоном:
Упаковка
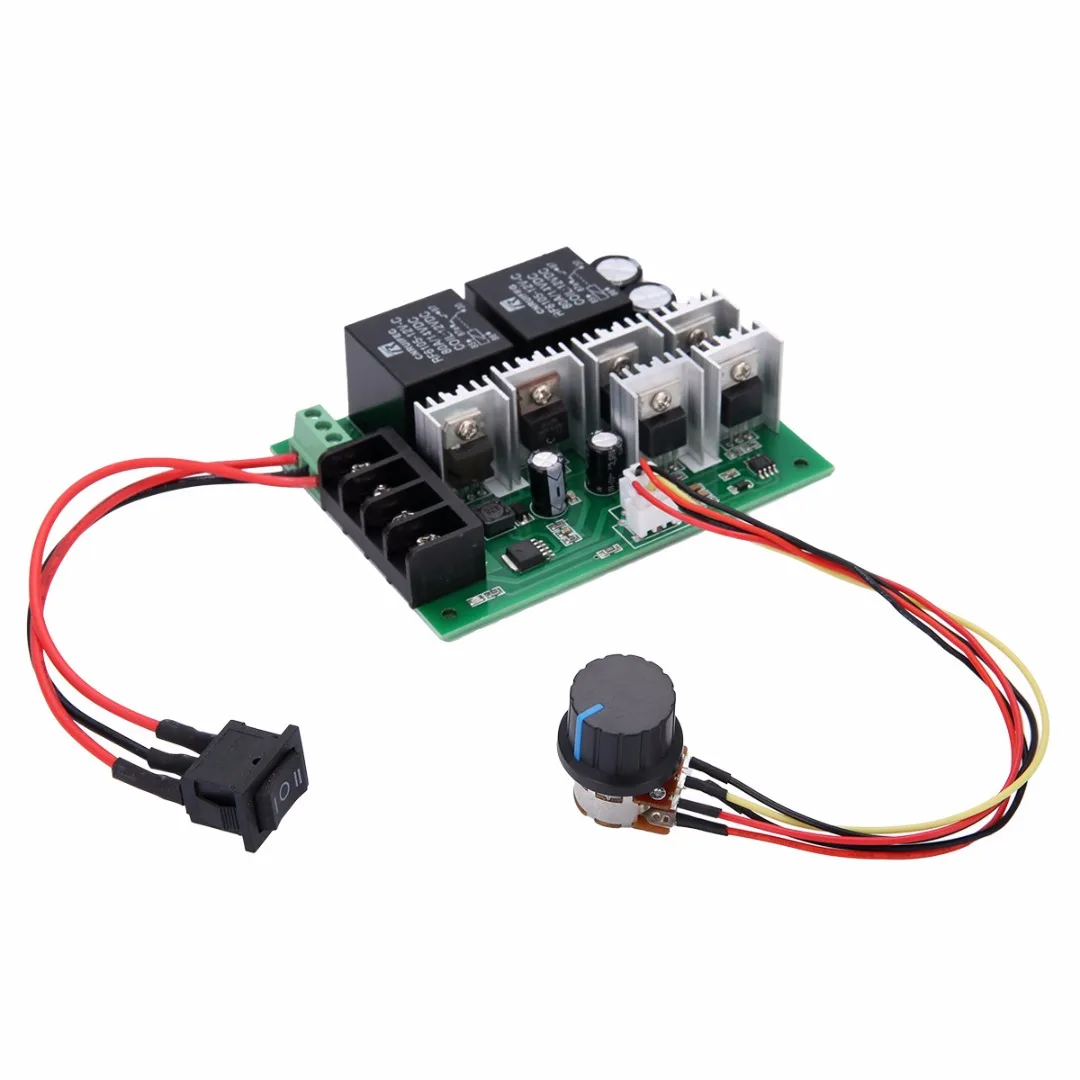
В комплекте только сама плата управления и переменный резистор на 100 кОм, который подключается непосредственно к плате разъемом HU-3 с длиной проводов 19 см, что вполне удобно для монтажа.
Другие ракурсы
Пропайка силовых дорожек мне показалась просто ужасной. Не думал, что наши азиатские друзья буду экономить на припое. Также видно множество следов неотмытого флюса. Возможно это я такой везунчик:
На гуру пайки я не претендую, поэтому решил исправить немного ситуацию. Думаю если бы кому-то пришла плата после моих рук, от китайцев не особо отличили:
Регулятор построен на таймере NE555P, поэтому я думаю не имеет смысла рассказывать про всю схему, да и боюсь пока не хватит для этого знаний =).
Рабочий диапазон напряжения 12-60 Вольт и максимальный ток 20 Ампер. Кстати на одном из фото виден плавкий предохранитель номиналом на 20 Ампер, что по идее должно спасать от превышения номинального тока.
А теперь проверим его в работе. В качестве питания буду использовать старый БП от ноутбука на 19 Вольт и 4.74 Ампера, а мотор от какого-то шуроповерта на 18 Вольт:
Видео самой работы. Прошу прощения за небольшую тряску, т.к. снимал на телефон, а штатива для этого дела не имею:
 youtube.com/embed/BanW4ZQ6mrA?autoplay=0&hl=ru_RU&rel=0″ frameborder=”0″ allowfullscreen=””/>
youtube.com/embed/BanW4ZQ6mrA?autoplay=0&hl=ru_RU&rel=0″ frameborder=”0″ allowfullscreen=””/>
Покупать или нет — дело каждого. Я покупал его для мини сверлильного станка, который надеюсь начать собирать в наступающем году. Конечно, в сети полно схем на эту тематику, но мне пока как новичку захотелось готового решения.
Всем спасибо за внимание, жду Ваших замечаний!
Вместо котэ
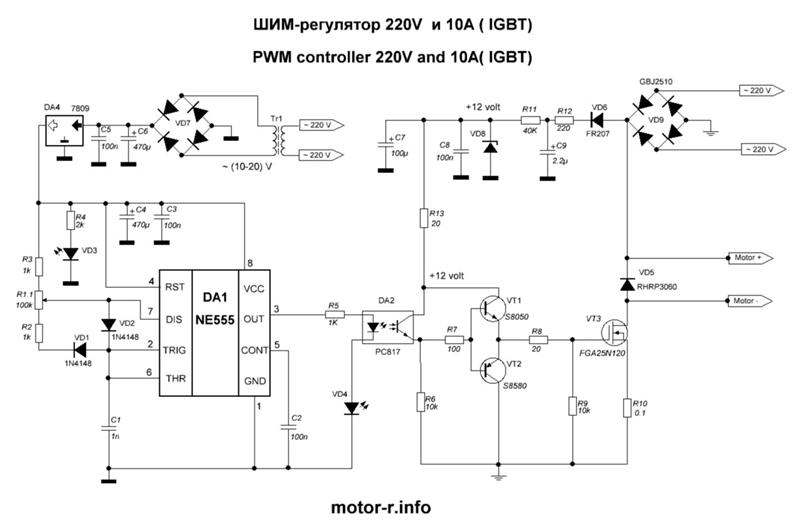
ШИМ регулятор 12В на 555
Представляем простую конструкцию регулятора мощности, схема которого построена на таймере 555, работающем в режиме ШИМ. Транзисторы IRF3205 являются управляемыми элементами, причем транзисторы соединены параллельно для уменьшения сопротивления и лучшего рассеивания тепла.
Схема ШИМ на 12 В для ламп
Напряжение от трансформатора выпрямляется мостом на 50 А, установленным на радиаторе. Подается оно далее на стабилизатор 8 В, а затем в схему управления. Устройство должно было работать с несколькими галогенками 12 В 50 Вт.
Кстати, вы можете хорошо уменьшить нагрев транзисторов снизив частоту коммутации — на это стоит обратить внимание.
При полной яркости будет ток в нагрузке около 25 А. Так что уделите особое внимание винтовым соединительным разъемам. Кабели сечением 1,5 мм2 тоже недостаточны для такого большого тока.
Конечно, затворы лучше переключать напряжением около 10 — 12 В (не более 15 В для безопасности МОП-транзисторов), чем 6 В, хотя бы для того чтобы быть уверенным в их насыщении во включенном состоянии. А более высокое напряжение также означает более быструю перезагрузку затворов, что приводит к более короткому переходному времени, а это снижает потери мощности на них. Если они не насыщаются, то тепло, генерируемое на них с высокой рабочей мощностью, заставит транзисторы сильно греться.
Чтобы поднять управляющее напряжение, достаточно подключить R3 напрямую к источнику питания, а не к стабилизатору.
Чтобы ускорить переключение, предлагаем конденсатор 0.1 мкФ поставить параллельно с R2 и, если необходимо, дополнительно в ряд перед этим параллельным соединением резистор, чтобы минимизировать токи при разряде конденсатора.
 Чтобы ускорить переключение, предлагаем конденсатор 0.1 мкФ поставить параллельно с R2 и, если необходимо, дополнительно в ряд перед этим параллельным соединением резистор, чтобы минимизировать токи при разряде конденсатора.
Чтобы ускорить переключение, предлагаем конденсатор 0.1 мкФ поставить параллельно с R2 и, если необходимо, дополнительно в ряд перед этим параллельным соединением резистор, чтобы минимизировать токи при разряде конденсатора.Вместо резистора R3 ещё лучше ставить резисторы 5-10 Ом в затворах mosfet и использовать более мощные биполярные транзисторы, например семейства BD136 — BD140 соответствующих типов проводимости.
Упрощенный ШИМ 12V регулятор постоянного тока
Для регуляторов оборотов мотора постоянного тока можно использовать эту, показанную выше схему. Здесь нет необходимости использовать управляющие транзисторы. Mosfet могут быть подключены параллельно, добавив один 30-ти омный резистор к затвору каждого транзистора. Плату можете скачать в архиве.
Регулятор оборотов электродвигателя от 6 до 30 вольт 8 ампер
Выберите категорию:
Все
Запчасти для газовых котлов
» Запчасти универсальные для котлов (взаимозаменяемые)
» Запчасти для напольных котлов
» Запчасти Navien
» Запчасти Daewoo (ДЕУ)
» Запчасти Master Gas Seul
» Запчасти Ferroli
»» Ferroli Arena
»» Ferroli Fortuna
»» Ferroli Domina/Pro
»» Ferroli Divatech
»» Ferroli DOMIPROJECT
»» Ferroli Divatop
» Запчасти Beretta
» Запчасти для Bosch, Junkers
» Запчасти Arderia
» Запчасти BAXI
» Запчасти Аристон
» Запчасти VIESSMANN
» Запчасти VAILLANT
» Запчасти Балтгаз (BaltGaz), Нева Люкс (NevaLux)
» Immergas
» Запчасти Chaffoteaux
» Запчасти для газовых горелок
Запчасти для электрических котлов и водонагревателей
Запчасти для газовых колонок
Запчасти на газовые и электрические плиты
Отопительное оборудование
» Котлы газовые
»» Настенные газовые котлы
»»» Котлы газовые настенные Navien
»»»» Серия NAVIEN DELUXE
»»»» Серия NAVIEN DELUXE PLUS
»»»» Серия NAVIEN ATMO
»»» Котлы газовые настенные NEVA (Нева)
»»» Котлы газовые настенные Arderia
»»» Котлы газовые настенные Ferroli
»»» Котлы газовые настенные Daewoo
»»» Котлы газовые настенные Vaillant
»»» Котлы газовые настенные BAXI
»»»» Настенные
»»»» Настенные конденсационные
»»» Котлы газовые настенные OASIS
»»» Настенные газовые котлы Olical JLG (КНР)
»»» Котлы газовые Vissmann
»» Напольные газовые котлы
»»» Котлы напольные одноконтурные
»»» Котлы напольные двухконтурные
»»» Аппараты АОГВ
»» Парапетные котлы
»» Дымоходы, комплектующие дымоход для газовых котлов
» Газовые конвекторы
» Котлы электрические
» Котлы на отработке
» Котлы напольные твердотопливные
»» Котлы пиролизные
»» Твердотопливные котлы
»»» Твердотопливные стальные котлы
»»» Твердотопливные чугунные котлы
»»» Газогорелочные устройства – горелки
»»» Пеллетные горелки
»» Котлы пилетные
» Обогреватели на жидком топливе
» Расширительные баки для систем отопления
» Печи отопительные твёрдотопливные
» Группы безопасности
Товар со скидкой (Распродажа)
Бытовая сантехника
» Аксессуары для ванных комнат и туалетов
»» Аксессуары D-Lin
»» Аксессуары FRAP
» Мойки кухонные
» Полотенцесушители
» Смесители
»» Запасные части для смесителей
» Сифоны, комплектующие
» Комплектующие для спускных бачков
Водонагреватели
Газовые шланги, гибкая подводка для воды, шланги для полива
Дымоходы
» Одностенные Дымоходы
» Двухстенные дымоходы
Запорно-регулирующая арматура
» Газовые краны
» Вентили, латунные, чугунные.![]()
Производитель:
Все”WIKA Alexander Wiegand GmbH & Co.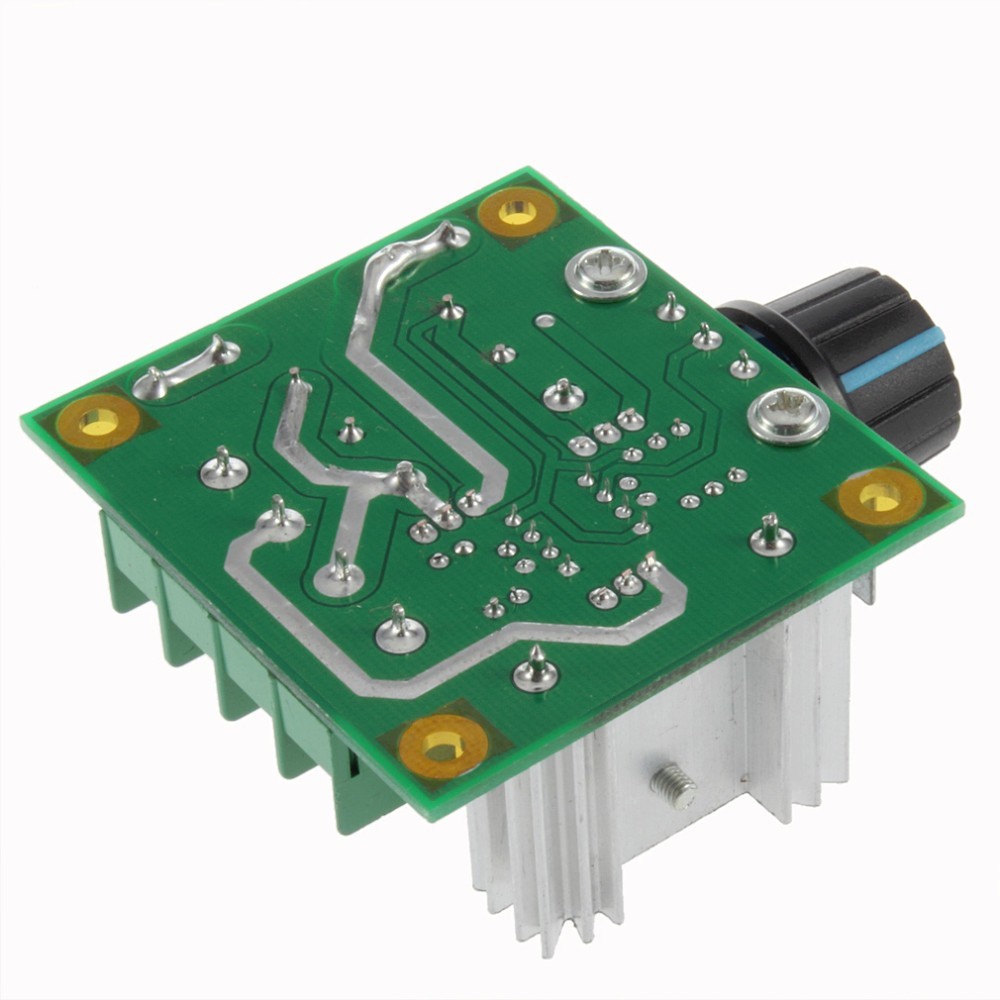 “, Германия.AEG (Китай)Altoen DaewooAXIS, РоссияBAXIBeretta, ИталияBONOMINI, ИталияBugatti, ИталияD-LIN (Китай)FerroliFIV, ИталияFRAP (Китай)GrundfosGrundfos, ДанияHaierHONEYWELLHONEYWELLHoneywell, Csech RepublicIMITItaltehnica ИталияJet-line Varmega, ИталияMeerPlastMORA (Чехия)OpenTherm (starclima) италияOstendorf, ГерманияRBM, ИталияRiello, ИталияSIT GRUP EUThermoWatt, ИталияTIM, КитайUnipump РоссияVaillantWatss ГерманияWilo ГерманияZilmetАнипласт, РоссияБалтГазВенгрияГерманияГреция HalcorЗАВОД ТЕПЛОВОГО ОБОРУДОВАНИЯ “ПЕЛЛЕТРОН” Дамир тел. 8-912-292-23-59 +WhatsAppИталияКитайКореяЛуч (Таганрог)Мимакс Таганрог (8634) 38-16-13, 38-02-80 [email protected], Ип СупруновНева (Балтгаз)НидерландыОООПолитэк, РоссияПольшаРБМ, ТулаРоссияРоссия, г. ЭнгельсРоссия, г.ТаганрогРоссия, Московская областьРоссия, Челябинск.РязаньРязань ООО”РОСТ”Санкт-Петербург, РоссияСАНПОЛИМЕР РоссияСанполимер, РоссияТурцияТурцияУклад, ПсковФинляндияФранцияЧистополь, РоссияШвеция SWEPЭван (Россия)Япония
“, Германия.AEG (Китай)Altoen DaewooAXIS, РоссияBAXIBeretta, ИталияBONOMINI, ИталияBugatti, ИталияD-LIN (Китай)FerroliFIV, ИталияFRAP (Китай)GrundfosGrundfos, ДанияHaierHONEYWELLHONEYWELLHoneywell, Csech RepublicIMITItaltehnica ИталияJet-line Varmega, ИталияMeerPlastMORA (Чехия)OpenTherm (starclima) италияOstendorf, ГерманияRBM, ИталияRiello, ИталияSIT GRUP EUThermoWatt, ИталияTIM, КитайUnipump РоссияVaillantWatss ГерманияWilo ГерманияZilmetАнипласт, РоссияБалтГазВенгрияГерманияГреция HalcorЗАВОД ТЕПЛОВОГО ОБОРУДОВАНИЯ “ПЕЛЛЕТРОН” Дамир тел. 8-912-292-23-59 +WhatsAppИталияКитайКореяЛуч (Таганрог)Мимакс Таганрог (8634) 38-16-13, 38-02-80 [email protected], Ип СупруновНева (Балтгаз)НидерландыОООПолитэк, РоссияПольшаРБМ, ТулаРоссияРоссия, г. ЭнгельсРоссия, г.ТаганрогРоссия, Московская областьРоссия, Челябинск.РязаньРязань ООО”РОСТ”Санкт-Петербург, РоссияСАНПОЛИМЕР РоссияСанполимер, РоссияТурцияТурцияУклад, ПсковФинляндияФранцияЧистополь, РоссияШвеция SWEPЭван (Россия)Япония
Регулятор оборотов электродвигателя коллекторного типа на ШИМ
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто). А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
ШИМ-регуляторы, речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
Рис.1.
На рис.1 приведена схема одного из таких ШИМ-регуляторов. Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2.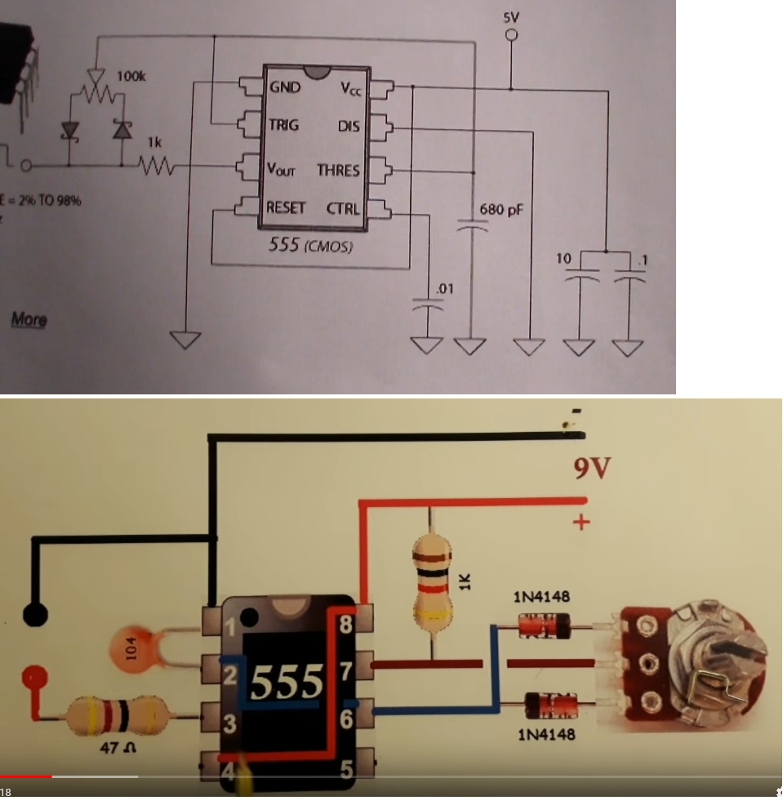 Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Рис.2.
Схема ШИМ регуляторов на рис.2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
Рис.3.
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор выполнен на интегральном таймере NE555. Задающий генератор имеет частоту повторения 500 Гц. Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555 подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.4., поможет решить эту проблему.
Рис.4.
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1.1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя – R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б – КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
Подготовлено по материалам статьи: А.В. Тимошенко, Радіоаматор №4, 2008г.
| |||||
| |||||
| |||||
| |||||
| |||||
| |||||
| |||||

Что такое шим регулятор оборотов. ШИМ-регулятор. Широтно-импульсная модуляция. Схема. Двухканальный регулятор для мотора
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто). А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
ШИМ-регуляторы , речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.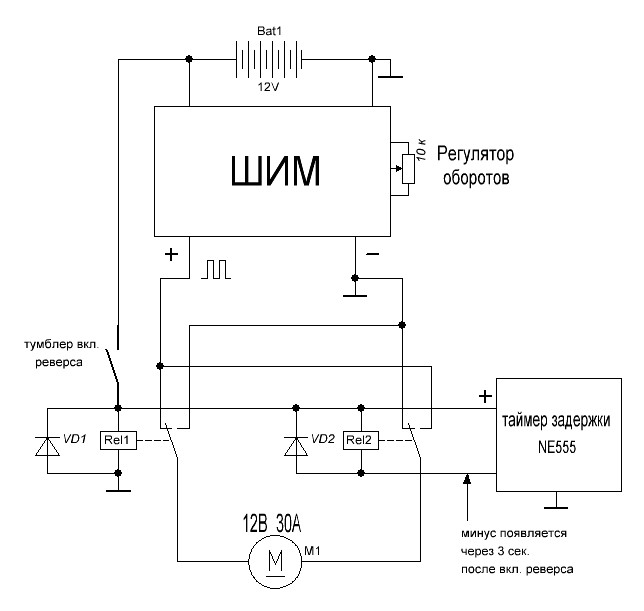
На рис.1 приведена схема одного из таких ШИМ-регуляторов . Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Схема ШИМ регуляторов на рис.2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор выполнен на интегральном таймере NE555 . Задающий генератор имеет частоту повторения 500 Гц. Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555 подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.4., поможет решить эту проблему.
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1.1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя – R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.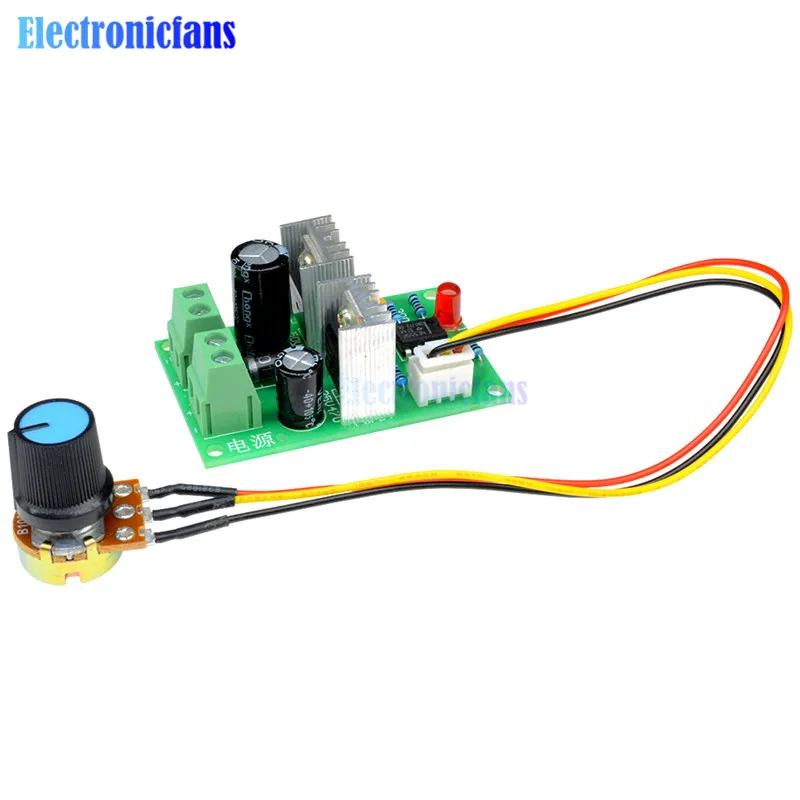 4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б – КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
Сам принцип широтно-импульсного моделирования (ШИМ) известен уже давно, но применяться в различных схемах он стал относительно недавно. Он является ключевым моментом для работы многих устройств, используемых в различных сферах: источники бесперебойного питания различной мощности, частотные преобразователи, системы регулирования напряжения, тока или оборотов, лабораторные преобразователи частоты и т.д. Он прекрасно показал себя в автомобилестроении и на производстве в качестве элемента для управления работой как сервисных, так и мощных электродвигателей. ШИМ-регулятор хорошо зарекомендовал себя при работе в различных цепях.
Давайте рассмотрим несколько практических примеров, показывающих, как можно регулировать скорость вращения электродвигателя с помощью электронных схем, в состав которых входит ШИМ-регулятор. Предположим, что вам необходимо изменить обороты электродвигателя в системе отопления салона вашего автомобиля. Достаточно полезное усовершенствование, не правда ли? Особенно в межсезонье, когда хочется регулировать температуру в салоне плавно.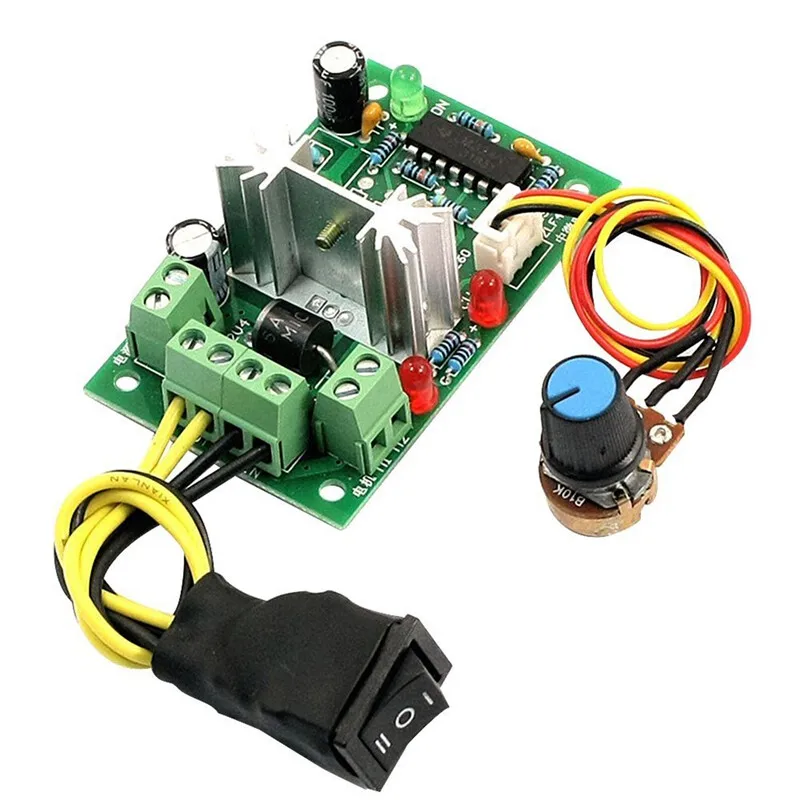 Двигатель постоянного тока, установленный в этой системе, позволяет изменять обороты, но необходимо повлиять на его ЭДС. С помощью современных электронных элементов эту задачу легко выполнить. Для этого в двигателя включается мощный полевой транзистор. Управляет им, как вы уже догадались, ШИМ- С его помощью можно менять обороты электродвигателя в широких пределах.
Двигатель постоянного тока, установленный в этой системе, позволяет изменять обороты, но необходимо повлиять на его ЭДС. С помощью современных электронных элементов эту задачу легко выполнить. Для этого в двигателя включается мощный полевой транзистор. Управляет им, как вы уже догадались, ШИМ- С его помощью можно менять обороты электродвигателя в широких пределах.
Каким образом работает ШИМ-регулятор в цепях В этом случае используется несколько иная схема регулирования, но принцип работы остается тем же. В качестве примера можно рассмотреть работу частотного преобразователя. Такие устройства широко применяются на производстве для регулирования скорости двигателей. Для начала трехфазное напряжение выпрямляется с помощью моста Ларионова и частично сглаживается. И только после этого подается на мощную двуполярную сборку или модуль на базе полевых транзисторов. Управляет же им собранный на базе микроконтроллера. Он и формирует контрольные импульсы, их ширину и частоту, необходимую для формирования определенной скорости электродвигателя.
К сожалению, помимо хороших эксплуатационных характеристик, в схемах, где используется ШИМ-регулятор обычно появляются сильные помехи в силовой цепи. Это связано с наличием индуктивности в обмотках электродвигателей и самой линии. Борются с этим самыми разнообразными схемными решениями: устанавливают мощные сетевые фильтры в цепях переменного тока или ставят обратный диод параллельно двигателю в цепях постоянного электропитания.
Такие схемы отличаются достаточно высокой надежностью в работе и являются инновационными в сфере управления электроприводами различной мощности. Они достаточно компактны и хорошо управляемы. Последние модификации таких устройств широко применяются на производстве.
ШИМ или PWM (широтно-импульсная модуляция, по-английски pulse-width modulation) – это способ управления подачей мощности к нагрузке. Управление заключается в изменении длительности импульса при постоянной частоте следования импульсов.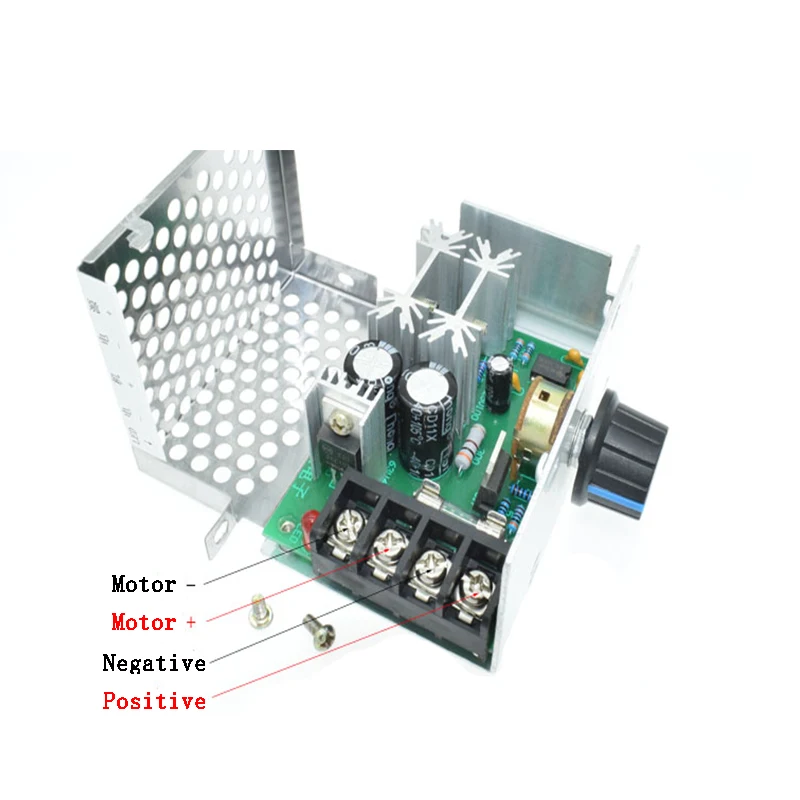 Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной.
Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной.
Применение широтно-импульсной модуляции позволяет повысить КПД электрических преобразователей, особенно это касается импульсных преобразователей, составляющих сегодня основу вторичных источников питания различных электронных аппаратов. Обратноходовые и прямоходовые однотактные, двухтактные и полумостовые, а также мостовые импульсные преобразователи управляются сегодня с участием ШИМ, касается это и резонансных преобразователей.
Широтно-импульсная модуляция позволяет регулировать яркость подсветки жидкокристаллических дисплеев сотовых телефонов, смартфонов, ноутбуков. ШИМ реализована в , в автомобильных инверторах, в зарядных устройствах и т. д. Любое зарядное устройство сегодня использует при своей работе ШИМ.
В качестве коммутационных элементов, в современных высокочастотных преобразователях, применяются биполярные и полевые транзисторы, работающие в ключевом режиме. Это значит, что часть периода транзистор полностью открыт, а часть периода – полностью закрыт.
И так как в переходных состояниях, длящихся лишь десятки наносекунд, выделяемая на ключе мощность мала, по сравнению с коммутируемой мощностью, то средняя мощность, выделяемая в виде тепла на ключе, в итоге оказывается незначительной. При этом в замкнутом состоянии сопротивление транзистора как ключа очень невелико, и падение на нем напряжения приближается к нулю.
В разомкнутом же состоянии проводимость транзистора близка к нулю, и ток через него практически не течет. Это позволяет создавать компактные преобразователи с высокой эффективностью, то есть с небольшими тепловыми потерями. А резонансные преобразователи с переключением в нуле тока ZCS (zero-current-switching) позволяют свести эти потери к минимуму.
В ШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора, например, подается треугольный или пилообразный сигнал, а на неинвертирующий – модулирующий непрерывный сигнал.
Выходные импульсы получаются , частота их следования равна частоте пилы (или сигнала треугольной формы), а длительность положительной части импульса связана с временем, в течение которого уровень модулирующего постоянного сигнала, подаваемого на неинвертирующий вход компаратора, оказывается выше уровня сигнала пилы, который подается на инвертирующий вход. Когда напряжение пилы выше модулирующего сигнала – на выходе будет отрицательная часть импульса.
Если же пила подается на неинвертирующий вход компаратора, а модулирующий сигнал – на инвертирующий, то выходные импульсы прямоугольной формы будут иметь положительное значение тогда, когда напряжение пилы выше значения модулирующего сигнала, поданного на инвертирующий вход, а отрицательное – когда напряжение пилы ниже сигнала модулирующего. Пример аналогового формирования ШИМ – микросхема TL494, широко применяющаяся сегодня при построении импульсных блоков питания.
Цифровая ШИМ используются в двоичной цифровой технике. Выходные импульсы также принимают только одно из двух значений (включено или выключено), и средний уровень на выходе приближается к желаемому. Здесь пилообразный сигнал получается благодаря использованию N-битного счетчика.
Цифровые устройства с ШИМ работают также на постоянной частоте, обязательно превосходящей время реакции управляемого устройства, этот подход называется передискретизацией. Между фронтами тактовых импульсов, выход цифрового ШИМ остается стабильным, или на высоком, или на низком уровне, в зависимости от текущего состояния выхода цифрового компаратора, который сравнивает уровни сигналов на счетчике и приближаемый цифровой.
Выход тактуется как последовательность импульсов с состояниями 1 и 0, каждый такт состояние может сменяться или не сменяться на противоположное. Частота импульсов пропорциональна уровню приближаемого сигнала, а единицы, следующие друг за другом могут сформировать один более широкий, более продолжительный импульс.![]()
Получаемые импульсы переменной ширины будут кратны периоду тактования, а частота будет равна 1/2NT, где T – период тактования, N – количество тактов. Здесь достижима более низкая частота по отношению к частоте тактования. Описанная схема цифровой генерации – это однобитная или двухуровневая ШИМ, импульсно-кодированная модуляция ИКМ.
Эта двухуровневая импульсно-кодированная модуляция представляет собой по сути серию импульсов с частотой 1/T, и шириной Т или 0. Для усреднения за больший промежуток времени применяется передискретизация. Высокого качества ШИМ позволяет достичь однобитная импульсно-плотностная модуляция (pulse-density-modulation), называемая также импульсно-частотной модуляцией.
При цифровой широтно-импульсной модуляции прямоугольные подимпульсы, которыми оказывается заполнен период, могут приходиться на любое место в периоде, и тогда на среднем за период значении сигнала сказывается только их количество. Так, если разделить период на 8 частей, то комбинации импульсов 11001100, 11110000, 11000101, 10101010 и т. д. дадут одинаковое среднее значение за период, тем не менее, отдельно стоящие единицы утяжеляют режим работы ключевого транзистора.
Корифеи электроники, повествуя о ШИМ, приводят такую аналогию с механикой. Если при помощи двигателя вращать тяжелый маховик, то поскольку двигатель может быть либо включен, либо выключен, то и маховик будет либо раскручиваться и продолжать вращаться, либо станет останавливаться из-за трения, когда двигатель выключен.
Но если двигатель включать на несколько секунд в минуту, то вращение маховика будет поддерживаться, благодаря инерции, на некоторой скорости. И чем дольше продолжительность включения двигателя, тем до более высокой скорости раскрутится маховик. Так и с ШИМ, на выход приходит сигнал включений и выключений (0 и 1), и в результате достигается среднее значение. Проинтегрировав напряжение импульсов по времени, получим площадь под импульсами, и эффект на рабочем органе будет тождественен работе при среднем значении напряжения.
Так работают преобразователи, где переключения происходят тысячи раз в секунду, и частоты достигают единиц мегагерц. Широко распространены специальные ШИМ-контроллеры, служащие для управления балластами энергосберегающих ламп, блоками питания, и т. д.
Отношение полной длительности периода импульса ко времени включения (положительной части импульса) называется скважностью импульса. Так, если время включения составляет 10 мкс, а период длится 100 мкс, то при частоте в 10 кГц, скважность будет равна 10, и пишут, что S = 10. Величина обратная скважности называется коэффициентом заполнения импульса, по-английски Duty cycle, или сокращенно DC.
Так, для приведенного примера DC = 0.1, поскольку 10/100 = 0.1. При широтно-импульсной модуляции, регулируя скважность импульса, то есть варьируя DC, добиваются требуемого среднего значения на выходе электронного или другого электротехнического устройства, например двигателя.
При работе с множеством различных технологий часто стоит вопрос: как управлять мощностью, которая доступна? Что делать, если её необходимо понизить или повысить? Ответом на эти вопросы служит ШИМ-регулятор. Что он собой представляет? Где применяется? И как самому собрать такой прибор?
Что такое широтно-импульсная модуляция?
Без выяснения значения этого термина продолжать не имеет смысла. Итак, широтно-импульсная модуляция — это процесс управления мощностью, которая подводится к нагрузке, осуществляемая путём видоизменения скважности импульсов, которая делается при постоянной частоте. Существует несколько типов широтно-импульсной модуляции:
1. Аналоговый.
2. Цифровой.
3. Двоичный (двухуровневый).
4. Троичный (трехуровневый).
Что такое ШИМ-регулятор?
Теперь, когда мы знаем, что такое широтно-импульсная модуляция, можно поговорить и о главной теме статьи. Используется ШИМ-регулятор для того, чтобы регулировать напряжение питания и для недопущения мощных инерционных нагрузок в авто- и мототехнике.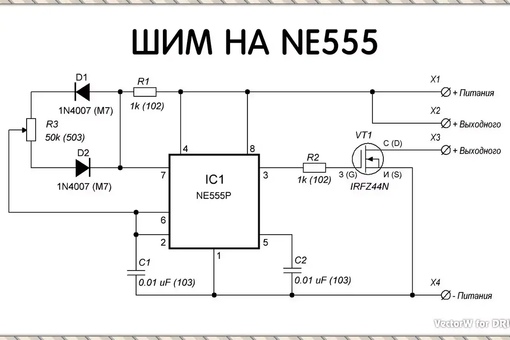 Это может звучать слишком сложно и лучше всего пояснить на примере. Допустим, необходимо сделать, чтобы лампы освещения салона меняли свою яркость не сразу, а постепенно. Это же относится к габаритным огням, автомобильным фарам или вентиляторам. Воплотить такое желание можно путём установки транзисторного регулятора напряжения (параметрический или компенсационный). Но при большом токе на нём будет выделяться чрезвычайно большая мощность и потребуется установка дополнительных больших радиаторов или дополнение в виде системы принудительного охлаждения с использованием маленького вентилятора, снятого с компьютерного устройства. Как видите, данный путь влечёт за собой много последствий, которые необходимо будет преодолеть.
Это может звучать слишком сложно и лучше всего пояснить на примере. Допустим, необходимо сделать, чтобы лампы освещения салона меняли свою яркость не сразу, а постепенно. Это же относится к габаритным огням, автомобильным фарам или вентиляторам. Воплотить такое желание можно путём установки транзисторного регулятора напряжения (параметрический или компенсационный). Но при большом токе на нём будет выделяться чрезвычайно большая мощность и потребуется установка дополнительных больших радиаторов или дополнение в виде системы принудительного охлаждения с использованием маленького вентилятора, снятого с компьютерного устройства. Как видите, данный путь влечёт за собой много последствий, которые необходимо будет преодолеть.
Настоящим спасением из данной ситуации стал ШИМ-регулятор, который работает на мощных полевых силовых транзисторах. Они могут коммутировать большие токи (которые достигают 160 Ампер) при напряжении всего в 12-15В на затворе. Следует отметить, что сопротивление у открытого транзистора довольное мало, и благодаря этому можно заметно снизить уровень рассеиваемой мощности. Чтобы создать свой собственный ШИМ-регулятор, понадобится схема управления, которая сможет обеспечить разность напряжения между истоком и затвором в границах 12-15В. Если этого не получится достичь, то сопротивление канала будет сильно увеличиваться и значительно возрастёт рассеиваемая мощность. А это, в свою очередь, может привести к тому, что транзистор перегреется и выйдет из строя.
Выпускается целый ряд микросхем для ШИМ-регуляторов, которые смогут выдержать повышение входного напряжения до уровня 25-30В, при том, что питание будет всего 7-14В. Это позволит включать выходной транзистор в схеме вместе с общим стоком. Это, в свою очередь, необходимо для подключения нагрузки с общим минусом. В качестве примеров можно привести такие образцы: L9610, L9611, U6080B … U6084B. Большинство нагрузок не потребляет ток больше 10 ампер, поэтому они не могут вызвать просадку напряжения. И как результат – использовать можно и простые схемы без доработки в виде дополнительного узла, который будет повышать напряжение. И именно такие образцы ШИМ-регуляторов и будут рассмотрены в статье. Они могут быть построены на основе несимметрического или ждущего мультивибратора. Стоит поговорить про ШИМ-регулятор оборотов двигателя. Об этом далее.
И как результат – использовать можно и простые схемы без доработки в виде дополнительного узла, который будет повышать напряжение. И именно такие образцы ШИМ-регуляторов и будут рассмотрены в статье. Они могут быть построены на основе несимметрического или ждущего мультивибратора. Стоит поговорить про ШИМ-регулятор оборотов двигателя. Об этом далее.
Схема №1
Эта схема ШИМ-регулятора собиралась на инверторах КМОП-микросхемы. Она является генератором прямоугольных импульсов, который действует на 2-х логических элементах. Благодаря диодам здесь отдельно изменяется постоянная времени разряда и заряда частотозадающего конденсатора. Это позволяет менять скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке. В данной схеме возможно использование любых инвертирующих КМОП-элементов, а также ИЛИ-НЕ и И. В качестве примеров подойдут К176ПУ2, К561ЛН1, К561ЛА7, К561ЛЕ5. Можно использовать и другие виды, но перед этим придётся хорошо подумать о том, как правильно сгруппировать их входы, чтобы они могли выполнять возложенный функционал. Преимущества схемы – доступность и простота элементов. Недостатки – сложность (практически невозможность) доработки и несовершенство относительно изменения диапазона выходного напряжения.
Схема №2
Обладает лучшими характеристиками, нежели первый образец, но сложнее в выполнении. Может регулировать эффективное напряжение на нагрузке в диапазоне 0-12В, до которого изменяется с начального значения 8-12В. Максимальный ток зависит от типа полевого транзистора и может достигать значительных значений. Учитывая, что выходное напряжение является пропорциональным входному управляющему, данную схему можно использовать как часть системы регулирования (для поддержки уровня температуры).
Причины распространения
Чем привлекает автолюбителей ШИМ-регулятор? Следует отметить стремление к увеличению КПД, когда проводится построение вторичных для электронной аппаратуры. Благодаря данному свойству можно данную технологию найти также при изготовлении компьютерных мониторов, дисплеев в телефонах, ноутбуках, планшетах и подобной техники, а не только в автомобилях. Также следует отметить значительную дешевизну, которой отличается данная технология при своём использовании. Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
Благодаря данному свойству можно данную технологию найти также при изготовлении компьютерных мониторов, дисплеев в телефонах, ноутбуках, планшетах и подобной техники, а не только в автомобилях. Также следует отметить значительную дешевизну, которой отличается данная технология при своём использовании. Также, если решите не покупать, а собирать ШИМ-регулятор собственноручно, то можно сэкономить деньги при усовершенствовании своего собственного автомобиля.
Заключение
Что ж, вы теперь знаете, что собой представляет ШИМ-регулятор мощности, как он работает, и даже можете сами собрать подобные устройства. Поэтому, если есть желание поэкспериментировать с возможностями своего автомобиля, можно сказать по этому поводу только одно – делайте. Причем можете не просто воспользоваться представленными здесь схемами, но и существенно доработать их при наличии соответствующих знаний и опыта. Но даже если всё не получится с первого раза, то вы сможете получить очень ценную вещь – опыт. Кто знает, где он может в следующий раз пригодиться и насколько важным будет его наличие.
Классическая схема широтно-импульсного модуля управления 12-ти вольтовой нагрузкой, схема собрана на основе таймера 555 и полевого транзистора.
Для небольшого настольного станка с 12 В питанием, что купил недавно на Али, понадобился модуль регулятора скорости вращения двигателя. В общем решил сделать свою собственную схему, так как снова заказывать этот блок не хотелось, до и дорого будет готовый брать.
Схема ШИМ контроллера 12В
Поразмыслив пришёл к выводу, что нужна схема для регулятора скорости мотора постоянного тока в виде ШИМ-контроллера. Он может сделать гораздо больше, чем просто изменять скорость двигателя. Данная схема имеет выход 12 вольт с различной скважностью и её можно использовать в качестве многих других целей:
- Регулятор скорости мотора;
- Светодиодный диммер подсветки;
- Регулятор тепла для нагреваемого провода;
- Регулятор напряжения для электролитического травления и т. д.
 д.
д.Все запчасти могут куплены за копейки, или выпаяны со старых плат с деталями. Далее список радиодеталей для сборки схемы:
Детали для регулятора
- 1 х 0,01 мкФ керамический конденсатор
- 1 х 0.1 мкФ керамический конденсатор
- 2 х 1N4001 выпрямительные диоды
- 1 х 1N4004 выпрямительный диод
- 1 х IRF530 100 В 14 А полевой транзистор
- 1 х 100 Ом резистор
- 1 х 1 кОм резистор
- 1 х NE555 таймер
- 1 x 8-контактный разъем под м/с
- 1 х 100 кОм потенциометр
- 1 х 70 х 100 односторонняя ПП
На этой картинке показана печатная монтажная плата для сборки ШИМ регулятора, но вы можете разработать свой вариант. При пайке обратите внимание на расположение таймера 555. Все остальные детали вполне понятны куда чего.
Есть 3 перемычки на плате: от GND к С1, с контакта 7 555 на D1 и GND к IRF530.
Также на плате есть сквозное отверстие под транзистор IRF530 – это на теплоотвод.
При подключении мотора, нужно проверить направление вращения двигателя, прежде чем переходить к окончательной сборке, хотя электромотор будет исправно работать в любом направлении. Ну вот и вся конструкция, проверенная и 100% рабочая – успехов вам в её самостоятельной сборке!
Цифровой ШИМ регулятор оборотов коллекторного двигателя.
CCM5D Digital DC Motor Speed Controller/PWM Stepless Speed Control Switch Black Цена $14.47Товар получен бесплатно для обзора
Еще один обзор на тему всяких вещей для самоделок. На этот раз я расскажу о цифровом регуляторе оборотов. Вещица по своему интересная, но хотелось большего.
Кому интересно, читайте дальше 🙂
Имея в хозяйстве некоторые низковольтные устройства типа небольшой шлифовальной машинки и т.п. я захотел немного увеличить их функциональный и эстетический вид. Правда это не получилось, хотя я надеюсь все таки добиться своего, возможно в другой раз, на за саму вещицу расскажу сегодня.![]()
Производитель данного регулятора фирма Maitech, вернее именно это название часто встречается на всяких платках и блочках для самоделок, хотя сайт этой фирмы почему то мне не попался.
Из-за того, что я не сделал в итоге то, что хотел, обзор будет короче обычного, но начну как всегда с того, как это продается и присылается.
В конверте лежал обычный пакетик с защелкой.
В комплекте только регулятор с переменным резистором и кнопкой, жесткой упаковки и инструкции нет, но доехало все целым и без повреждений.
Сзади присутствует наклейка, заменяющая инструкцию. В принципе большего для такого устройства и не требуется.
Указан рабочий диапазон напряжения 6-30 Вольт и максимальный ток в 8 Ампер.
Внешний вид весьма неплох, темное “стекло”, темно-серый пластик корпуса, в выключенном состоянии кажется вообще черным. По внешнему виду зачет, придраться не к чему. Спереди была приклеена транспортировочная пленка.
Установочные размеры устройства:
Длина 72мм ( минимальное отверстие в корпусе 75мм), ширина 40мм, глубина без учета передней панели 23мм (с передней панелью 24мм).
Размеры передней панели:
Длина 42.5,мм ширина 80мм
Переменный резистор идет в комплекте с ручкой, ручка конечно грубовата, но для применения вполне сойдет.
Сопротивление резистора 100КОм, зависимость регулировки – линейная.
Как потом выяснилось, 100КОм сопротивление дает глюк. При питании от импульсного БП невозможно выставить стабильные показания, сказывается наводка на провода к переменному резистору, из-за чего показания скачут +\- 2 знака, но ладно бы скакали, вместе с этим скачут обороты двигателя.
Сопротивление резистора высокое, ток маленький и провода собирают все помехи вокруг.
При питании от линейного БП такая проблема отсутствует полностью.
Длина проводов к резистору и кнопке около 180мм.
Кнопка, ну тут ничего особенного. Контакты нормально открытые, установочный диаметр 16мм, длина 24мм, подсветки нет.![]()
Кнопка выключает двигатель.
Т.е. при подаче питания индикатор включается, двигатель запускается, нажатие на кнопку его выключает, второе нажатие включает опять.
Когда двигатель выключен то индикатор так же не светится.
Под крышкой находится плата устройства.
На клеммы выведены контакты питания и подключения двигателя.
Плюсовые контакты разъема соединены вместе, силовой ключ коммутирует минусовой провод двигателя.
Подключение переменного резистора и кнопки разъемное.
На вид все аккуратно. Выводы конденсатора немного кривоваты, но я думаю что это можно простить 🙂
Индикатор довольно большой, высота цифры 14мм.
Размеры платы 69х37мм.
Плата собрана аккуратно, около контактов индикатора присутствуют следы флюса, но в целом плата чистая.
На плате присутствуют: диод для защиты от переполюсовки, стабилизатор 5 Вольт, микроконтроллер, конденсатор 470мкФ 35 Вольт, силовые элементы под небольшим радиатором.
Так же видны места под установку дополнительных разъемов, назначение их непонятно.
Набросал небольшую блок-схему, просто для примерного понимания что и как коммутируется и как подключается. Переменный резистор так и включен одной ногой к 5 Вольт, второй на землю. потому его можно спокойно заменить на более низкий номинал. На схеме нет подключений к нераспаянному разъему.
В устройстве использован микроконтроллер 8s003f3p6 производства STMicroelectronics.Насколько мне известно, этот микроконтроллер используется в довольно большом количестве разных устройств, например ампервольтметрах.
Стабилизатор питания 78M05, при работе на максимальном входном напряжении нагревается, но не очень сильно.
Часть тепла от силовых элементов отводится на медные полигоны платы, слева видно большое количество переходов с одной стороны платы на другую, что помогает отводить тепло.
Так же тепло отводится при помощи небольшого радиатора, который прижат к силовым элементам сверху.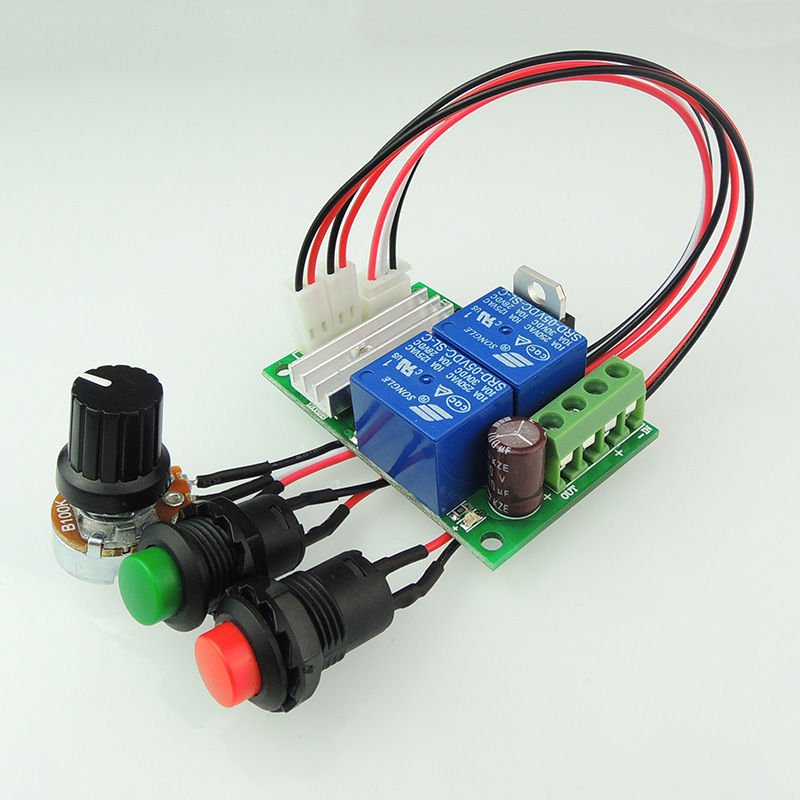 Такое размещение радиатора кажется мне несколько сомнительным, так как тепло отводится через пластмассу корпуса и такой радиатор помогает несильно.
Такое размещение радиатора кажется мне несколько сомнительным, так как тепло отводится через пластмассу корпуса и такой радиатор помогает несильно.
Паста между силовыми элементами и радиатором отсутствует, рекомендую снять радиатор и промазать пастой, хоть немного но станет лучше.
В силовой части применен транзистор IRLR7843, сопротивление канала 3.3мОм, максимальный ток 161 Ампер, но максимальное напряжение всего 30 Вольт, потому я бы рекомендовал ограничивать входное на уровне 25-27 Вольт. При работе на околомаксимальных токах присутствует небольшой нагрев.
Так же рядом расположен диод, который гасит выбросы тока от самоиндукции двигателя.
Здесь применен STPS1045 10 Ампер, 45 Вольт. К диоду вопросов нет.
Первое включение. Так получилось, что испытания я проводил еще до снятия защитной пленки, потому на этих фото она еще есть.
Индикатор контрастный, в меру яркий, читается отлично.
Сначала я решил попробовать на мелких нагрузках и получил первое разочарование.
Нет, претензий к производителю и магазину у меня нет, просто я надеялся, что в таком относительно недешевом устройстве будет присутствовать стабилизация оборотов двигателя.
Увы, это просто регулируемый ШИМ, на индикаторе отображается % заполнения от 0 до 100%.
Мелкого двигателя регулятор даже не заметил, дня него это совсем смешной ток нагрузки 🙂
Внимательные читатели наверняка обратили внимание на сечение проводов, которыми я подключил питание к регулятору.
Да, дальше я решил подойти к вопросу более глобально и подключил более мощный двигатель.
Он конечно заметно мощнее регулятора, но на холостом ходу его ток около 5 Ампер, что позволило проверить регулятор на режимах более приближенных к максимальным.
Регулятор вел себя отлично, кстати я забыл указать что при включении регулятор плавно увеличивает заполнение ШИМ от нуля до установленного значения обеспечивая плавный разгон, на индикаторе при этом сразу показывается установленное значение, а не как на частотных приводах, где отображается реальное текущее.
Регулятор не вышел из строя, немного нагрелся, но не критично.
Так как регулятор импульсный, то я решил просто ради интереса потыкаться осциллографом и посмотреть что происходит на затворе силового транзистора в разных режимах.
Частота работы ШИМа около 15 КГц и не меняется в процессе работы. Двигатель заводится примерно при 10% заполнения.
Изначально я планировал поставить регулятор в свой старый (скорее уже древний) блок питания для мелкого электроинструмента (о нем как нибудь в другой раз). по идее он должен был стать вместо передней панели, а на задней должен был расположиться регулятор оборотов, кнопку ставить не планировал (благо при включении устройство сразу переходит в режим – включено).
Должно было получиться красиво и аккуратно.
Но дальше меня ждало некоторое разочарование.
1. Индикатор хоть и был немного меньше по габаритам чем вставка передней панели, но хуже было то, что он не влазил по глубине упираясь в стойки для соединения половинок корпуса.
и если пластмассу корпуса индикатора можно было срезать, то не стал бы все равно, так как дальше мешала плата регулятора.
2. Но даже если бы первый вопрос я бы решил, то была вторая проблема, я совсем забыл как у меня сделан блок питания. Дело в том, что регулятор рвет минус питания, а у меня дальше по схеме стоит реле реверса, включения и принудительной остановки двигателя, схема управления всем этим. И с их переделкой оказалось все куда сложнее 🙁
Если бы регулятор был со стабилизацией оборотов, то я бы все таки заморочился и переделал схему управления и реверса, либо переделал регулятор под коммутацию + питания. А так можно и переделаю, но уже без энтузиазма и теперь не знаю когда.
Может кому интересно, фото внутренностей моего БП, собирался он лет так около 13-15 назад, почти все время работал без проблем, один раз пришлось заменить реле.
Резюме.
Плюсы
Устройство полностью работоспособно.
Аккуратный внешний вид.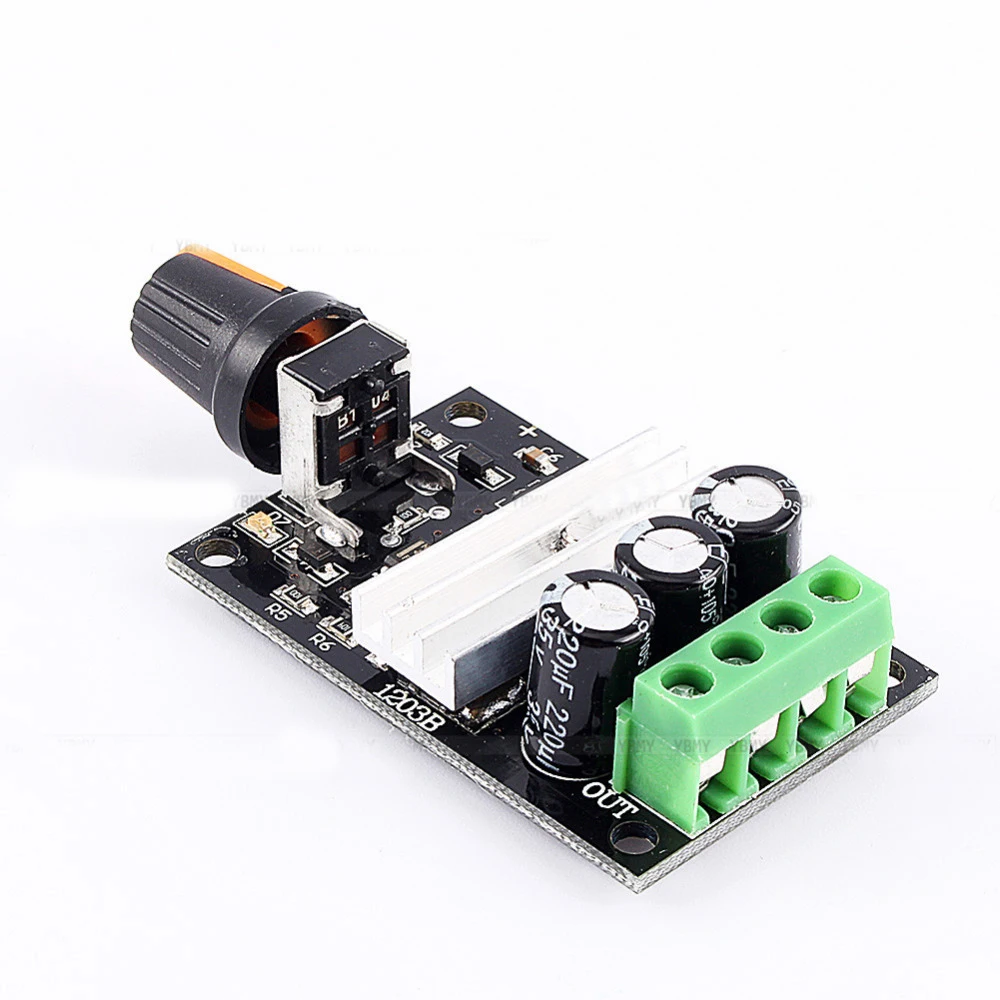
Качественная сборка
В комплект входит все необходимое.
Минусы
Некорректная работа от импульсных блоков питания.
Силовой транзистор без запаса по напряжению
При таком скромном функционале завышена цена (но здесь все относительно).
Мое мнение. Если закрыть глаза на цену устройства, то само по себе оно вполне неплохое, и выглядит аккуратно и работает нормально. Да, присутствует проблема не очень хорошей помехозащищенности, думаю что решить ее несложно, но немного расстраивает. Кроме того рекомендую не превышать входное напряжение выше 25-27 Вольт.
Больше расстраивает то, что я довольно много смотрел варианты всяких готовых регуляторов, но нигде не предлагают решение со стабилизацией оборотов. Возможно кто то спросит, зачем мне это. Объясню, как то попала в руки шлифовальная машинка со стабилизацией, работать гораздо приятнее чем обычной.
На этом все, надеюсь что было интересно 🙂
Как сделать ШИМ-контроллер скорости двигателя постоянного тока с использованием таймера 555 IC
В этом уроке мы узнаем, как создать ШИМ-контроллер скорости двигателя постоянного тока с использованием микросхемы таймера 555. Мы подробно рассмотрим, как работает схема генератора ШИМ с таймером 555, как использовать ее для управления скоростью двигателя постоянного тока и как сделать для нее специальную печатную плату.
Обзор
Мы можем контролировать скорость двигателя постоянного тока, контролируя входное напряжение двигателя. Для этого мы можем использовать ШИМ или широтно-импульсную модуляцию.
ШИМ-регулятор скорости двигателя постоянного тока
PWM – это метод, с помощью которого мы можем генерировать переменное напряжение путем включения и выключения питания, которое подается на электронное устройство с высокой скоростью. Среднее напряжение зависит от рабочего цикла сигнала или количества времени, в течение которого сигнал находится в состоянии ВКЛ, по сравнению с количеством времени, в течение которого сигнал отключен за один период времени.
Среднее напряжение зависит от рабочего цикла сигнала или количества времени, в течение которого сигнал находится в состоянии ВКЛ, по сравнению с количеством времени, в течение которого сигнал отключен за один период времени.
Цепь генератора ШИМ таймера 555
Таймер 555 способен генерировать сигнал ШИМ при настройке в нестабильный режим.Если вы не знакомы с таймером 555, вы можете проверить мое предыдущее руководство, где я подробно объяснил, что находится внутри и как работает микросхема таймера 555.
Вот базовая схема таймера 555, работающего в нестабильном режиме, и мы можем заметить, что выходной сигнал ВЫСОКИЙ, когда конденсатор C1 заряжается через резисторы R1 и R2.
С другой стороны, выход IC имеет низкий уровень, когда конденсатор C1 разряжается, но только через резистор R2.Таким образом, мы можем заметить, что если мы изменим значения любого из этих трех компонентов, мы получим разные времена включения и выключения или другой рабочий цикл выходного сигнала прямоугольной формы. Простой и мгновенный способ сделать это – заменить резистор R2 на потенциометр и дополнительно добавить в схему два диода.
В этой конфигурации время включения будет зависеть от резистора R1, левой стороны потенциометра и конденсатора C1, а время выключения будет зависеть от конденсатора C1 и правой стороны потенциометра.Мы также можем заметить, что в этой конфигурации период одного цикла, то есть частота, всегда будет одинаковой, потому что полное сопротивление во время зарядки и разрядки останется неизменным.
Обычно сопротивление R1 намного меньше, чем сопротивление потенциометра, например 1 кОм по сравнению с 100 кОм потенциометра. Таким образом, мы на 99% контролируем сопротивление заряда и разряда в цепи. Управляющий вывод таймера 555 не используется, но он подключен к конденсатору емкостью 100 нФ, чтобы устранить любые внешние помехи от этого вывода.Сброс, контакт номер 4, активен на низком уровне, поэтому он подключен к VCC, чтобы предотвратить любой нежелательный сброс выхода.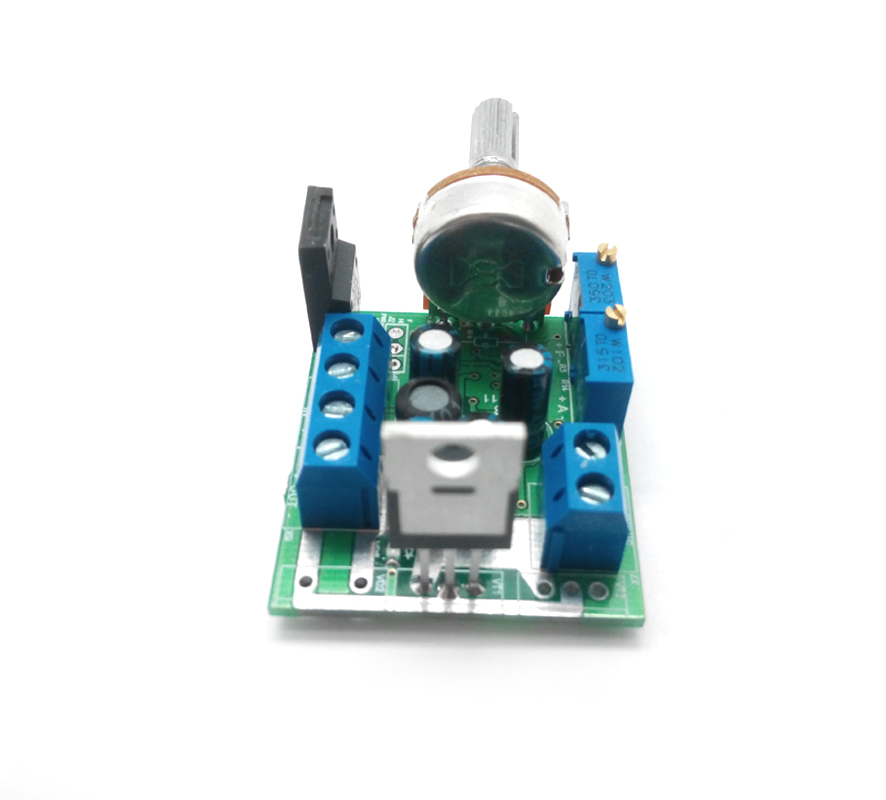
Выход таймера 555 может потреблять или передавать ток 200 мА в нагрузку. Поэтому, если двигатель, которым мы хотим управлять, превышает это значение, нам нужно использовать транзистор или полевой МОП-транзистор для управления двигателем. В этом примере я использовал транзистор Дарлингтона (TIP122), который может выдерживать ток до 5А.
Выход микросхемы необходимо подключить к базе транзистора через резистор, а в моем случае я использовал резистор 1 кОм.Для предотвращения скачков напряжения, создаваемых двигателем, нам необходимо использовать обратный диод, который подключен параллельно двигателю.
Разработка печатной платы для ШИМ-контроллера скорости двигателя постоянного тока
Теперь мы можем перейти к разработке специальной печатной платы для этой схемы. Для этого я воспользуюсь бесплатным онлайн-программным обеспечением EasyEDA. Здесь мы можем начать с поиска и размещения компонентов на пустом холсте. Библиотека состоит из сотен тысяч компонентов, поэтому у меня не возникло проблем с поиском всех необходимых компонентов для этой схемы ШИМ-контроллера скорости двигателя постоянного тока.
После вставки компонентов нам нужно создать контур платы и начать расположение компонентов. Два конденсатора должны быть размещены как можно ближе к таймеру 555, в то время как другие компоненты могут быть размещены где угодно, но все же в логическом порядке в соответствии с принципиальной схемой.
Используя инструмент отслеживания, нам нужно соединить все компоненты. Инструмент отслеживания интуитивно понятен и с ним легко работать. Мы можем использовать как верхний, так и нижний слой, чтобы избежать пересечений и сделать пути короче.
Контактные площадки компонентов, которые необходимо подключить к заземлению, устанавливаются на заземление на вкладке «Свойства контактной площадки», где нам нужно ввести GND в метку «Сеть», когда контактная площадка выбрана.
Мы можем использовать слой Silk, чтобы добавить текст на доску. Также мы можем вставить файл изображения, поэтому я добавляю изображение логотипа своего веб-сайта, которое будет напечатано на доске. В конце, используя инструмент «Медная область», нам нужно создать область заземления печатной платы.
Также мы можем вставить файл изображения, поэтому я добавляю изображение логотипа своего веб-сайта, которое будет напечатано на доске. В конце, используя инструмент «Медная область», нам нужно создать область заземления печатной платы.
Здесь вы можете найти файлы проекта EasyEDA этого проекта.
Когда мы закончим проектирование, нам просто нужно нажать кнопку «Вывод Gerber», сохранить проект, и мы сможем загрузить файлы Gerber, которые используются для изготовления печатной платы. Мы можем заказать печатную плату в JLCPCB, которая занимается производством печатных плат EasyEDA, а также является спонсором этого видео.
Здесь мы можем просто перетащить загруженный zip-файл с файлами gerber. После загрузки мы можем еще раз просмотреть печатную плату в программе просмотра Gerber.Если все в порядке, мы можем выбрать до 10 печатных плат и получить их всего за 2 доллара.
Сборка печатной платы контроллера скорости двигателя постоянного тока с ШИМ
Тем не менее, через неделю печатные платы были доставлены, и я должен признать, что создание собственной конструкции печатной платы весьма приятно. Качество печатных плат отличное, все точно так же, как и в дизайне.
Хорошо, теперь мы можем перейти к вставке компонентов на плату.
Вы можете получить компоненты, необходимые для этого примера, по ссылкам ниже:
Раскрытие информации: это партнерские ссылки.Как партнер Amazon я зарабатываю на соответствующих покупках.
Сначала я вставил более мелкие компоненты, резисторы, диоды и конденсаторы.
Я согнул их выводы с другой стороны, чтобы они оставались на месте, когда я переворачиваю плату для пайки. Что касается более крупных компонентов, я использовал малярную ленту, чтобы удерживать их на месте при переворачивании платы.
Вот окончательный вид платы, и теперь осталось подключить двигатель постоянного тока и подходящий источник питания для него.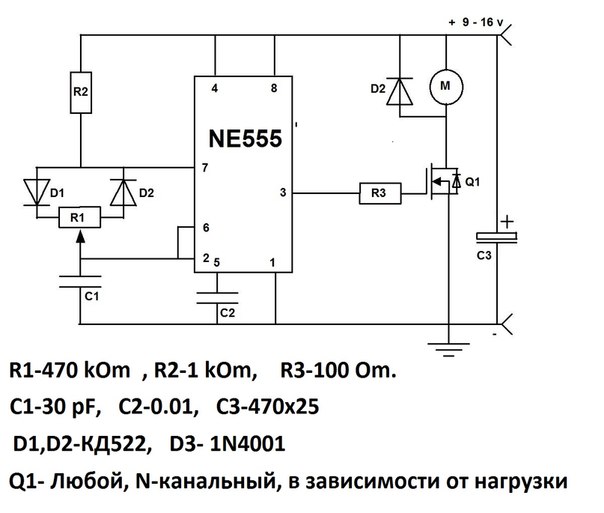
Я использовал двигатель постоянного тока с высоким крутящим моментом 12 В, который я питал от литий-ионных батарей 3,7 В, соединенных последовательно, что дает около 12 В. Итак, теперь, используя потенциометр, мы можем контролировать скорость двигателя постоянного тока или сигнал ШИМ, создаваемый микросхемой таймера 555.
Надеюсь, вам понравился этот урок и вы узнали что-то новое. Не стесняйтесь задавать любой вопрос в разделе комментариев ниже.
Управление щеточными двигателями постоянного тока с помощью ШИМ
Загрузите эту статью в формате PDF.
Для многих приложений, использующих миниатюрные щеточные двигатели постоянного тока, требуется, чтобы двигатели работали при более чем одной точке нагрузки или в течение определенных циклов нагрузки. Для запуска двигателя в пригодных для использования точках нагрузки требуется регулируемый источник переменного тока. Это может быть сделано с помощью источника питания с непрерывным линейным регулированием или широтно-импульсной модуляции (ШИМ).
Линейное регулирование обычно неэффективно и требует большего корпуса. Более того, в приложениях с батарейным питанием непрактично использовать линейное регулирование в различных точках нагрузки.С другой стороны, ШИМ-регулирование напряжения является эффективным и может эффективно использоваться с аккумуляторными батареями или приложениями с питанием от постоянного тока. Повышенная эффективность привода ШИМ увеличивает срок службы батареи и снижает нагрев электронных компонентов.
Одним из компромиссов использования ШИМ с двигателем являются потери на вихревые токи в обмотках ротора из-за непрерывного переключения ШИМ, которые, как правило, отсутствуют в линейных источниках питания. Однако правильно спроектированная ШИМ сводит к минимуму эффекты вихревых токов и улучшает работу двигателей.
Электродвигатели постоянного тока без сердечника с щеточным покрытием имеют низкую инерцию и индуктивность.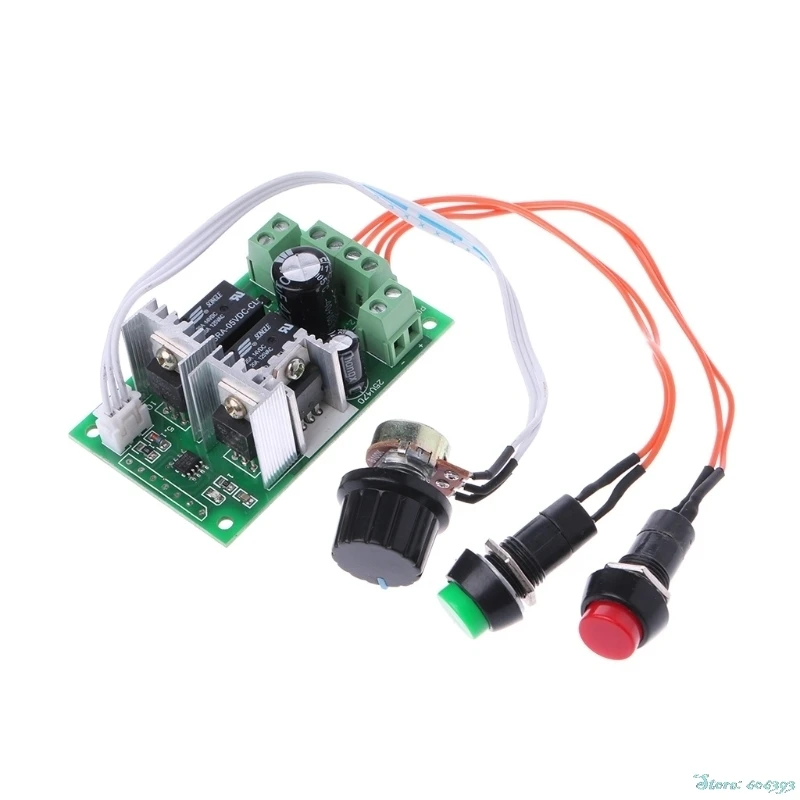 Это позволяет использовать их в приложениях, требующих динамического поведения и быстрой реакции двигателя. Использование ШИМ позволяет точно контролировать ток в обмотках. Следовательно, выходной крутящий момент, который линейно пропорционален среднему току обмотки, можно правильно контролировать в двигателях без сердечника.
Это позволяет использовать их в приложениях, требующих динамического поведения и быстрой реакции двигателя. Использование ШИМ позволяет точно контролировать ток в обмотках. Следовательно, выходной крутящий момент, который линейно пропорционален среднему току обмотки, можно правильно контролировать в двигателях без сердечника.
В отличие от чисто резистивных нагрузок для двигателей постоянного тока, сопротивление, индуктивность и обратная ЭДС на обмотках ротора являются решающими факторами при оптимизации частоты ШИМ и рабочего цикла.
Линейный источник питания по сравнению с ШИМ
В линейном источнике постоянного тока (как на рисунке ниже) ток зависит только от сопротивления обмотки. Индуктивность не влияет на ток, как у постоянного источника. Импеданс катушки индуктивности равен нулю.
Каталожные значения и прогноз срока службы большинства двигателей без сердечника оцениваются с использованием постоянного линейного источника постоянного тока.
Принципиальная схема приводного двигателя, использующего источник переменного постоянного тока.
При использовании источника ШИМ в цепи наблюдается омическое сопротивление и индуктивность из-за частых переключений.Кроме того, через терминал генерируется обратная ЭДС, эквивалентная характеристикам двигателя (KE) и скорости. Это усложняет схему ШИМ при ее проектировании для конкретного приложения, так как не только рабочий цикл, но и частота ШИМ должны контролироваться точно, чтобы получить наилучшие характеристики двигателя.
Когда двигатель находится в состоянии покоя или вращается с малой скоростью, обратной ЭДС можно пренебречь. Упрощенная эквивалентная схема двигателя показана ниже.
Когда двигатель находится в состоянии покоя или медленно движется, он может быть представлен катушкой индуктивности и резистором.
Диод свободного хода или демпфирующий диод (параллельный клеммам двигателя на приведенной выше схеме) никогда не следует пропускать при использовании переменного напряжения, например, с ШИМ. Диод позволяет заряду рассеиваться без искрения при переключении.
Диод позволяет заряду рассеиваться без искрения при переключении.
Когда двигатель работает на умеренно высокой скорости, обратная ЭДС сравнима с приложенным напряжением, поэтому компонент, представляющий обратную ЭДС, необходимо добавить в эквивалентную схему. Модифицированная эквивалентная схема показана ниже.
Когда двигатель работает с умеренной скоростью, он может быть представлен катушкой индуктивности, резистором и источником питания.
Обратная ЭДС вместе со схемой RL в щеточном двигателе постоянного тока вносит нелинейность в управление ШИМ, и частота ШИМ и рабочий цикл ШИМ становятся важными для получения наилучшей выходной мощности.
Когда ШИМ управляет двигателем и электромагнитная совместимость критична, рекомендуется анализировать эффекты излучения, потому что излучаемая электромагнитная энергия обычно выше с ШИМ, чем с линейными источниками постоянного тока.
Вольт-амперные характеристики
Когда напряжение подается на цепь RL, индуктор противодействует току в цепи.В результате ток экспоненциально возрастает до установившегося значения, которое зависит от отношения L / R двигателя. График ниже показывает экспоненциальный рост тока через обмотку в цепи RL. Когда приложенное напряжение снимается с цепи, ток медленно падает до нуля, экспоненциально затухая.
Этот график показывает экспоненциальный рост тока цепи RL.
Константа L / R (также известная как постоянная времени для цепи RL) определяет максимальную скорость изменения приложенного напряжения в цепи.Устойчивое состояние после любого изменения приложенного напряжения достигается через период, равный нескольким постоянным времени. График тока двигателя (вверху) показывает его экспоненциальный рост, что представляет собой идеальный сценарий. Пятикратная постоянная времени ( 5L / R ) обычно считается временем, необходимым для перехода в установившееся состояние. Однако при пятикратном увеличении постоянной времени схема находится примерно на 99,33% от своего максимального значения.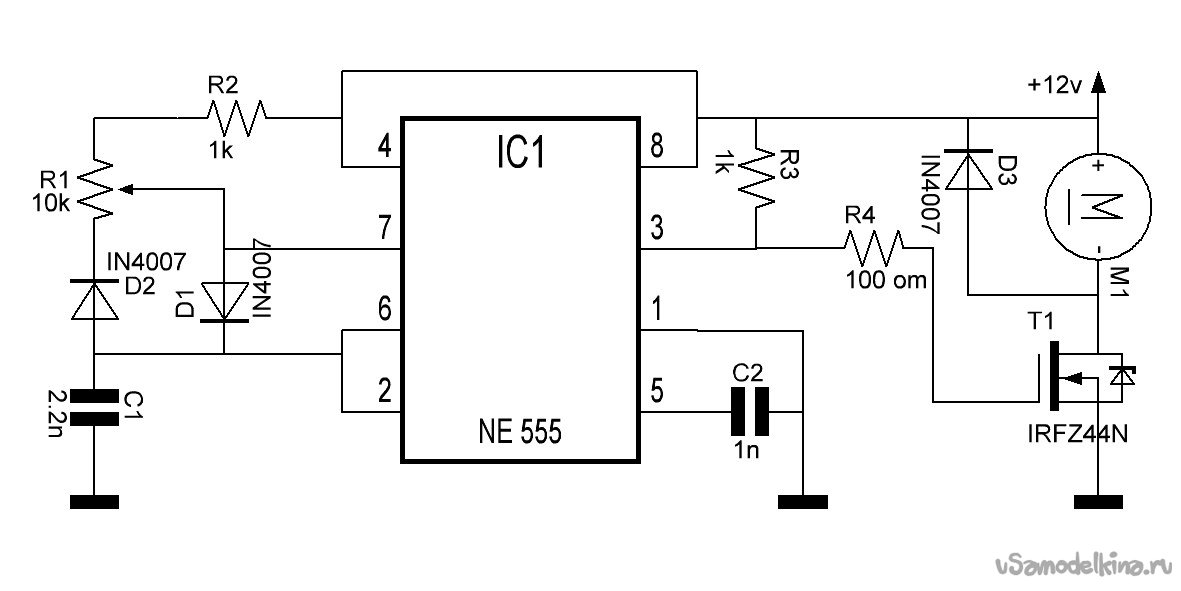
Игнорируя наличие обратной ЭДС для простоты, нарастание тока в простой цепи RL можно представить как:
Где
I 0 – максимальный ток через цепь RL для заданное напряжение.; τ – постоянная времени цепи RL, определяемая как время, необходимое для того, чтобы ток достиг 1 / е, или около 63,21% от максимального тока; и t – время.
При достижении устойчивого состояния при отключении питания ток в цепи RL экспоненциально спадает (как показано ниже).
На этом графике показано экспоненциальное нарастание и спад тока в цепи RL.
Соображения по конструкции ШИМ
Когда ШИМ-привод используется с щеточными двигателями постоянного тока, внутренняя индуктивность ротора действует как фильтр тока, что хорошо для схемы управления.Однако другие параметры конструкции, такие как частота ШИМ и рабочий цикл, влияют на пульсации тока и, следовательно, на срок службы щеточной коммутации.
Когда ШИМ управляет двигателем, ток через двигатель возрастает и падает с каждым периодом ШИМ. Если не учитывать обратную ЭДС двигателя, то нарастание тока является функцией индуктивности двигателя и общего сопротивления. Для каждого цикла ШИМ следует выбирать частоту ШИМ, чтобы у тока было достаточно времени для достижения своего установившегося значения, которое обычно больше 5τ.На приведенном ниже графике показаны условия, при которых частота ШИМ достаточна для достижения устойчивого состояния.
Вольт-амперные характеристики цепи RL с ШИМ. Частота ШИМ более чем в шесть раз превышает постоянную времени (6τ).
По мере того, как частота ШИМ превышает пороговое значение, время включения и выключения ШИМ становится короче времени, необходимого для работы цепи RL и тока для достижения установившегося состояния. Следовательно, ток колеблется между двумя значениями нестационарного состояния, что вызывает пульсации тока.На приведенном ниже графике показано состояние, когда частота ШИМ выше, чем время, необходимое для установившегося режима, и ток через двигатель колеблется.
В этой схеме RL с ШИМ частота ШИМ меньше трехкратной постоянной времени (3τ).
С точки зрения конструкции пульсация тока должна быть уменьшена путем регулировки частоты возбуждения так, чтобы выходной крутящий момент был почти линейным. Также рекомендуется поддерживать частоту ШИМ выше, чем диапазон слышимости человека (выше 20 кГц), поскольку пульсации тока в этом диапазоне частот могут создавать шум во время работы двигателя.
Пульсация тока
Для определенных щеточных двигателей без сердечника пульсация тока должна быть минимальной. Обычно пульсация ниже 10% считается низким значением. Более высокая пульсация влияет на производительность несколькими способами: Ÿ Выходной крутящий момент двигателя пропорционален току, в то время как омический (резистивный) нагрев в обмотке пропорционален квадрату тока. Таким образом, при пиковых токах нагрев обмоток будет преобладать и уменьшит производительность и срок службы двигателя. Ÿ В щеточных двигателях постоянного тока Portescap не используется металлическая пластина, поэтому потери на вихревые токи и гистерезис в магнитной цепи прямо пропорциональны пульсации тока и могут снизить общую производительность двигателя.Ÿ При замене драгоценных металлов повышенная электроэрозия влияет на срок службы двигателя, поскольку электроэрозия пропорциональна коэффициенту L x I eff 2 . где L – индуктивность, а I eff – эффективный ток через обмотку. Ÿ При коммутации угольных щеток повышенная пульсация тока увеличивает накопление патины. (Патина или пленка – это слой оксида меди, образованный на поверхности коммутатора угольной щетки, который улучшает коммутацию и снижает трение.) Следовательно, на более низких скоростях контакт щеток ухудшится. На средних и высоких скоростях патина не оказывает значительного влияния на моторные характеристики.
Индуктивное напряжение на клемме может быть задано как:
Где L – индуктивность; U L – напряжение, генерируемое на катушке индуктивности; и T – бесконечно малое время, за которое ток изменяется на ∆I.
При работе двигателя с ШИМ напряжению на его выводе противодействует обратная ЭДС, генерируемая на выводе двигателя.Следовательно, уравнение. 3 можно переписать как для повышения, так и для спада тока в операциях ШИМ как:
и:
Где нижний индекс ON обозначает время «включено», а OFF означает время «выключения» ШИМ. импульс так, чтобы общее время T P дается как:
Из уравнения. 5,
Вставка значения из уравнения. 7 в уравнение. 4, мы получаем
T ON и T OFF в приведенном выше уравнении можно задать как
и
Где D – рабочий цикл сигнала ШИМ.
Следовательно, уравнение. 8 можно переписать как:
Ур. 11 может использоваться для извлечения пульсаций тока в двигателе из-за сигнала ШИМ рабочего цикла D и частоты 1 / T P .
Интересно отметить, что из уравнения. 11 видно, что пульсации тока максимальны, когда рабочий цикл составляет 50%. Следовательно, предлагается, чтобы разработчики управляли двигателем вдали от зоны рабочего цикла 50%.
Кроме того, из приведенного выше уравнения пульсации тока зависят только от индуктивности двигателя, а не от его электрической постоянной времени.
В идеале для двигателей без сердечника разница (U ON – U OFF ), иногда выражаемая как ∆U, должна быть как можно меньше, в зависимости от максимального входного напряжения двигателя и скорости приложения.
Индуктивность двигателя на его клеммах зависит от частоты ШИМ. Например, в каталоге указана индуктивность двигателя Portescap на частоте 1 кГц; но на частоте 100 кГц индуктивность может снизиться до 20% от каталожного значения.
По сравнению с двигателями с железным сердечником индуктивность двигателей без сердечника в два раза ниже.Кроме того, коэффициент качества ниже, поскольку в обмотках ротора нет металлических пластин. Следовательно, ШИМ-привод с двигателем без сердечника будет иметь относительно более высокие потери и меньшую электронную стабильность.
Следовательно, ШИМ-привод с двигателем без сердечника будет иметь относительно более высокие потери и меньшую электронную стабильность.
Срок службы двигателя
В щеточных двигателях постоянного тока наиболее распространенным видом отказа является износ щеток из-за коммутации. В течение срока службы двигателя щетки (угольно-графитовые или драгоценные металлы) подпружинены и механически соединены с сегментами коллектора для зарядки катушек.Это делает износ щеток функцией механического трения, возникающего при скольжении щеток по сегментам коллектора, и электроэрозии, вызванной электрическими разрядами во время коммутации.
При использовании ШИМ-приводов для запуска двигателя с различными скоростями и точками нагрузки расчетный срок службы двигателя становится сложной комбинацией различных факторов, определяющих его свойства износа. Эти факторы могут включать: Ÿ Более высокая плотность тока при коммутации из-за пониженного КПД, высокого механического трения, недостаточной смазки или рециркуляции тока.Ÿ Высокая электроэрозия при скачках тока при использовании источников ШИМ. Ÿ Более высокая рабочая температура двигателя из-за условий окружающей среды или более высокая удельная мощность двигателя, что снижает качество смазки.
В зависимости от приложения и источника питания двигателя его ожидаемый срок службы может зависеть от одного или нескольких факторов, описанных выше.
Для двигателей, в которых точка нагрузки требует, чтобы двигатель работал с умеренным крутящим моментом и скоростью, без осевых и радиальных нагрузок, действующих на вал, и в умеренном диапазоне температур (обычно ниже 60 ° C), в износе обычно преобладает электрический ток. -эрозия.Тогда срок службы двигателя обратно пропорционален индуктивности и квадрату тока:
В приведенном выше уравнении рассматривается линейный или ШИМ-источник с пренебрежимо малой пульсацией тока по сравнению со средним током, протекающим через двигатель. В практических сценариях пульсация может значительно сократить срок службы двигателя./F108M_(10-90V-60A)-03.JPG?1513880782171132)
Случай 1: пульсации тока менее 10%. Чтобы уменьшить пульсации тока до менее 10% в щеточных двигателях постоянного тока Portescap, диапазон частот может достигать 40–120 кГц.
С ШИМ, уравнение. 12 можно переписать как:
l потери – это потери в диоде и потери из-за вихревых токов и гистерезиса на трубке двигателя. Эти потери снижают общий КПД двигателя. Однако хороший дизайн обеспечит КПД ШИМ от 85 до 90%.
Из уравнения. 12 и 13, а с учетом потерь l как 10% от двигателя I .
Тогда:
Следовательно, при 90% эффективности ШИМ,
Случай 2: пульсации тока значительны. Ур. 14 справедливо, когда потери I низкие по сравнению с двигателем I . Но когда пульсации тока высоки, мгновенные скачки тока через двигатель нагревают его; затем уравнение следует изменить на:
Рассматривая ШИМ с 50% рабочим циклом, где пульсации максимальны, а средняя мощность двигателя равна P, интегральную часть можно переписать как:
Таким образом, Уравнение 16 можно переписать с учетом 90% эффективности ШИМ как:
ШИМ увеличивает срок службы двигателя
Есть несколько вещей, которые можно сделать для увеличения срока службы двигателя при использовании ШИМ:
1.Уменьшите пульсации тока двигателя. Пульсации тока можно уменьшить, увеличив частоту ШИМ. Если частота ШИМ значительно выше постоянной времени двигателя (L / R), пульсации еще больше уменьшаются. Для двигателей Portescap без сердечника рекомендуется пульсация менее 10% для увеличения срока службы двигателя.
Другой интуитивно понятный подход к уменьшению пульсаций тока – это добавление внешней индуктивности в цепь двигателя, которая действует как фильтр тока. Обычно это повышает эффективность. Однако индуктор ухудшает общую электроэрозию системы щеточно-коммутатор, поскольку электроэрозия прямо пропорциональна индуктивности цепи. Следовательно, если только эффективность и нагрев двигателя не являются единственными проблемами, этот подход не рекомендуется.
Следовательно, если только эффективность и нагрев двигателя не являются единственными проблемами, этот подход не рекомендуется.
2. Конструкция преобразователя постоянного тока. В конструкциях, подобных приведенной ниже, эффективность системы значительно повышается, а срок службы щеток двигателя увеличивается по сравнению с решением, в котором к цепи добавляется внешняя индуктивность.
Чтобы оптимизировать схему, пульсации напряжения, заданные уравнением. 18, следует свести к минимуму. Значение менее 10% достаточно для практических двигательных операций.
Из приведенного ниже уравнения, на более высоких частотах значение индуктивности и конденсатора будет уменьшаться, и, следовательно, общая упаковка привода ШИМ уменьшится.
Ультразвуковые колебания могут возникать в роторе при работе двигателя на более низких частотах. Поэтому рекомендуется приводить двигатель в действие на частотах выше 20 кГц.
Для приложений с батарейным питанием, где используются миниатюрные двигатели, эффективность приложения определяет цикл зарядки батарей.ШИМ-привод помогает, позволяя двигателю работать с разной скоростью. Однако необходима точная конструкция ШИМ, чтобы пульсации тока и напряжения были незначительными, а срок службы двигателя не сокращался.
Сунил Кедиа – руководитель проектирования и разработки в Portescap.
Управление скоростью двигателя постоянного тока с использованием Arduino и PWM с программой и схемой
Управление скоростью двигателя постоянного тока с использованием Arduino и PWM
Управление скоростью двигателя постоянного тока с помощью интерфейса ПК – это простой проект, сделанный своими руками.В этом проекте скорость двигателя постоянного тока контролируется путем отправки команды через ПК. Arduino напрямую подключается к ПК через USB-кабель, и команда подается на Arduino на последовательном мониторе Arduino IDE.
Двигатель подключен к транзистору, а база транзистора подключена к выводу PWM Arduino, и скорость двигателей изменяется в соответствии с сигналом PWM, поступающим от Arduino.
Управление двигателем постоянного тока Arduino – Работает
Arduino подключается к ПК через USB-кабель.Мы можем отправить команду на ПК на последовательном мониторе. Мы можем изменить скорость двигателя от 0 до 9. Когда 0 посылается через Serial Monitor, двигатель работает на минимальной скорости (то есть нулевой). Когда скорость изменяется от 1 до 9, скорость увеличивается, при этом значение 9 устанавливается как максимальная скорость двигателя.
ШИМ-контроллер двигателя постоянного тока используется для управления скоростью. В ШИМ Arduino посылает пульсирующую волну, которая похожа на нестабильный режим микросхемы таймера 555.
ШИМ-контроль скорости (широтно-импульсная модуляция)
Микроконтроллер и Arduino – цифровые устройства; они не могут дать аналоговый выход.Микроконтроллер выдает на выходе НУЛЬ и ЕДИНИЦУ, где НУЛЬ – логический НИЗКИЙ, а ЕДИНИЦА – логический ВЫСОКИЙ. В нашем случае мы используем 5-вольтовую версию Arduino. Таким образом, логический НУЛЬ – это нулевое напряжение, а логический ВЫСОКИЙ – 5 напряжений.
Цифровой выход хорош для цифровых устройств, но иногда нам нужен аналоговый выход. В таком случае очень полезен ШИМ. В ШИМ выходной сигнал переключается между нулем и единицей, на высокой и фиксированной частоте, как показано на рисунке ниже.
Выходной сигнал ШИМКак показано на рисунке выше, время включения – «Ton», а время выключения – «Toff».T – это сумма «Ton» и «Toff», которая называется периодом времени. В концепции ШИМ «T» не меняется, и «Ton» и «Toff» могут изменяться, таким образом, когда «Ton» увеличивается, «Toff» будет уменьшаться, а «Toff» увеличиваться, когда «Ton» уменьшается пропорционально.
Рабочий цикл – это часть одного периода времени. Рабочий цикл обычно выражается в процентах или соотношении. Период – это время, необходимое сигналу для завершения цикла включения и выключения. В качестве формулы рабочий цикл может быть выражен как:
РАБОЧИЙ ЦИКЛ = (Тонна ÷ Т) x100%
Теперь скорость двигателя меняется в зависимости от рабочего цикла. Предположим, что коэффициент заполнения равен нулю, двигатель не работает, а при коэффициенте заполнения 100% двигатель работает на максимальных оборотах. Но эта концепция не всегда верна, потому что двигатель запускается после подачи некоторого фиксированного напряжения, называемого пороговым напряжением.
Предположим, что коэффициент заполнения равен нулю, двигатель не работает, а при коэффициенте заполнения 100% двигатель работает на максимальных оборотах. Но эта концепция не всегда верна, потому что двигатель запускается после подачи некоторого фиксированного напряжения, называемого пороговым напряжением.
Транзистор (2N2222)
Микроконтроллери Arduino могут обрабатывать сигналы и потреблять ток от 20 до 40 мА, но двигатели нуждаются в высоком токе и напряжении, поэтому мы используем транзистор для управления двигателем. Транзистор соединен последовательно с двигателем, а база транзистора соединена с выводом PWM Arduino через сопротивление.Сигнал PWM поступает от Arduino, и транзистор работает как переключатель, и он закорачивает эмиттер (E) и коллектор (C), когда сигнал PWM находится в состоянии High, и обычно открывается, когда сигнал PWM находится в состоянии LOW. Этот процесс работает непрерывно, и двигатели работают с желаемой скоростью.
Компоненты
| Компоненты | Спецификация | Количество |
|---|---|---|
| Arduino | Nano | 1 |
| Двигатель постоянного тока | Низкое энергопотребление | 1 |
| Транзистор | 2N222 | 1 |
| Адаптер питания | 12 В | 1 |
| Сопротивление | 1K | 1 |
| Диод | 1N4004 | 1 |
| Кабель USB | Для Arduino Nano | 1 |
Управление двигателем постоянного тока Arduino – Схема
Принципиальная схема показана на рисунке ниже.Если вы делаете эту схему на печатной плате общего назначения (ZERO PCB) или макетной плате, этот рисунок будет полезен.
Контроль скорости двигателя постоянного тока Arduino Более того, если вы хорошо разбираетесь в травлении печатных плат, используйте изображения, представленные ниже.
В схеме используется Arduino Nano , очень маленький по размеру и совместимый с макетной платой.
Вывод BASE транзистора (2n2222) подключен к выводу D9 Arduino через сопротивление 1 кОм, сопротивление используется для ограничения тока. Двигатель подключен между коллекторным выводом транзистора и Vcc. Диод (1n4004) подключен параллельно двигателю с обратным смещением; он используется для блокировки обратного тока. Эмиттерный вывод транзистора подключен к земле. Эта схема питается от адаптера на 12 В.
Управление двигателем Arduino PWM – видео
Управление двигателем постоянного тока Arduino Управление двигателем Arduino PWM
Управление скоростью двигателя постоянного тока – Загрузить программу
Скачать программу / код
В начале кода объявлены два целых числа с именами «out1» и «val», где out1 равно 9, что показывает, что вывод D9 Arduino используется как вывод (или вывод ШИМ).Более того, данные, поступающие от последовательного монитора, сохраняются во втором целом числе «val».
В void setup () последовательная связь начинается с использования функции «Serial.begin (9600)», где 9600 – это скорость передачи последовательного монитора. После этого «out1» объявляется как выход, потому что двигатель является выходным устройством.
В цикле void «serial.available» используется внутри условия «если», оно становится истинным, когда какие-либо данные отправляются через монитор последовательного порта. Эти данные сохраняются в виде целого числа val с использованием Serial.читать ».
После этого используется много условий «если», в первом «условии если», когда через монитор последовательного порта отправляется «0», оно становится истинным.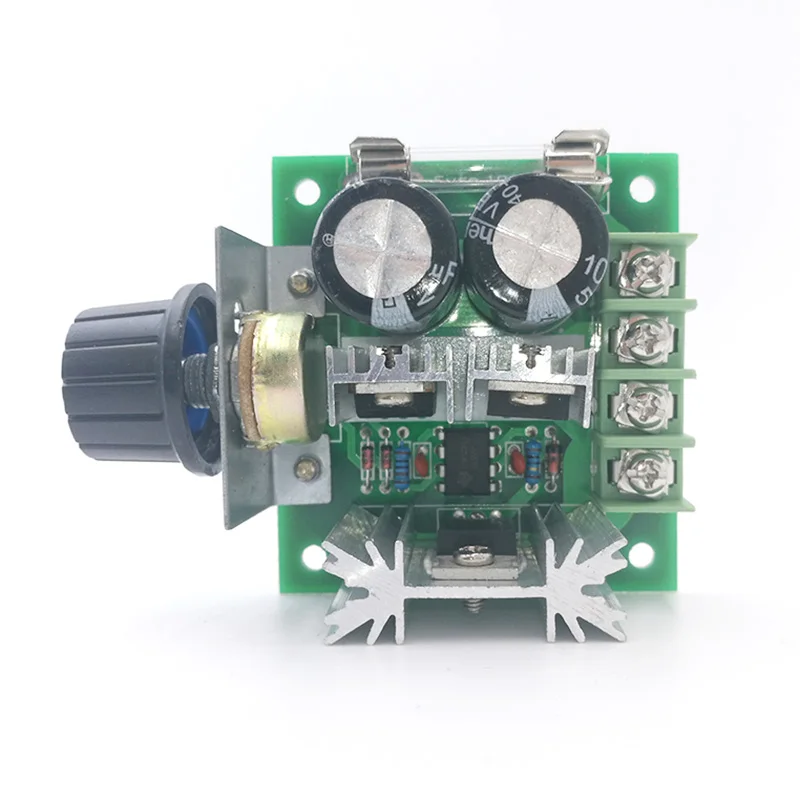 В скобках «analogWrite (out1, 0)» используется для запуска двигателя при нулевом значении ШИМ. В функции analogWrite (out1, 0) «out1» используется для обозначения вывода, который мы хотим использовать, а «0» – это значение ШИМ на этом выводе. После этого на последовательном мониторе отображается «Speed is = 0» с помощью функции «Serial.println». После этого целое число «val» обновляется до 10, где 10 – случайное значение, отличное от 0 до 9.
В скобках «analogWrite (out1, 0)» используется для запуска двигателя при нулевом значении ШИМ. В функции analogWrite (out1, 0) «out1» используется для обозначения вывода, который мы хотим использовать, а «0» – это значение ШИМ на этом выводе. После этого на последовательном мониторе отображается «Speed is = 0» с помощью функции «Serial.println». После этого целое число «val» обновляется до 10, где 10 – случайное значение, отличное от 0 до 9.
В следующей строке, если условие используется для «val == 1», в это время двигатель работает со значением PWM, равным 175. Те же условия используются до 9, в 9 двигателях используется значение 255 PWM, 255 – это максимальное значение PWM. ценить.
Процесс
- Подключите Arduino через USB и загрузите код
- Откройте монитор последовательного порта и установите скорость передачи 9600
- Теперь введите любое число от 0 до 9.
После ввода любого значения от нуля до 9 скорость двигателя меняется, но мы не можем правильно увидеть изменение скорости на видео, но вы можете увидеть это вживую.
Введение в широтно-импульсную модуляцию, управление скоростью и приложения
Использование ШИМ в качестве метода переключения
Широтно-импульсная модуляция (ШИМ) – это широко используемый метод для общего управления мощностью постоянного тока на электрическое устройство, реализованный на практике с помощью современной электронной энергетики переключатели. Однако он также находит свое место в прерывателях переменного тока. Среднее значение тока, подаваемого на нагрузку, регулируется положением переключателя и продолжительностью его состояния. Если период включения переключателя больше по сравнению с периодом выключения, нагрузка получает сравнительно более высокую мощность.Таким образом, частота переключения ШИМ должна быть выше.
Обычно переключение должно производиться несколько раз в минуту в электрической плите, 120 Гц в диммере лампы, от нескольких килогерц (кГц) до десятков кГц для моторного привода. Частота коммутации усилителей звука и компьютерных блоков питания составляет от десяти до сотен кГц. Отношение времени включения к периоду импульса известно как рабочий цикл. Если рабочий цикл низкий, это означает низкую мощность.
Частота коммутации усилителей звука и компьютерных блоков питания составляет от десяти до сотен кГц. Отношение времени включения к периоду импульса известно как рабочий цикл. Если рабочий цикл низкий, это означает низкую мощность.
Потери мощности в коммутационном устройстве очень малы из-за почти незначительного тока, протекающего в выключенном состоянии устройства, и незначительного падения напряжения в выключенном состоянии.Цифровое управление также использует метод ШИМ. ШИМ также использовался в некоторых системах связи, где его рабочий цикл использовался для передачи информации по каналу связи.
ШИМ может использоваться для регулировки общего количества мощности, подаваемой на нагрузку, без потерь, обычно возникающих, когда передача мощности ограничивается резистивными средствами. К недостаткам относятся пульсации, определяемые рабочим циклом, частотой переключения и свойствами нагрузки. При достаточно высокой частоте переключения и, при необходимости, использовании дополнительных пассивных электронных фильтров последовательность импульсов может быть сглажена и восстановлена средняя аналоговая форма волны.Системы управления с высокочастотной ШИМ могут быть легко реализованы с использованием полупроводниковых переключателей.
Как уже было сказано выше, переключатель почти не рассеивает мощность ни в состоянии, ни в выключенном состоянии. Однако во время переходов между включенным и выключенным состояниями как напряжение, так и ток не равны нулю, и, таким образом, значительная мощность рассеивается в переключателях. К счастью, изменение состояния между полностью включенным и полностью выключенным происходит довольно быстро (обычно менее 100 наносекунд) по сравнению с типичным временем включения или выключения, поэтому средняя рассеиваемая мощность довольно низка по сравнению с мощностью, подаваемой даже при высоких частотах переключения. используются.
Использование ШИМ для подачи питания постоянного тока на нагрузку
 youtube.com/embed/oetQ_UIvZhA” frameborder=”0″ allowfullscreen=”allowfullscreen”/>
youtube.com/embed/oetQ_UIvZhA” frameborder=”0″ allowfullscreen=”allowfullscreen”/> Большая часть производственных процессов требует выполнения определенных параметров, касающихся скорости привода. Системы электропривода, используемые во многих промышленных приложениях, требуют более высокой производительности, надежности, регулируемой скорости из-за простоты управления. Регулировка скорости двигателя постоянного тока важна в приложениях, где точность и защита имеют решающее значение. Назначение регулятора скорости двигателя – принять сигнал, представляющий требуемую скорость, и привести двигатель в движение с этой скоростью.
Широтно-импульсная модуляция (ШИМ) применительно к управлению двигателем – это способ передачи энергии посредством последовательности импульсов, а не непрерывно изменяющегося (аналогового) сигнала. Увеличивая или уменьшая ширину импульса, контроллер регулирует поток энергии на вал двигателя. собственная индуктивность двигателя действует как фильтр, хранение энергии в течение цикла «ON», выпуская его со скоростью, соответствующей сигнал входного сигнала или эталонным. Другими словами, энергия поступает в нагрузку не столько переключения частоты, но на опорной частоте.
Схема используется для управления скоростью двигателя постоянного тока с использованием метода ШИМ. Контроллер двигателя постоянного тока с регулируемой скоростью 12 В использует микросхему таймера 555 в качестве генератора импульсов ШИМ для регулирования скорости двигателя 12 В постоянного тока. IC 555 – это популярная микросхема таймера, используемая для создания схем таймера. Он был представлен в 1972 году компанией Signetics. Он называется 555, потому что внутри находятся три резистора по 5 кОм. ИС состоит из двух компараторов, цепи резисторов, триггера и выходного каскада. Он работает в 3 основных режимах – Астабильный, Моностабильный (где он действует как генератор однократных импульсов и Бистабильный режим.То есть, когда он срабатывает; выходной сигнал становится высоким в течение периода, зависящего от значений резистора синхронизации и конденсатора. В нестабильном режиме (AMV) ИС работает как автономный мультивибратор. Выходной сигнал постоянно меняется на высокий и низкий, давая пульсирующий выход в качестве генератора. В бистабильном режиме, также известном как триггер Шмитта, ИС работает как триггер с высоким или низким выходом на каждом триггере и сбросе.
В нестабильном режиме (AMV) ИС работает как автономный мультивибратор. Выходной сигнал постоянно меняется на высокий и низкий, давая пульсирующий выход в качестве генератора. В бистабильном режиме, также известном как триггер Шмитта, ИС работает как триггер с высоким или низким выходом на каждом триггере и сбросе.
В этой схеме используется МОП-транзистор IRF540. Это усовершенствованный N-канальный МОП-транзистор.Это усовершенствованный силовой полевой МОП-транзистор, разработанный, испытанный и гарантированно выдерживающий заданный уровень энергии в лавинном режиме пробоя. Эти силовые полевые МОП-транзисторы предназначены для таких приложений, как импульсные регуляторы, переключающие преобразователи, драйверы двигателей, релейные драйверы и драйверы для мощных биполярных переключающих транзисторов, требующих высокой скорости и низкой мощности управления затвором. Эти типы могут управляться напрямую от интегральных схем. Рабочее напряжение этой цепи можно регулировать в соответствии с потребностями управляемого двигателя постоянного тока.Эта схема может работать от 5-18 В постоянного тока.
Вышеупомянутая схема, то есть управление скоростью двигателя постоянного тока с помощью метода ШИМ, изменяет рабочий цикл, который, в свою очередь, управляет скоростью двигателя. IC 555 подключен в нестабильном режиме к автономному мультивибратору. Схема состоит из потенциометра и двух диодов, которые используются для изменения рабочего цикла и поддержания постоянной частоты. При изменении сопротивления переменного резистора или потенциометра рабочий цикл импульсов, подаваемых на полевой МОП-транзистор, изменяется, и, соответственно, изменяется мощность постоянного тока на двигатель, и, таким образом, его скорость увеличивается с увеличением рабочего цикла.
Использование ШИМ для подачи питания переменного тока на нагрузку
Современные полупроводниковые переключатели, такие как полевые МОП-транзисторы или биполярные транзисторы с изолированным затвором (IGBT), являются идеальными компонентами. Таким образом могут быть построены контроллеры с высокой эффективностью. Обычно преобразователи частоты, используемые для управления двигателями переменного тока, имеют КПД выше 98%. Импульсные источники питания имеют более низкий КПД из-за низкого уровня выходного напряжения (часто требуется даже менее 2 В для микропроцессоров), но все же можно достичь КПД более 70-80%.
Таким образом могут быть построены контроллеры с высокой эффективностью. Обычно преобразователи частоты, используемые для управления двигателями переменного тока, имеют КПД выше 98%. Импульсные источники питания имеют более низкий КПД из-за низкого уровня выходного напряжения (часто требуется даже менее 2 В для микропроцессоров), но все же можно достичь КПД более 70-80%.
Этот вид управления переменным током является известным по мощности методом отложенного угла зажигания. Он дешевле и генерирует много электрических шумов и гармоник по сравнению с настоящим ШИМ-регулятором, который создает незначительный шум.
Во многих приложениях, таких как промышленное отопление, управление освещением, асинхронные двигатели с плавным пуском и регуляторы скорости для вентиляторов и насосов, требуется переменное напряжение переменного тока от постоянного источника переменного тока. Для этих требований широко используется регулировка фазового угла регуляторов.Он предлагает некоторые преимущества, такие как простота и возможность экономичного управления большим количеством энергии. Однако запаздывающий угол зажигания вызывает прерывистость и обилие гармоник в токе нагрузки, а на стороне переменного тока возникает запаздывающий коэффициент мощности при увеличении угла зажигания.
Эти проблемы можно решить, используя прерыватель переменного тока с ШИМ. Этот прерыватель переменного тока с ШИМ имеет несколько преимуществ, таких как синусоидальный входной ток с коэффициентом мощности, близким к единице. Однако, чтобы уменьшить размер фильтра и улучшить качество выходного регулятора, следует увеличить частоту переключения.Это вызывает большие потери при переключении. Другая проблема заключается в коммутации переключающего переключателя S1 с переключателем свободного хода S2. Это вызывает скачок тока, если оба переключателя включены одновременно (короткое замыкание), и скачок напряжения, если оба переключателя выключены (нет свободного пути). Чтобы избежать этих проблем, использовался демпфер RC.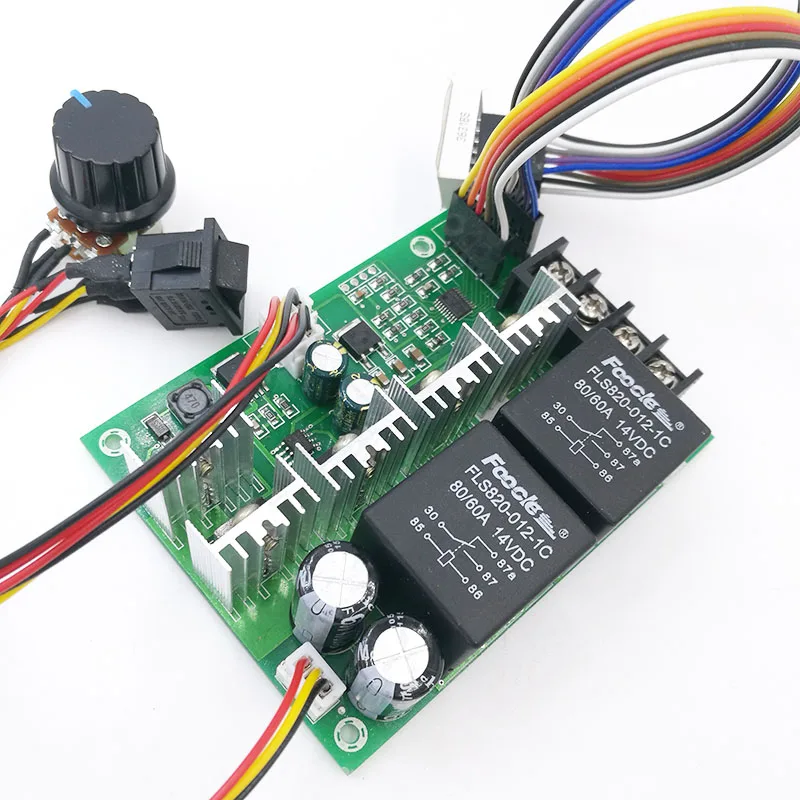 Однако это увеличивает потери мощности в цепи и является сложным, дорогим, громоздким и неэффективным для приложений с большой мощностью. Предлагается прерыватель переменного тока с переключением напряжения нулевого тока (ZCS-ZVS).Его регулятор выходного напряжения должен изменять время выключения, контролируемое ШИМ-сигналом. Таким образом, необходимо использовать регулирование частоты для достижения мягкого переключения, а в общих системах управления используются методы ШИМ, определяющие время включения. Этот метод имеет такие преимущества, как простое управление с сигма-дельта-модуляцией и постоянный входной ток. Ниже представлены особенности предлагаемой схемы и схемы с прерыванием ШИМ.
Однако это увеличивает потери мощности в цепи и является сложным, дорогим, громоздким и неэффективным для приложений с большой мощностью. Предлагается прерыватель переменного тока с переключением напряжения нулевого тока (ZCS-ZVS).Его регулятор выходного напряжения должен изменять время выключения, контролируемое ШИМ-сигналом. Таким образом, необходимо использовать регулирование частоты для достижения мягкого переключения, а в общих системах управления используются методы ШИМ, определяющие время включения. Этот метод имеет такие преимущества, как простое управление с сигма-дельта-модуляцией и постоянный входной ток. Ниже представлены особенности предлагаемой схемы и схемы с прерыванием ШИМ.
Купить 1,8 – 12В 2A ШИМ-контроллер скорости двигателя постоянного тока онлайн
Описание
ШИМ-регулятор скорости двигателя постоянного тока 1.Функция переключателя управления скоростью 8 В, 3 В, 5 В, 6 В, 12 В-2 А для двигателей постоянного тока позволяет управлять направлением двигателя постоянного тока с помощью напряжения постоянного тока с широтно-импульсной модуляцией (ШИМ) с рабочим циклом, полностью регулируемым от 0% до 100% .
Контроллер скорости двигателя может легко обеспечить постоянный ток 2А для вашего двигателя постоянного тока или другой нагрузки постоянного тока. Этот контроллер скорости двигателя позволяет управлять направлением двигателя постоянного тока с помощью напряжения постоянного тока с широтно-импульсной модуляцией (ШИМ).
С самовосстанавливающимся предохранителем он может автоматически разрывать соединение и автоматически восстанавливать его.Со светодиодным индикатором и поворотным переключателем, удобно использовать.
Инструкция по эксплуатации: 1. Подключите двигатель постоянного тока (или нагрузку постоянного тока) к клеммам двигателя, как показано на схеме подключения.
2. Подключите напряжение 1,8–15 В постоянного тока к цепи, убедившись в правильной полярности подключения.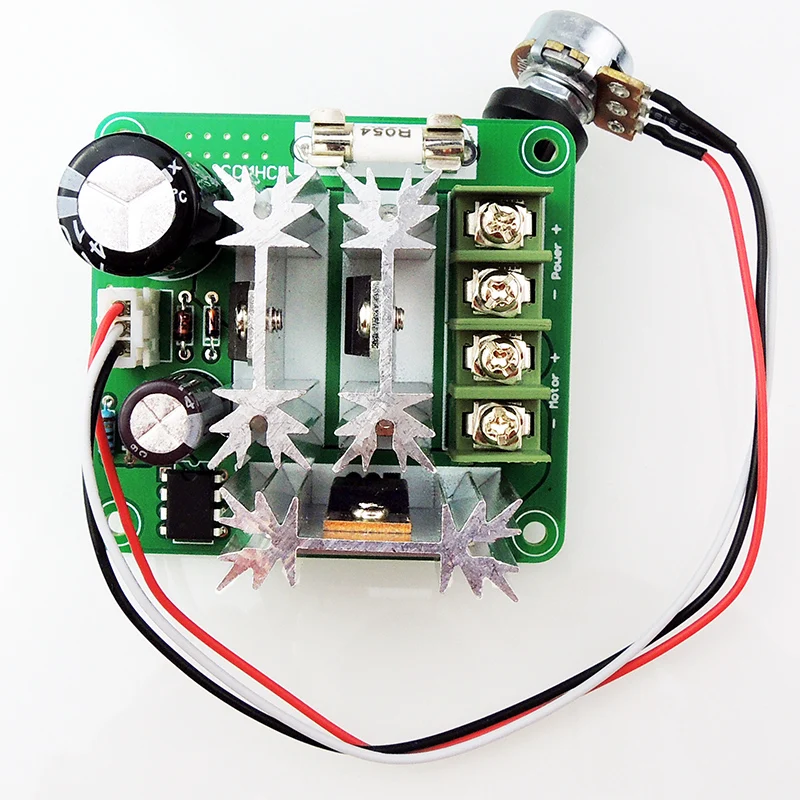 Обратите внимание, что напряжение, приложенное к двигателю, будет напряжением питания, приложенным к цепи.
Обратите внимание, что напряжение, приложенное к двигателю, будет напряжением питания, приложенным к цепи.
3. Теперь вы можете контролировать скорость двигателя с помощью потенциометра .
Характеристики:
- Выходной ток: 2А (макс.).
- С самовосстанавливающимся предохранителем.
- Оборудован светодиодным индикатором.
- Потенциометр с функцией переключения для регулировки ШИМ.
В коплект входит:
1 x ШИМ-регулятор скорости двигателя постоянного тока
Гарантия 15 днейНа этот товар распространяется стандартная гарантия сроком 15 дней с момента доставки только в отношении производственных дефектов.Эта гарантия предоставляется клиентам Robu в отношении любых производственных дефектов. Возмещение или замена производятся в случае производственных дефектов.
Что аннулирует гарантию:
Если продукт подвергся неправильному использованию, вскрытию, статическому разряду, аварии, повреждению водой или огнем, использованию химикатов, пайке или каким-либо изменениям.
PICAXE 18M2 Микроконтроллер ШИМ-регулятор скорости двигателя
Рис. 1
Льюис Лофлин
Цель этой демонстрации – представить широтно-импульсную модуляцию (ШИМ) и использование 10-битного аналого-цифрового преобразователя PICAXE для управления скоростью двигателя постоянного тока.Широтно-импульсная модуляция используется не только для управления скоростью двигателя, но и в импульсных источниках питания.
На рис. 1 представлена схема этой демонстрации и показано, как подключить PICAXE 18M2, который я использую. Нельзя просто использовать светодиод вместо двигателя для наблюдения за яркостью по отношению к положению потенциометра. Для контроля скорости используйте горшок на 5 или 10 километров.
В случае двигателя это может быть любое напряжение в пределах драйвера транзистора NPN.![]() Транзистор необходим, потому что микроконтроллер просто не может справиться с питанием.Диод 1N4001 и конденсатор 220 нФ используются для подавления электрических помех.
Транзистор необходим, потому что микроконтроллер просто не может справиться с питанием.Диод 1N4001 и конденсатор 220 нФ используются для подавления электрических помех.
Фиг.2
Общие сведения о частоте и рабочем цикле
Необходимо понимать три взаимосвязанных величины частоты, периода и рабочего цикла. Частота и период взаимны. Период = 1 / частота; поэтому период 1000 Гц равен 1/1000 = 0,001 или 1 мс. Также обратите внимание, что 1 / период = частота.
Рабочий цикл относится к взаимосвязи включения / выключения (метка / пробел в руководстве PICAXE) в течение одного периода времени.Период также относится к полному циклу. Рис. 2 выше иллюстрирует эту взаимосвязь.
Допустим, наша частота равна 1000 Гц, тогда период будет 1 мс. Предполагая период 1 мсек. для рис. 2 и время включения 25 процентов, что соответствует 0,25 мс. ВЫСОКИЙ (5 В) и 0,75 мсек. НИЗКИЙ (0 вольт). Формула рабочего цикла: время ВЫСОКАЯ (тонна), деленное на период. В данном случае 25 процентов.
PICAXE 18M2 имеет только два выхода ШИМ на контактах B.3 и B.6 и ограничен этими двумя контактами.Это реализовано с помощью оборудования, поэтому после настройки и работы не должно мешать работе программы или наоборот. Понимание периода и рабочего цикла PICAXE – это головная боль. Потому что мы можем изменить частоту внутреннего резонатора (часы), что полностью изменит наш выход ШИМ. На странице 165 их руководства мы получаем: «Вывод PWMOUT, период, рабочие циклы».
Период ШИМ = (период + 1) x 4 x скорость резонатора. На частоте 4 МГц частота резонатора = (частота вращения резонатора на частоте 4 МГц = 1/4000000) =.25 мкс. Чем ниже частота (а значит, больше период), мы должны разделить тактовую частоту. Например, использование pwndiv4 разделит 4 мГц на 1 мГц с периодом 1 мкс. Лучше всего использовать их мастера: в компиляторе нажмите PICAXE – wizards – pwmout.
Ссылаясь на вышеупомянутый “штифт” может быть либо B.3, либо B.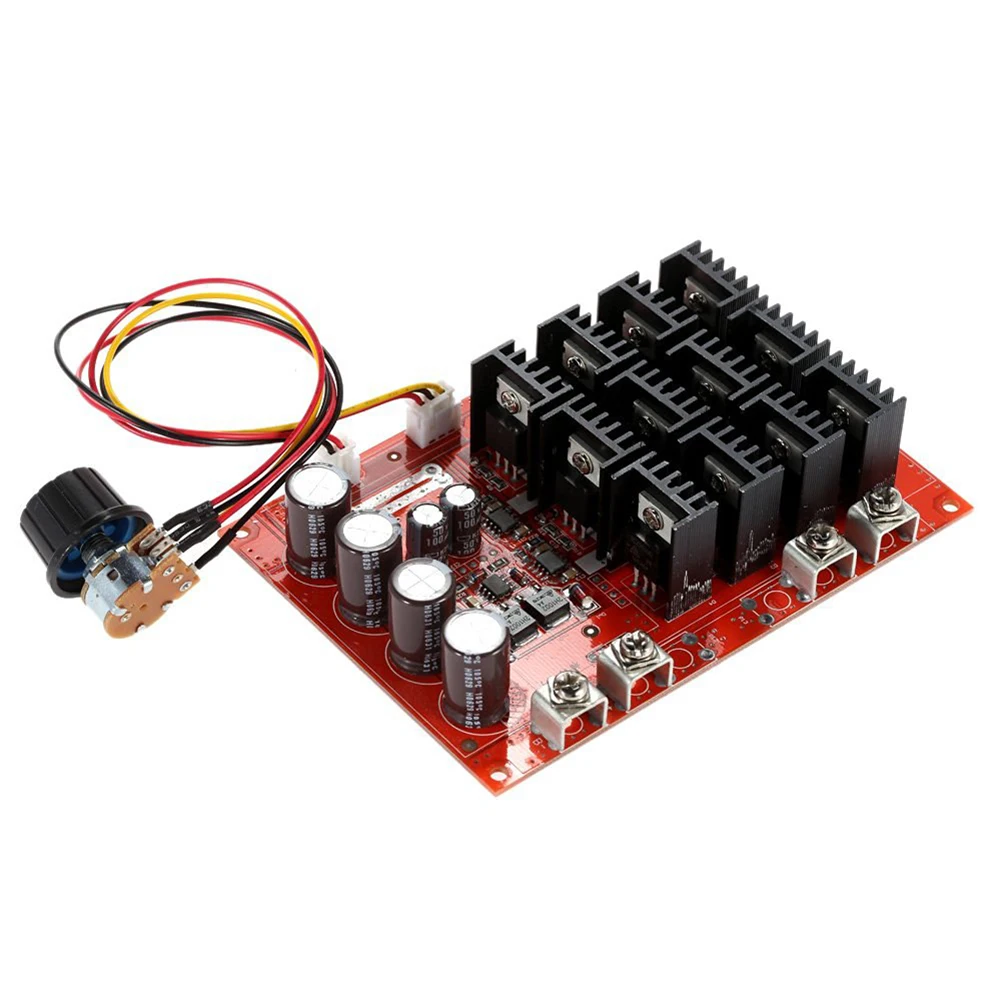 6 для 18M2; период – это число от 0 до 255; рабочие циклы – это число от 0 до 1023. В приведенной ниже программе я использую частоту 1000 Гц и рабочий цикл 50 процентов. Цифры, которые я получил, основаны на их мастере.Чтобы остановить pwmout: «pwmout pin, off» или «pwmout pin, 0,0»
6 для 18M2; период – это число от 0 до 255; рабочие циклы – это число от 0 до 1023. В приведенной ниже программе я использую частоту 1000 Гц и рабочий цикл 50 процентов. Цифры, которые я получил, основаны на их мастере.Чтобы остановить pwmout: «pwmout pin, off» или «pwmout pin, 0,0»
Рис.3 PICAXE 18M2.
О программе
В приведенной ниже программе используются три команды. Pwmout настраивает B.3 для прямоугольной волны 50% рабочего цикла 1000 Гц. Readadc10 считывает позицию элемента управления 5k или 10k, подключенного к B.4, и возвращает значение от 0 до 1023. Val должна быть 16-битной “словарной” переменной. Команда «pwmduty» изменяет рабочий цикл прямоугольной волны с B.3 «на лету», то есть без его выключения и сброса всей последовательности.Чем выше рабочий цикл, тем быстрее должен работать двигатель. (Или ярче светодиода.)
setfreq m4; Все детали М2 внутренние к31, ; к250, к500, м1, м2, м4, м8, м16, м32 символ speed_control = B.4 символ val = w0; word (16-битная) пользовательская переменная символ pwmPin = B.3 в этом: pwmout pwmdiv4, pwmPin, 249, 500 основной: readadc10 speed_control, val ; читать 10-битный АЦП в переменную w0 pwmduty pwmPin, val; установить pwm duty goto main; возврат к началу цикла, чтобы начать
Фиг.4 использует силовой полевой МОП-транзистор.
Микроконтроллер Picaxe Проекты!
Серия микроконтроллеров PICAXE считается самым простым и наиболее экономичным способом использования процессоров Microchip. Мне нужен был более простой и менее дорогой способ познакомить моих студентов с микроконтроллером «PIC». Здесь я надеюсь помочь тем, кто только что начал писать плохо написанную литературу и отсутствие простых примеров рабочего кода.
Посмотрите, как я попал в электронику
ШИМ-регулятор скорости двигателя постоянного тока, 28 В, 3A, переменная плата модуля
, ШИМ-регулятор скорости двигателя постоянного тока, 28 В, 3A, плата модуля, переменная Магазин не будет работать корректно, если куки отключены.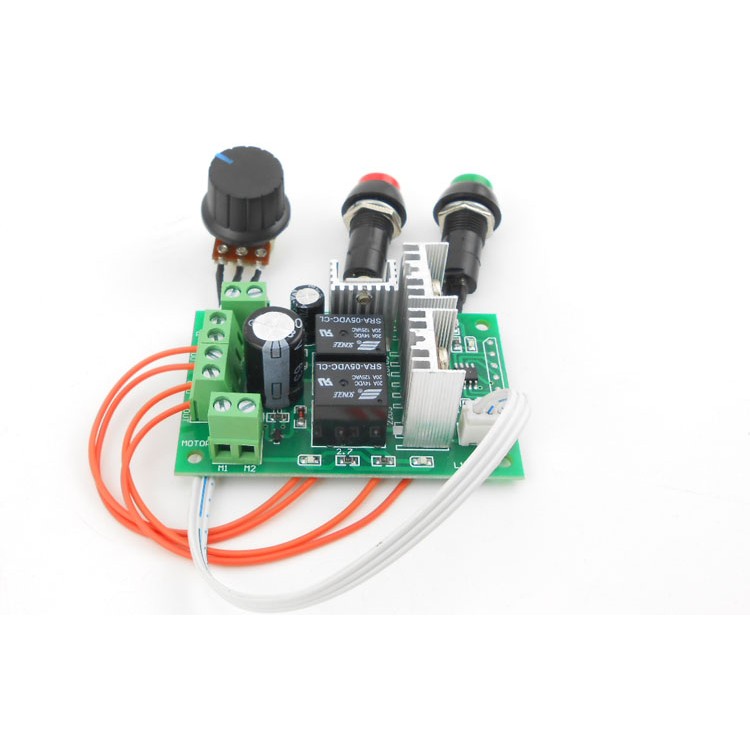
Похоже, в вашем браузере отключен JavaScript. Для наилучшего взаимодействия с нашим сайтом обязательно включите Javascript в своем браузере.
Этот контроллер скорости двигателя постоянного тока позволяет управлять скоростью двигателя постоянного тока с помощью напряжения постоянного тока с широтно-импульсной модуляцией (ШИМ) с рабочим циклом, полностью регулируемым от 5% до 100%.Его можно использовать для управления всеми щеточными двигателями постоянного тока, которые работают от 6 до 28 В постоянного тока и потребляют до 3 А.
- Приложения:
- Для управления скоростью всех типов щеточных двигателей постоянного тока
- Для управления скоростью охлаждающего вентилятора автомобиля, автоматической скоростью вентилятора, стеклоочистителями, автоматическим кондиционером.
- Для управления скоростью ленты, скоростью вытяжного вентилятора трубопровода, скоростью беговой дорожки, многоскоростным параллельным компьютерным вентилятором, скоростью электронного вентилятора.
- Спецификация:
- Входное напряжение питания: 6-28 В постоянного тока
- Максимальная выходная мощность: 80 Вт
- Максимальный непрерывный выходной ток: 3А
- Рабочий цикл регулируется: 5% -100%
- Инструкция по эксплуатации:
- Подключите двигатель постоянного тока (или нагрузку постоянного тока) к клеммам двигателя, как показано на схеме подключения.
