Регулятор оборотов на щеточный двигатель. Самостоятельное изготовление регулятора оборотов электродвигателя. Короткозамкнутый и фазный роторы
Не каждая современная дрель или болгарка оснащена заводским регулятором оборотов, и чаще всего регулировка оборотов не предусмотрена вовсе. Тем не менее, как болгарки, так и дрели построены на базе коллекторных двигателей, что позволяет каждому их владельцу, маломальски умеющему обращаться с паяльником, изготовить собственный регулятор оборотов из доступных электронных компонентов, хоть из отечественных, хоть из импортных.
В данной статье мы рассмотрим схему и принцип работы простейшего регулятора оборотов двигателя электроинструмента, и единственное условие — двигатель должен быть коллекторным — с характерными ламелями на роторе и щетками (которые порой искрят).
Приведенная схема содержит минимум деталей, и подойдет для электроинструмента мощностью до 1,8 кВт и выше, для дрели или болгарки. Похожая схема используется для регулировки оборотов в автоматических стиральных машинах, в которых стоят коллекторные высокоскоростные двигатели, а также в диммерах для ламп накаливания.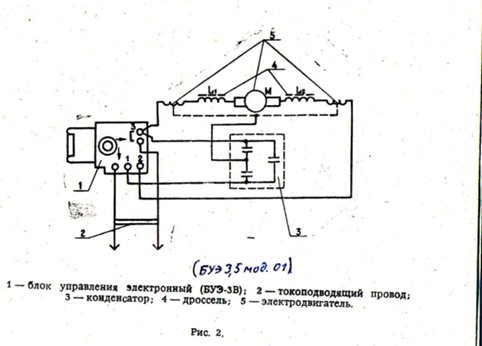
Потребуются следующие радиоэлектронные компоненты:
Резистор постоянный R1 – 6,8 кОм, 5 Вт.
Переменный резистор R2 – 2,2 кОм, 2 Вт.
Резистор постоянный R3 – 51 Ом, 0,125 Вт.
Конденсатор пленочный C1 – 2 мкф 400 В.
Конденсатор пленочный C2 – 0,047 мкф 400 вольт.
Диоды VD1 и VD2 – на напряжение до 400 В, на ток до 1 А.
Тиристор VT1 – на необходимый ток, на обратное напряжение не менее 400 вольт.
В основе схемы — тиристор. Тиристор представляет собой полупроводниковый элемент с тремя выводами: анод, катод, и управляющий электрод. После подачи на управляющий электрод тиристора короткого импульса положительной полярности, тиристор превращается в диод, и начинает проводить ток до тех пор, пока в его цепи этот ток не прервется или не сменит направление.
После прекращения тока или при смене его направления, тиристор закроется и перестанет проводить ток, пока не будет подан следующий короткий импульс на управляющий электрод. Ну а поскольку напряжение в бытовой сети переменное синусоидальное, то каждый период сетевой синусоиды тиристор (в составе данной схемы) станет отрабатывать строго начиная с установленного момента (в установленной фазе), и чем меньше во время каждого периода тиристор будет открыт, тем ниже будут обороты электроинструмента, а чем, соответственно, дольше тиристор будет открыт, тем выше будут обороты.
Ну а поскольку напряжение в бытовой сети переменное синусоидальное, то каждый период сетевой синусоиды тиристор (в составе данной схемы) станет отрабатывать строго начиная с установленного момента (в установленной фазе), и чем меньше во время каждого периода тиристор будет открыт, тем ниже будут обороты электроинструмента, а чем, соответственно, дольше тиристор будет открыт, тем выше будут обороты.
Как видите, принцип прост. Но применительно к электроинструменту с коллекторным двигателем, схема работает хитрее, и об этом мы расскажем далее.
Итак, в сеть здесь включены параллельно: измерительная цепь управления и силовая цепь. Измерительная цепь состоит из постоянного и переменного резисторов R1 и R2, из конденсатора C1, и диода VD1. Для чего нужна эта цепь? Это делитель напряжения. Напряжение с делителя, и что важно, противо-ЭДС с ротора двигателя, складываются в противофазе, и формируют импульс для открывания тиристора. Когда нагрузка постоянна, то и время открытого состояния тиристора постоянно, следовательно обороты стабилизированы и постоянны.
Как только нагрузка на инструмент, и следовательно на двигатель, увеличивается, то величина противо-ЭДС уменьшается, поскольку обороты снижаются, значит сигнал на управляющий электрод тиристора возрастает, и открывание происходит с меньшей задержкой, то есть мощность подводимая к двигателю возрастает, увеличивая упавшие обороты. Так обороты сохраняются постоянными даже под нагрузкой.
В результате совместного действия сигналов от противо-ЭДС и с резистивного делителя, нагрузка не сильно влияет на обороты, а без регулятора это влияние было бы существенным. Таким образом при помощи данной схемы достижима устойчивая регулировка оборотов в каждом положительном полупериоде сетевой синусоиды. При средних и малых скоростях вращения этот эффект более выражен.
Однако, при повышении оборотов, то есть при повышении напряжения, снимаемого с переменного резистора R2, стабильность поддержания скорости постоянной снижается.
Лучше на этот случай предусмотреть шунтирующую кнопку SA1 параллельно тиристору. Функция диодов VD1 и VD2 – обеспечение однополупериодного режима работы регулятора, так как напряжения с делителя и с ротора сравниваются лишь в отсутствие тока через двигатель.
Функция диодов VD1 и VD2 – обеспечение однополупериодного режима работы регулятора, так как напряжения с делителя и с ротора сравниваются лишь в отсутствие тока через двигатель.
Конденсатор C1 расширяет зону регулирования на малых скоростях, а конденсатор C2 снижает чувствительность к помехам от искрения щеток. Тиристор нужен высокочувствительный, чтобы ток менее 100 мкА смог бы его открыть.
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Виды двигателей
Регулятор оборотов с поддержанием мощности – изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар
. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм.
Мотор может быть :- однофазным,
- двухфазным,
- трехфазным.
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее . Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на :
- асинхронные,
- коллекторные.
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах.
Коллекторный двигатель используется очень часто . Его работа проста, так как пропускаемый ток проходит напрямую – из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм . Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
При перегрузке (сверлении большого числа отверстий в бетоне например) у электродрели FIT часто выходит из строя регулятор скорости, совмещённый с кнопкой включения. Для его ремонта необходимо сначала аккуратно разобрать дрель, извлечь из неё регулятор и отключить от него провода, предварительно записав, какой провод к какому контакту подключен.
Для его ремонта необходимо сначала аккуратно разобрать дрель, извлечь из неё регулятор и отключить от него провода, предварительно записав, какой провод к какому контакту подключен.
Разбирается корпус регулятора отгибанием боковин и выводом крышки из фиксаторов, без клея. Надо соблюдать осторожность и неторопливость – там находятся 2 пружинки, которые соскучились по свету и полётам))).
С механикой всё несложно – чистим контакты и промываем спиртом от грязи. Плату со схемой легко вынимаем, предварительно выдвинув из пазов медные квадратики зажимов-контактов. Единственный элемент схемы, который выходит из строя – симистор. Находим его и “обезвреживаем”, выпаяв подходящие к нему проводники (хороним на месте).
От управляющего электрода делаем отвод тонким многожильным проводком (чтобы вместился под крышку) и выводим при сборке в существующее отверстие. Обратная сборка регулятора проблем не составляет (при наличии аккуратности и неторопливости!). От зажимов регулятора (не от фазного) делаем 2 доп. отвода гибким проводом, для подключения симистора. Он становится вынесенным элементом регулятора. (места в ручке, для его расположения, вполне достаточно).
отвода гибким проводом, для подключения симистора. Он становится вынесенным элементом регулятора. (места в ручке, для его расположения, вполне достаточно).
Схема регулятора оборотов дрели
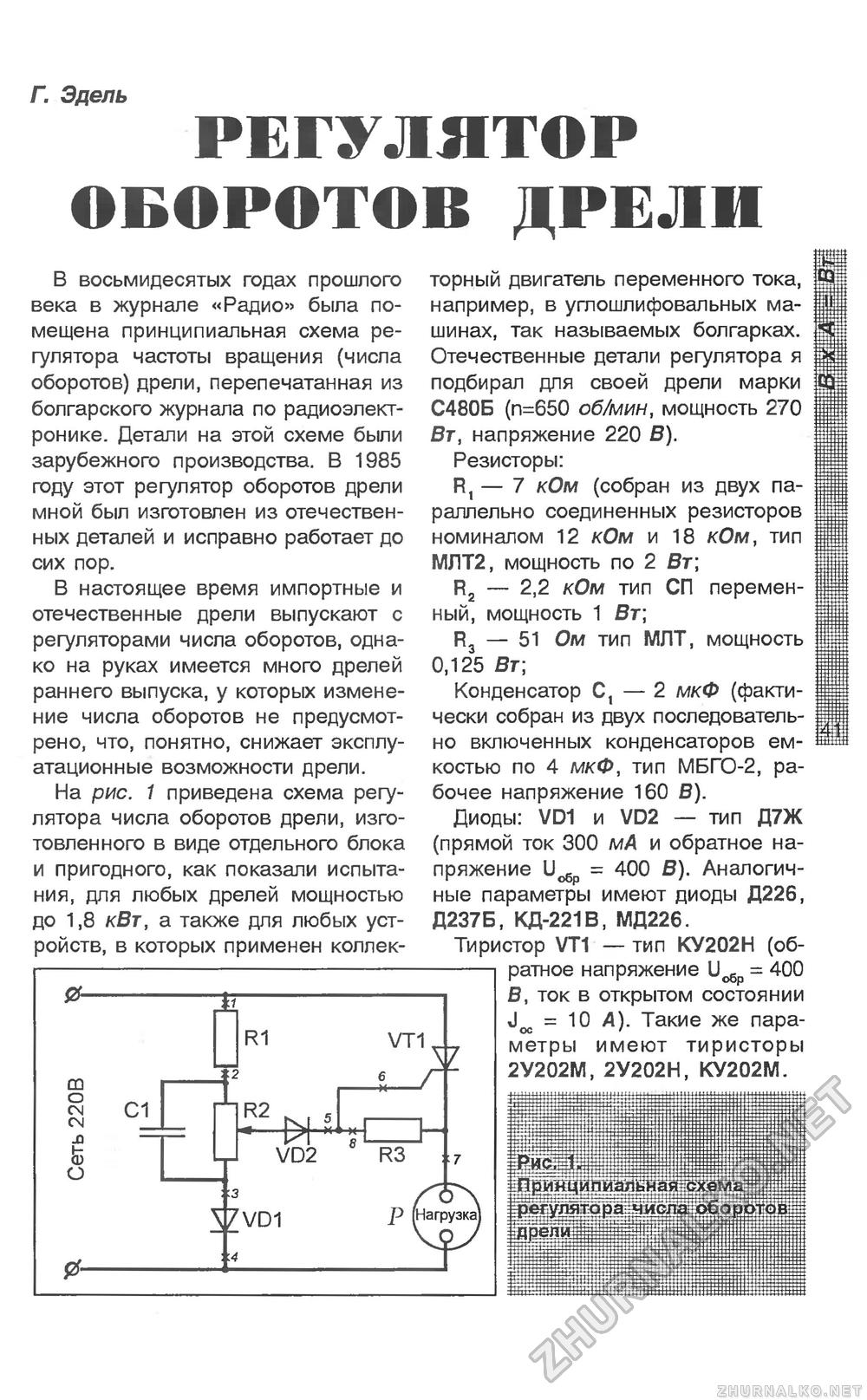
На рисунке ниже рассмотрена схема регулятора оборотов электродвигателя дрели, собранного в облике отдельного наружного блока и подходящего для всех дрелей мощностью до 1,8 кВт, также для других схожих устройств, где употребляется коллекторный движок переменного тока, допустим, в болгарках. Детали регулятора на схеме подобраны для типовой дрели мощностью около 270 Вт, 650 об/мин, напряжение 220В.
Тиристор типа КУ202Н с намерением его обычного остывания смонтирован на радиаторе. Чтоб задать подходящую частоту вращения электродвигателя шнур регулятора подсоединяют в сетевую розетку 220 В, а дрель включают уже туда. Потом, двигая ручку переменного сопротивления R задают требуемые обороты для старенькой дрели.
Представленная схема довольно ординарна для повторения даже начинающим радиолюбителем. Нужные для сборки составляющие и детали дешевы и просто доступны. Рекомендуется сборка конструкции в отдельном коробе с розеткой. Такое устройство можно использовать в роли переноски с типовым регулятором мощности
Нужные для сборки составляющие и детали дешевы и просто доступны. Рекомендуется сборка конструкции в отдельном коробе с розеткой. Такое устройство можно использовать в роли переноски с типовым регулятором мощности
Читайте так же
Механизм работы этой радиолюбительской самоделки последующий, когда нагрузка маленькая, то ток течет небольшой, как только нагрузка растет, обороты плавненько увеличиваются.
ЧАСТОТНИК/
РЕГУЛЯТОР ОБОРОТОВ БЕЗ ПОТЕРИ МОЩНОСТИчастотник, с целью повышения и уменьшения оборотов , без потери мощности . ХОЧЕШЬ ТАКОЙ ЖЕ? ПОКУПАЙ ПРЯМО.
Регулятор оборотов для дрели, УШМ, электро рубанка и тд.Регулятор оборотов для дрели который мне обошелся чуть больше доллара.
Читайте так же
Микросборку LM317 требуется установить на радиатор. Диоды 1N4007 можно заменить на аналогичные рассчитанные на ток не ниже 1А. Печатная плата сделана на одностороннем стеклотекстолите. Сопротивление R5 мощностью не ниже 2Вт, или проволочное.
Сопротивление R5 мощностью не ниже 2Вт, или проволочное.
Источник питания на напряжение 12В должен иметь небольшой запас по току. Резистором R1 задаем необходимую частоту вращения на холостом ходу. Сопротивление R2 необходимо для установки чувствительности по отношению к нагрузке, им задается требуемый момент увеличения числа оборотов микродрели. Если увеличить емкость C4, то растет время задержки высоких оборотов.
Представленная ниже схема позволяет собрать очень простой, дешевый и полезный регулятор скорости вращения 12-вольтной микродрели для сверления отверстий в печатных платах в радиолюбительской практике.
Микросборка LM555 используется в роли широтно-импульсного модулятора. Питающее напряжение для ШИМ понижается и стабилизируется с помощью микросхемы LM7805). Прецизионный подстроечный резистор P1 на 50 КОм позволяет регулировать скорость вращения дрели. Полевой транзистор IRL530N применяется в роли выходного приводного элемента и может коммутировать ток до 27А. Кроме того он обладает быстрым временем переключения и малым сопротивлением. Диод 1N4007 нужен для защиты от ЭДС противодействия. В качестве альтернативы можно взять диод Шоттки MBR1645.
Кроме того он обладает быстрым временем переключения и малым сопротивлением. Диод 1N4007 нужен для защиты от ЭДС противодействия. В качестве альтернативы можно взять диод Шоттки MBR1645.
ШИМ (широтно-импульсная модуляция), используемая в этой конструкции, является эффективным методом изменения скорости и мощности для всех двигателей постоянного тока.
Читайте так же
Дрель интерскол ду 750эр смена кнопки У современных электронных ручных дрелей пусковая кнопка отвечает не только лишь за коммутацию электропитания соблюдая принцип «вкл-выкл» и «вперёд-назад», однако обеспечивает плавную регулировку мощности (скорости вращения патрона) зависимо от силы нажима на кнопку. Напротив у инструмен…
Полируем автомобиль с помощью дрели или болгарки (используя насадки)
Видя ухоженный автомобиль, переливающийся блеском, прохожие одобрительно кивают, а владелец испытывает гордость не удовлетворение. В связи с этим некоторые автомобилисты тщательно следят за обликом своего железного «друга». Полировка кузова – та самая процедура, что пр…
Полировка кузова – та самая процедура, что пр…
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателяСамый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.

Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
 Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Регулятор оборотов с обратной связью по скорости , токовой отсечкой и плавным запуском для универсального коллекторного двигателя. – Электропривод
Привет всем.В этой теме я расскажу про регулятор оборотов с обратной связью по скорости , токовой отсечкой и плавным запуском для универсального коллекторного двигателя или двигателя постоянного тока.Получилось подобие сервопривода.Схема подойдет не только для доработки мини-дрели , но и как блок управления коллекторным двигателем для небольших китайских станков, вместо штатной платы.
У меня была тема в законченных проэктах про сверлильное приспособление для часового токарного станка Т-28 на основе китайской мини-дрели Hilda.
Все отлично работало,насверлил кучу отверстий сверлами 1.2 мм и меньше.Но вот срочно понадобилось сверлить сверлами диаметром 3-4 мм.И здесь штатный регулятор оборотов перестал справляться со своей задачей.Я решил собрать нормальный регулятор.
Пару лет назад я за несколько дней придумал и собрал для постоянного клиента блок управления крупным универсальным коллекторным двигателем, который крутил шнек на немецком экструдере на производстве пластикового профиля.Родной блок выгорел после залития водой из лопнувшей трубы.Этот блок не только спас клиенту горящий заказ но и оказался надежнее и удобнее родного.Там их уже 4 штуки работает и ничего пока не ломалось.
Я решил для сверлильного приспособления просто выкинуть все лишнее из блока управления движком экструдера-схема вышла удачная, зачем второй раз велосипед изобретать.
Сразу предупреждаю, что блок управления был собран в основном из радиодеталей конца СССР, которых у меня схабарено с забросок в виде разных ЗИП ов просто огромное колличество.И оно все растет!Покупать и изобретать что то крутое и современное было некогда-у клиента горел заказ, о чем он был предупрежден само собой.
Этот регулятор оборотов то же на устаревшей элементной базе, но никто не мешает повторить этот принцип на чем угодно , если кто то ненавидит старую элементную базу.Мне иногда наоборот нравится немного онанизма со старыми радиодеталями.
Вот схема:
Немного про то, как оно работает:
То, что обведено пунктиром-находится непосредственно в корпусе мини-дрели.Это оптический датчик оборотов из инфракрасных фототранзистора и светодиода.Вместо диска с отверстиями или темными-светлыми участками используются лопасти вентилятора.Со специальным диском с большим колличеством отверстий было бы лучше -но в данном случае его некуда поставить.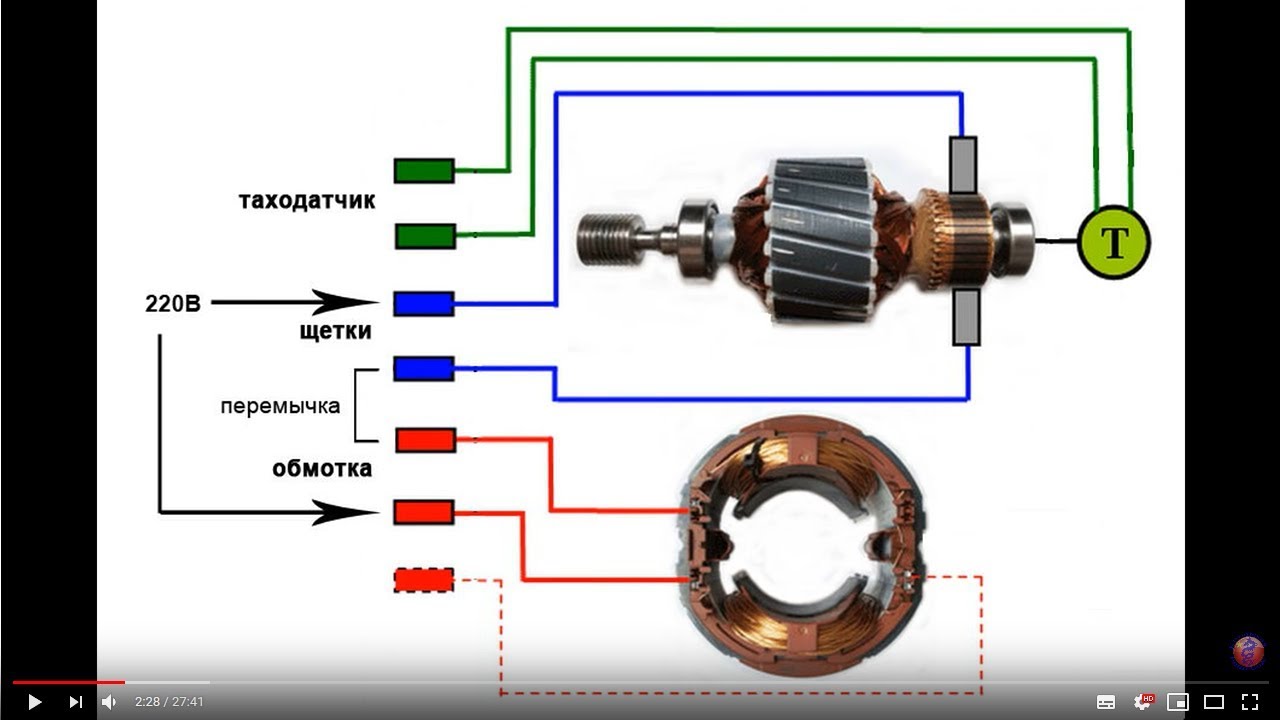 VT13-усилитель сигнала фоторанзистора.С самим регулятором он связан экранированным кабелем.
VT13-усилитель сигнала фоторанзистора.С самим регулятором он связан экранированным кабелем.
На элементах TV1,VDS1, DA1 и то что рядом с ними собран стабилизированный источник питания 12 вольт.Выключатель SA2 включает -выключает двигатель сверлилки.Вентилятор работает все время.
На транзисторах VT1-VT2 собран датчик перехода напряжения через ноль.На конденсаторе С6 имеем подобие “пилы”.
Транзистор VT3-буферный каскад для “пилы”.
Резистором R5 задается минимальная скорость вращения.
Транзистор VT4-каскад сравнения.На базу подается “пила” на эмитер-напряжение пропорциональное скорости вращения.
VT5- ключ, разрешающий работу блокинг-генератора на транзисторе VT6.Он вырабатывает пачки импульсов управления , которые через импульсный трансформатор TV2 поступают на управляющий электрод тиристора.
На диодах VD5-VD6 и элементах рядом с ними собран преобразователь частоты импульсов с датчика скорости в напряжение пропорциональное скорости. Обращаю внимание на конденсатор С13.Его емкость тем меньше, чем больше отверстий в диске-датчике скорости.А чем больше отверстий -тем более линейную регулировку имеем.
Обращаю внимание на конденсатор С13.Его емкость тем меньше, чем больше отверстий в диске-датчике скорости.А чем больше отверстий -тем более линейную регулировку имеем.
VT7-буферный каскад , на его выходе резистор R16-регулятор скорости.
Транзистор VT8 обеспечивает плавный разгон двигателя.Время разгона можно корректировать емкостью конденсатора С15.Диоды VD7-VD8 для его быстрой разрядки при отключении питания и повторном запуске.
Трансформатор тока TA1- датчик тока.Напряжение с него подается на R25 , которым регулируется чувствительность защиты по току.Потом напряжение выпрямляется VD10 и поступает на тригер на транзисторах VT10-VT11.При заклинивании или перегрузке тригер переключается, загорается светодиод HL3 -“авария” и ключевой транзистор VT9 , блокирует импульсы управления на тиристор.Перезапуск -выключением питания SA2.Конденсатор С17 определяет небольшую задержку на срабатывание токовой отсечки.
Трансформатор TV1-любой малогабаритный на 12 вольт. Трансформатор TA1-трансформатор тока самодельный.Можно использовать что угодно с готовой вторичной обмоткой , добавив первичную.
Трансформатор TA1-трансформатор тока самодельный.Можно использовать что угодно с готовой вторичной обмоткой , добавив первичную.
Импульсный трансформатор самодельный или любой промышленный из плат с тиристорами.
Дроссель L1 для подавления помех, самодельный или подходящий по току от импульсных блоков питания.
Силовая часть схемы не содержит ничего интересного.Элементы взяты с запасом по току.Варистор VDR1 и C11-R11 гасят выбросы напряжения в переходных режимах работы электродвигателя.
Колличество транзисторов и вспомоготельных элементов завышено.Но зато схема начинает работать сразу, после сборки.Не надо подбирать режимы, чем грешило большинство схем из “Радио”.
Транзисторы-любые маломощные , не принципиально.На месте VT6-средней мощности.
А теперь немного фоток, как я запихал оптопару в мини дрель.
Вот мини дрель в разборе
А вот оптопара от какой то оргтехники
Пилим ее пополам и немного обточим напильником
В корпусе мини-дрели вырезаем два окна для крепления оптопары
Части оптопары сажаем на кусочек макетной платы
Вставляем ротор на место и потом оптопару , теперь она смотрит через вентилятор
Закрываем крышечкой
Делаем крепление для вентилятора
Собираем на кусочке макетной платы усилитель оптопары
И собираем все-понятно из фоток
А вот разводить плату мне было лень!Если кто то это сделает и выложит-да еще возможно на СМД шках-тому респект!Я как в радиолюбительской юности быстро нарезал площадки на куске стеклотекстолита и собран аккуратно навесным монтажем
Корпус по быстрому согнул из оцинковки-а то уже сверлить пора
Корпус без вентиляции-там почти ничего не греется, а попадание стружки не входит в наши планы.
И вот оно в готовом виде.
А вот так оно теперь выглядит на станке
Результат меня полностью устроил.Отлично сверлит , скорость не проседает, при изменении нагрузки.Учитывая что это мини-дрель и часовой станок -сверло 5мм по стали в легкую.Если сверло все же заклинило-срабатывает токовая отсечка.За счет компьютерного вентилятора, который работает и в паузах между сверлениями, двигатель не перегревается.А уж плавный запуск-это просто приятно.Скорость регулируется визуально от оборотов 300- для мелких сверл меньше не надо.Можно бы сделать почти от нуля, но тогда в качестве датчика уже не пойдут лопасти вентилятора-будет нужен диск с отверстиями или прорезями с несколькими десятками отверстий.Подойдет и готовый узел от например принтера.
Если у этого регулятора усилить силовую часть схемы-он вполне справится и с гораздо более крупными электромоторами типа стиралочного и крупнее.Возможен вариант и без диодного моста в силовой части -с двумя встречно включенными тиристорами.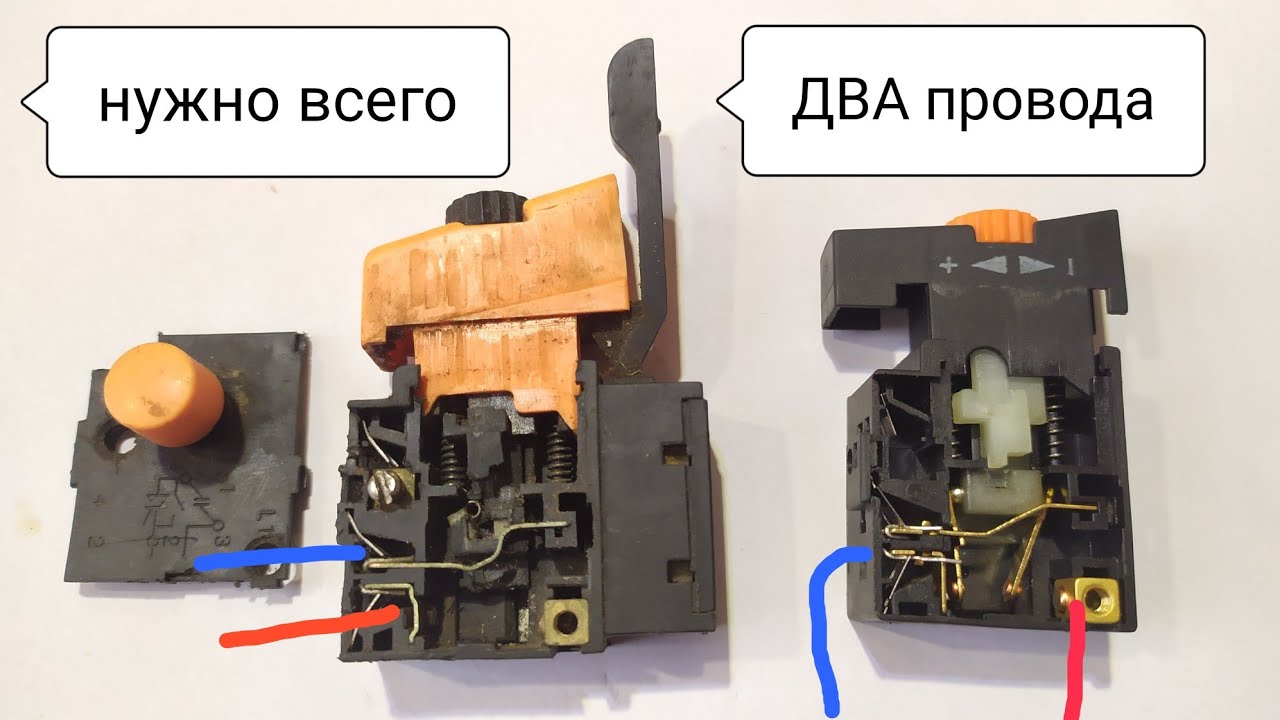 Только добавить еще одну обмотку к импульсному трансформатору.
Только добавить еще одну обмотку к импульсному трансформатору.
При небольшой доработке схема будет работать вместо оптического датчика с тахогенератором.
Заранее приношу извинения, если где то в описании перепутал обозначения деталей.Но на самой схеме все точно-проверял многократно.
Регулятор Оборотов Дрели [Строительные инструменты]
Из дрели при помощи дополнительных устройств можно сделать различные приспособления, которые будут заменять различные станки, такие как сверлильный, токарный, шлифовальный и другие. Но если у станков из дрели нет возможности регулировать частоту вращения, то работать на них будет не очень удобно.
Современные дрели часто снабжены регулятором оборотов в виде курка. В этом случаи частота вращения зависит от степени нажатия. При этом фиксатор курка, фиксирует курок при выбранной частоте вращения далеко не во всех моделях дрелей, а фиксирует курок только при максимальном нажатии, то есть при максимальных оборотах, что может свести на нет такой регулятор оборотов. Еще один недостаток встроенного регулятора в том, что когда дрель вставлена в какое либо устройство, она может находится в таком положении, при котором пользоваться регулятором оборотов неудобно, даже если в нем отсутствуют другие недостатки.
Еще один недостаток встроенного регулятора в том, что когда дрель вставлена в какое либо устройство, она может находится в таком положении, при котором пользоваться регулятором оборотов неудобно, даже если в нем отсутствуют другие недостатки.
Для станков из дрели удобнее пользоваться выносным регулятором в котором исключены недостатки описанные выше. Можно сделать такой регулятор из диммера (регулятора освещения) и розетки. Принципиальная схема такого регулятора следующая:
Исполнение этой схемы может быть различным. Мы приведем два варианта, не самых лучших с точки зрения безопасности. Конечно же регулятор должен быть сделан так чтобы внутренняя часть была закрыта со всех сторон, а не так как сделано на рисунках.
Пользоваться таким регулятором частоты вращения очень удобно, вилка регулятора вставляется в розетку сети, а вилка дрели в розетку регулятора. Курок дрели фиксируется в нажатом до предела положении, а частота вращения управляется поворотом ручки диммера. Только необходимо чтобы мощность дрели не превышала мощности диммера. Такой регулятор можно использовать не только для регулирования частоты вращения но и для управления нагревом паяльника или кипятильника.
Только необходимо чтобы мощность дрели не превышала мощности диммера. Такой регулятор можно использовать не только для регулирования частоты вращения но и для управления нагревом паяльника или кипятильника.
Источник: tool-land.ru
Рассказать о статье
Схема подключения кнопки дрели для проведения ее замены
Схема подключения кнопки дрели для ее замены
Если по каким-то причинам дрель перестает функционировать, необходимо разобраться, в чем причина. Первым делом следует проверить, есть ли напряжение в удлинителе и розетке.
Сделать это можно однополюсным индикатором, он покажет лишь фазу, но если обрыв случился на нулевом проводе, то он будет бесполезным.
Самый простой способ – это включить другой электроприбор в тот же удлинитель и ту же розетку и тем самым проверить их рабочее состояние.
Проверить кнопку дрели лучше всего с помощью омметра или тестера по ее схеме.
 Подключаем прибор к контактам на вилке, прибор при этом не реагирует, ведь кнопка пуска не находится в рабочем положении. После того, как ее нажмете, прибор покажет или звуковым сигналом оповестит о том, целая схема или поврежденная. Если причина в кнопке, то рассмотрим устройство кнопки дрели и ее ремонт.
Подключаем прибор к контактам на вилке, прибор при этом не реагирует, ведь кнопка пуска не находится в рабочем положении. После того, как ее нажмете, прибор покажет или звуковым сигналом оповестит о том, целая схема или поврежденная. Если причина в кнопке, то рассмотрим устройство кнопки дрели и ее ремонт.Для проверки кнопки не всегда достаточно тестера. Связано это с тем, что большинство кнопок имеют плавную регулировку скорости вращения, поэтому простой тестер делает их проверку не корректно. Для правильной проверки придется использовать специальную схему.
Зачастую в дрели один провод присоединяется к одной клемме. Поэтому с одновременным нажатием на кнопку делается прозвонка всех клемм.
Если при этом лампочка загорается, то с кнопкой все в порядке, если же нет, то самый простой способ устранить неисправность – это заменить ее.
Делая замену, необходимо учитывать, что схема бывает обыкновенной и с реверсом. В связи с этим замена кнопки дрели должна проводиться сугубо по схеме.

Необходимо обратить внимание на то, что она должна подходить по размерам, что само собой разумеется, а также соответствовать мощности дрели.
Подсчитать необходимую мощность достаточно просто: например, мощность инструмента составляет 650 Вт, используем формулу P=U*I и получаем I = 650/220 = 2.94 А. Значит, нам понадобится кнопка на 2.95 А для нашей дрели.
Ремонт кнопки дрели – достаточно сложный процесс, он требует наличия определенных навыков. Необходимо понимать, что при открытии корпуса многие детали просто выпадут из него. Чтобы избежать этого, плавно поднимайте крышку и отмечайте расположение всех деталей. Разбирается и ремонтируется кнопка в следующем порядке:
- Подцепляются фиксаторы защитного кожуха, и он стягивается;
- Все почерневшие клеммы с помощью спирта или наждачки с мелким зерном очищаются от нагара;
- Далее все снова собирается, и, если работа не восстановлена, то происходит замена;
- Регулятор оборотов полностью заливается компаундом, поэтому, если он вышел из строя, его необходимо только менять;
- Еще одна частая поломка – это стирание рабочего слоя под ползунком реостата. Ремонтировать его не имеет смысла, поэтому проще заменить кнопку целиком.
 Ремонтировать его не имеет смысла, поэтому проще заменить кнопку целиком.
Ремонтировать его не имеет смысла, поэтому проще заменить кнопку целиком.Для того чтобы знать, как подключить кнопку дрели, необходимо проводить работу по схеме, которая должна быть в наличии у инструмента. Если таковой не имеется, то нужно найти ее в интернете.
Только с ее помощью можно выполнить ремонт и подключение быстро и правильно.
Совет! Регулятор оборотов и управление реверсом находятся в разных корпусах, потому их проверять нужно по отдельности.
Как Подключить Дрель Напрямую Без Кнопки
Схема подключения кнопки дрели – чиним инструмент сами!
Необходимые инструменты и материалы
Ремонт дрели можно проводить не своими руками, главное, знать предпосылки поломок не способы их «лечения». Сейчас вы узнаете что, как смотрится схема подключения кнопки дрели, не обойдем вниманием не другие неисправности, из-за этого для вас придется являться счастливым владельцем работающего инструмента.
Возможные неисправности инструмента – проводим ремонт сами
Если ваш инструмент стал работать ужаснее, по другому совсем не стал делать свои прямые обязанности, пора диагностировать неисправности не попытаться имея его совладать. Поначалу проверяем провод на предмет наличия повреждений не напряжение в розетке, с какой целью туда можно включить хоть какое другое устройство – телек по другому говоря чайник.
Если вы осматриваете устройства, работающие от аккума, их необходимо проверить с внедрением тестера – тогда напряжение, обозначенное на корпусе, обязано иметь аналогичное значение с напряжением аккума.
Если напряжение меньше, придется поменять батареи на новые. Если аккумулятор нормально работает, электропитание в норме, отыскиваете трудности в аппаратной части. Самоделки из двигателя от стиральной машины: 1. Как подключить двигатель от старой стиральной машины через конденсатор или без него. Самыми частыми поломками считают:
- Препядствия со службой мотора;
- Износ щеток;
- Трудности со службой кнопки.

Зная, как происходит подключение кнопки электродрели, естественно стремительно решить неисправность. Уже сейчас, неувязка со службой дрели может появляться не из-за запыленности инструмента, ведь дрель «берет» не дерево, не кирпич, не другие материалы.
А это значит, для вас похлопочите о том, чтоб очищать устройство после каждого использования – только так можно понизить риск сбоев при работе из-за с загрязненностью инструмента.
Конкретно поэтому когда вы провели ремонт в квартире, сразу чистите дрель.
Схема подключения
кнопки дрели – как исправить проблему?К сожалению, чтобы проверить работоспособность инструмента, вам будет недостаточно тестера, что связано с тем, что большая часть кнопок устройства оснащены плавной регулировкой скорости, а потому обычный тестер может дать вам некорректные данные.
В данном случае вам понадобится специальная схема подключения кнопки дрели. Часто в инструментах один провод соединен с клеммой, а потому одновременное нажатие на кнопку приводит к прозвону клемм.
В том случае, если лампочка загорелась, с кнопкой все хорошо, а вот если вы замечаете неисправность – пришло время заменять кнопку.
Осуществляя замену, учитывайте, что схема может быть как простой, так и с реверсом. За счет этого проводить все работы по замене кнопки нужно исключительно по схеме, ничего не добавляя «от себя».
Так, деталь должна подходить по размеру и соответствовать мощности инструмента. При этом подсчет мощности – достаточно простое занятие. Используем формулу P=UI (с учетом, что мощность дрели равна 650 Вт), I = 2.
94 А (650/220), а значит, и кнопка должна быть на 2.95 А.
Подключение кнопки дрели
Смотри продолжение , то что не показано на этом видео: Подключение
Подсоединение кнопки пуск дрели
Схема соединения.
Как
подключить кнопку дрели самостоятельно?Несмотря на то, что процесс этот является достаточно сложным, вы можете всю работу провести своими руками, соблюдая некоторые важные правила.
Например, помните, что открытие корпуса может привести к тому, что все детали и плохо закрепленные запчасти просто выпадут из корпуса. Естественно, этого следует избежать, ведь потом будет достаточно сложно собрать устройство воедино.
Для этого можно плавно поднять крышку, отметив точное расположение запчастей на бумаге.
Кнопка ремонтируется следующим образом:

Многих интересует, где взять подобную схему? Прежде всего, она должна идти вместе с инструментом при его покупке, однако если схемы нет, либо вы ее утеряли, придется поискать в интернете.
Ведь только с ее помощью вы сможете провести ремонт грамотно, без ошибок.
К слову, кнопка регулятора оборотов и кнопка реверсного управления расположены в разных местах, а потому и проверять их придется по отдельности.
Проверка электродвигателя: причины поломок и ремонт
Существует несколько причин поломок якоря или статора дрели. Прежде всего, это неграмотная эксплуатация устройства. Например, многие пользователи просто перегружают инструмент, осуществляя работу без перерыва. Это приводит к тому, что двигатель дрели не успевает «отдохнуть».
Вторая причина кроется в плохом моточном проводе, которые часто встречаются в дешевых моделях. Именно потому поломки дешевых инструментов встречаются значительно чаще. Ремонт в этом случае нужно проводить с использованием специализированного инструмента.
И будет лучше, если вы доверите эту работу профессиональным специалистам.
Однако если было решено осуществить ремонт своими силами, у вас обязательно возникнет вопрос – как всё сделать правильно? Как вы уже поняли, электрическая дрель «страдает» поломками якоря и статора, и проверить это можно несколькими признаками, например, когда при работе инструмент вдруг искрит. Если же «ярких» признаков нет, можете воспользоваться омметром.
Статор меняют так:
Как заменить щетки: работа за пару минут
Но дрель может не работать и из-за банальных неисправностей – например, из-за щеток внутри двигателя. А значит, без ремонта щеток здесь не обойтись, при этом работа эта достаточно простая – вам даже не нужно обладать специальными знаниями и инструментами.
Для этого разбираем устройство, извлекаем из него щеткодержатели и меняем детали, которые поломаны.
К слову, существуют модели, корпус которых можно не разбирать – в них нужно просто удалить специальные заглушки через установочное окошко, после чего сменяем щетки.
Приобрести эти детали можно в любом строительном магазине, есть также и некоторые модели, которые продаются вместе с комплектом дополнительных щеток. Важно, чтобы вы не дожидались полного износа щеток – проверяйте их время от времени.
А все за счет того, что возникает риск образования зазора между щетиной и коллектором.
В итоге эта деталь начнет перегреваться и со временем отпадет – значит, вам придется менять целый якорь, что выйдет значительно дороже и сложнее, и не факт, что вы сможете самостоятельно решить этот вопрос.
Как видите, существуют разнообразные поломки, многие из которых будут подвластны вам, другие будут посильны только специалистам в сервисных центрах. Самоделки из двигателя от стиральной машины: 1.
Как подключить двигатель от старой стиральной машины через конденсатор или без него. И чтобы снизить риск таких поломок, нужно заботиться о своем инструменте, чистить его после работы, проверять состояние деталей и щеток, чтобы вовремя заменить их на новые.
И чтобы снизить риск таких поломок, нужно заботиться о своем инструменте, чистить его после работы, проверять состояние деталей и щеток, чтобы вовремя заменить их на новые.
Однако если видите, что сами справиться не сможете – несите устройство в мастерскую.
Ремонт кнопки EN61058 электродрели Интерскол ДУ-13/780ЭР
У современных электрических ручных дрелей пусковая кнопка отвечает не только за коммутацию электропитания по принципу «вкл-выкл» и «вперёд-назад», но также обеспечивает плавную регулировку мощности (скорости вращения патрона) в зависимости от силы нажима на кнопку. Если же у инструмента эта важная функция вдруг исчезла, и дрель стала работать только на полных оборотах, то существует два решения: заменить кнопку целиком на новую, или же вскрыть сгоревшую кнопку и попытаться её отремонтировать.
Немного теории
В конструкции кнопки лежит принцип регулировки мощности путём урезания некоторой части синусоиды переменного напряжения питания, подводимого на электродвигатель дрели.
Чем глубже утапливается кнопка, тем более полно выглядит график синусоиды. И наоборот, при минимальном нажатии на кнопку, двигатель получает питание наиболее фрагментарно.
В упрощённом варианте, схема кнопки электродрели выглядит следующим образом.
Силовым регулирующим элементом служит тиристор VS1, разрывающий собою цепь питания нагрузки. В цепь управляющего электрода тиристора последовательно включен динистор VD1, обладающий свойством пропускать ток только при определенном диапазоне разности потенциалов между своими электродами.
Конденсатор C1, заряжаемый через переменный резистор R1, обеспечит эту разность потенциалов тем быстрее, чем левее по схеме находится движок переменного резистора и, следовательно, тем на более длительное время откроется тиристор, и тем бОльшая мощность будет подведена к нагрузке в данный полупериод напряжения.
Зависимость напряжения на нагрузке от времени. А – полная мощность (нет регулирования, включение без регулятора). Б – мощность около 25%. В – мощность менее 25%.
Один полупериод (нижний по графику) синусоиды, при проходе тока через тиристор, полностью срезается. Чтобы этого не происходило, встречно-параллельно тиристору нужно включить диод.
Поиск и устранение неисправностей
Вскрытие кнопки EN61058 не представляет труда, необходимо кончиком ножа отодвинуть пластиковые защелки и достать изнутри контактную группу вместе с электронной платой. Далее, необходимо отделить плату, отпаять её от контактной группы.
Вместо переменного резистора, в кнопке применен более надёжный вариант — ступенчатый резистор, представляющий собой многопозиционный переключатель, где сопротивлению каждой позиции соответствует свой постоянный резистор.
Помимо множества smd-резисторов, на плате присутствует конденсатор, диод и подстроечный резистор. Монтаж тиристора TYN612 и динистора DB3 выполнен навесным способом.
Наиболее вероятная причина неисправности кнопки, когда она не регулирует обороты (мощность) дрели – неисправность тиристора. Если нет возможности проверить тиристор на специализированном тестере, то тиристор нужно просто заменить на заведомо исправный.
Тоже самое относится и к динистору. Всё остальное: резисторы, диод и конденсатор, – можно проверить прямо на плате обычным мультиметром (после выпаивания тиристора).
Если у мультиметра нет функции измерения ёмкости, то проверять конденсатор нет особой необходимости, так как вероятность выхода его из строя крайне мала.
Кнопка дрели отремонтирована путём замены вышедшего из строя тиристора TYN612 на аналогичный BT151. Крепление тиристора осуществлено винтом и гайкой с применением термопасты. Чтобы гайка вошла в корпус, его пришлось немного подрезать.
Схема подключения кнопки дрели – чиним инструмент сами! – Можно ли самому сделать
Ремонт дрели можно проводить и своими силами, главное, знать причины поломок и методы их «лечения». Сегодня мы расскажем о том, как выглядит схема подключения кнопки дрели, не обойдем вниманием и другие неисправности, благодаря чему вы будете являться счастливым обладателем работающего инструмента.
Сегодня мы расскажем о том, как выглядит схема подключения кнопки дрели, не обойдем вниманием и другие неисправности, благодаря чему вы будете являться счастливым обладателем работающего инструмента.
Содержание
1 Возможные неисправности инструмента – проводим ремонт сами
Если ваш инструмент стал работать хуже, или вовсе перестал выполнять свои прямые обязанности, пришло время диагностировать неисправности и постараться с ними справиться. Сначала проверяем провод на наличие повреждений и напряжение в розетке, для чего в нее можно включить любое другое устройство – телевизор или чайник.
Если вы осматриваете устройства, работающие от аккумулятора, их нужно проверить при использовании тестера – в этом случае напряжение, указанное на корпусе, должно иметь аналогичное значение с напряжением аккумулятора.
Если напряжение меньше, придется менять аккумуляторы на новые. Если аккумулятор нормально работает, электропитание в норме, ищите проблемы в аппаратной части. Самыми частыми поломками считают:
- Проблемы с работой двигателя;
- Износ щеток;
- Проблемы с работой кнопки.
Зная, как происходит подключение кнопки электродрели, можно быстро решить неисправность. Кроме того, проблема с работой дрели может возникать и из-за запыленности инструмента, ведь дрель «берет» и дерево, и кирпич, и другие материалы.
А значит, вам следует позаботиться о том, чтобы очищать устройство после каждого использования – только так можно снизить риск сбоев в работе в связи с загрязненностью инструмента.
Именно потому после того, как вы провели ремонт в квартире, сразу же чистите дрель.
2 Схема подключения кнопки дрели – как исправить проблему?
К сожалению, чтобы проверить работоспособность инструмента, вам будет недостаточно тестера, что связано с тем, что большая часть кнопок устройства оснащены плавной регулировкой скорости, а потому обычный тестер может дать вам некорректные данные.
В данном случае вам понадобится специальная схема подключения кнопки дрели. Часто в инструментах один провод соединен с клеммой, а потому одновременное нажатие на кнопку приводит к прозвону клемм.
В том случае, если лампочка загорелась, с кнопкой все хорошо, а вот если вы замечаете неисправность – пришло время заменять кнопку.
Осуществляя замену, учитывайте, что схема может быть как простой, так и с реверсом. За счет этого проводить все работы по замене кнопки нужно исключительно по схеме, ничего не добавляя «от себя».
Так, деталь должна подходить по размеру и соответствовать мощности инструмента. При этом подсчет мощности – достаточно простое занятие. Используем формулу P=U*I (с учетом, что мощность дрели равна 650 Вт), I = 2.
94 А (650/220), а значит, и кнопка должна быть на 2.95 А.
3 Как подключить кнопку дрели самостоятельно?
Несмотря на то, что процесс этот является достаточно сложным, вы можете всю работу провести своими руками, соблюдая некоторые важные правила.
Например, помните, что открытие корпуса может привести к тому, что все детали и плохо закрепленные запчасти просто выпадут из корпуса. Естественно, этого следует избежать, ведь потом будет достаточно сложно собрать устройство воедино.
Для этого можно плавно поднять крышку, отметив точное расположение запчастей на бумаге.
Кнопка ремонтируется следующим образом:

Многих интересует, где взять подобную схему? Прежде всего, она должна идти вместе с инструментом при его покупке, однако если схемы нет, либо вы ее утеряли, придется поискать в интернете.
Ведь только с ее помощью вы сможете провести ремонт грамотно, без ошибок.
К слову, кнопка регулятора оборотов и кнопка реверсного управления расположены в разных местах, а потому и проверять их придется по отдельности.
4 Проверка электродвигателя: причины поломок и ремонт
Существует несколько причин поломок якоря или статора дрели. Прежде всего, это неграмотная эксплуатация устройства. Например, многие пользователи просто перегружают инструмент, осуществляя работу без перерыва. Это приводит к тому, что двигатель дрели не успевает «отдохнуть».
Вторая причина кроется в плохом моточном проводе, которые часто встречаются в дешевых моделях. Именно потому поломки дешевых инструментов встречаются значительно чаще. Ремонт в этом случае нужно проводить с использованием специализированного инструмента.
Именно потому поломки дешевых инструментов встречаются значительно чаще. Ремонт в этом случае нужно проводить с использованием специализированного инструмента.
И будет лучше, если вы доверите эту работу профессиональным специалистам.
Однако если было решено осуществить ремонт своими силами, у вас обязательно возникнет вопрос – как всё сделать правильно? Как вы уже поняли, электрическая дрель «страдает» поломками якоря и статора, и проверить это можно несколькими признаками, например, когда при работе инструмент вдруг искрит. Если же «ярких» признаков нет, можете воспользоваться омметром.
Статор меняют так:
5 Как заменить щетки: работа за пару минут
Но дрель может не работать и из-за банальных неисправностей – например, из-за щеток внутри двигателя. А значит, без ремонта щеток здесь не обойтись, при этом работа эта достаточно простая – вам даже не нужно обладать специальными знаниями и инструментами.
Для этого разбираем устройство, извлекаем из него щеткодержатели и меняем детали, которые поломаны.
К слову, существуют модели, корпус которых можно не разбирать – в них нужно просто удалить специальные заглушки через установочное окошко, после чего сменяем щетки.
Приобрести эти детали можно в любом строительном магазине, есть также и некоторые модели, которые продаются вместе с комплектом дополнительных щеток. Важно, чтобы вы не дожидались полного износа щеток – проверяйте их время от времени.
А все за счет того, что возникает риск образования зазора между щетиной и коллектором.
В итоге эта деталь начнет перегреваться и со временем отпадет – значит, вам придется менять целый якорь, что выйдет значительно дороже и сложнее, и не факт, что вы сможете самостоятельно решить этот вопрос.
Как видите, существуют разнообразные поломки, многие из которых будут подвластны вам, другие будут посильны только специалистам в сервисных центрах.
И чтобы снизить риск таких поломок, нужно заботиться о своем инструменте, чистить его после работы, проверять состояние деталей и щеток, чтобы вовремя заменить их на новые.
Однако если видите, что сами справиться не сможете – несите устройство в мастерскую.
Подключение кнопки дрели
Многих пользователей электродрелей может рано или поздно начать интересовать вопрос, каким образом осуществляется подключение кнопки дрели к проводке инструмента. Появляется такой вопрос обычно при возникновении неисправностей в старой кнопке, из-за чего требуется подключить новую. В этой статье я расскажу, как ее следует подключать — что куда втыкается.
Я не буду здесь описывать, как разобрать корпус электродрели, чтобы добраться до внутренностей, так как предполагаю, что раз уж вы задались вопросом замены, то разборка корпуса для вас не составит труда. Я думаю, что тот, кто не знает как разобрать корпус, даже не станет задумываться о самостоятельной замене чего-либо в инструменте.
Итак, для начала следует приобрести новую кнопку. Она должна совпадать со старой по размерам и мощностным характеристикам, поэтому, идя за покупкой, захватите ее с собой для образца и запишите точную модель вашего инструмента.
Как отсоединить старую кнопку?
Для ее отсоединения понадобится тонкая шлицевая (прямая) отвертка и булавка. Отверткой откручиваем имеющиеся болты, которые зажимают кабеля, идущие от сетевой вилки.
Огромный выбор электроинструмента и бензотехники по низким ценам. Бесплатная доставка до вашего региона. Оплата при получении либо онлайн.
Остальные провода закреплены пружинным зажимом. Для их отсоединения нужно в углубление, где находится клемма, продеть острие булавки. Благодаря такому действию происходит расжатие клеммы и провод вынимается вместе с булавкой.
При отсоединении советую вам оставить на месте провода, идущие от конденсатора, чтобы не забыть, к каким контактам он крепится. Поскольку он кроме как к клеммам кнопки больше никуда не прикреплен, их можно извлечь вместе и в таком виде нести в магазин, чтобы купить новый экземпляр.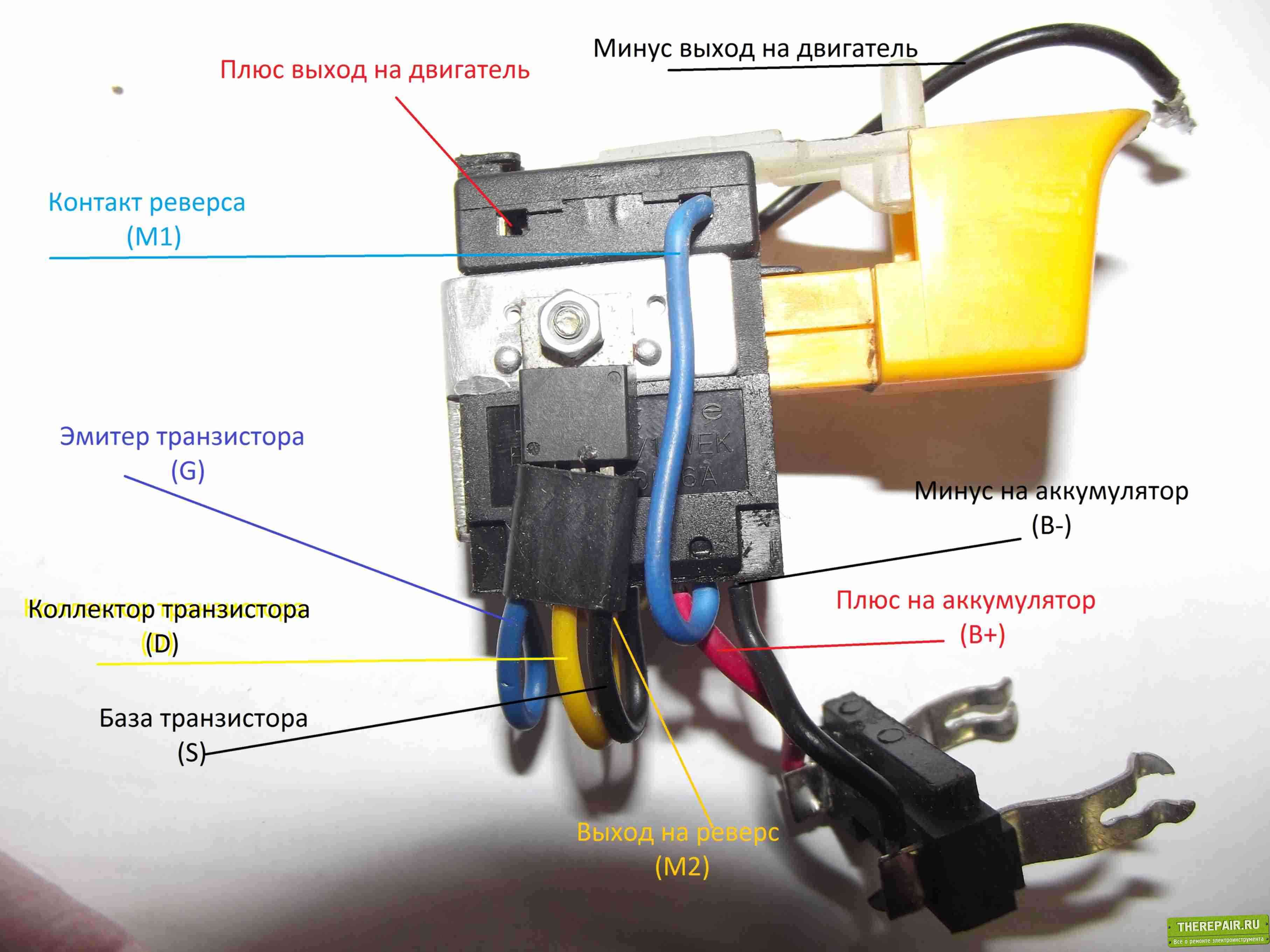 После покупки первым делом воткните конденсатор на новое место, после чего о нем можно не думать.
После покупки первым делом воткните конденсатор на новое место, после чего о нем можно не думать.
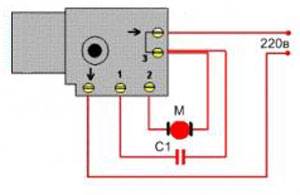
Схема подключения кнопки дрели с регулятором оборотов и реверсом
Собственно наглядная схема подключения показана на расположенном ниже изображении.
Дам несколько уточнений.
- На рисунке самый распространенный тип рассматриваемой запчасти. Крепление электропроводов от сетевой вилки осуществляется к клеммам, которые имеют болтовое крепление. Остальные втыкаются в самозажимные контакты. Если ваша кнопка не такая, то лучше по старому экземпляру сделать пометки, что куда крепится. Также на самом корпусе может быть нарисована схема, по которой тоже можно сориентироваться.
- Если вы подключили конденсатор так, как было написано выше, то после подсоединения проводов от вилки у вас на нижней части корпуса останутся только два контакта, куда нужно воткнуть два кабеля от статора. Обычно они имеют такое же положение на статоре, как на рисунке. Их длина должна быть больше, чем у двух других, чтобы они могли дотянуться до своих зажимов. При этом нет разницы, какой провод в какой из двух контактов втыкать.
- К зажимам реверса подключаются оставшиеся два электропровода от статора, а также кабели от щеток. При этом соединение осуществляется по диагонали: провода от статора втыкаются по разные стороны в диагонально расположенные контакты; и от щеток также. При этом от того, куда конкретно будут воткнуты провода, зависит только то, в какую сторону будет вращаться патрон при определенном положении курка реверса. Главное подсоединять диагонально.
 При этом нет разницы, какой провод в какой из двух контактов втыкать.
При этом нет разницы, какой провод в какой из двух контактов втыкать.Такова схема подключения. Надеюсь, что у вас получится все правильно подключить и дрель будет работать как надо.
Оцените статью: Поделитесь с друзьями!Простой регулятор оборотов электродвигателя от 6 до 25 вольт. Схема и описание
Этот простой и надежный регулятор оборотов электродвигателя подключается между источником питания и нагрузкой. Питание может поступать от батареи или AC/DC адаптера соответствующей нагрузки.
Нагрузкой может быть любой двигатель постоянного тока или лампа накаливания.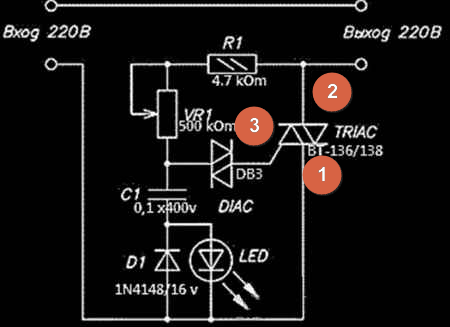 Благодаря импульсной работе (ШИМ), схема работает почти без потери энергии. Транзистор управления не требует радиатора.
Благодаря импульсной работе (ШИМ), схема работает почти без потери энергии. Транзистор управления не требует радиатора.
Схема регулятора идеально подходит для регулировки оборотов дрели для сверления плат. Во время малых оборотов обеспечивает работу дрели с относительно большим крутящим моментом.
Описание регулятор оборотов электродвигателя
Логические элементы DD1.1, DD1.2 (CD4011) используются в виде классического ШИМ генератора. Резистор R1 выполняет лишь защитную функцию. Частота генератора определяется емкостью С2 или С3 и сопротивлением потенциометра PR1 вместе с R2, R3. Параллельно соединенные логические элементы DD1.3, DD1.4 управляют транзистором MOSFET (VT1).
При использовании в схеме транзистора MOSFET, резистор R4 не нужен и на его место устанавливается перемычка. Данный резистор (R4) предусмотрен только на тот случай, если вместо MOSFET будет установлен транзистор Дарлингтона структуры n-p-n, например, BD649. Тогда для ограничения тока базы резистор R4 должен иметь значение 1к…2,2к.
Потенциометр PR1 позволяет изменять коэффициент заполнения генерируемого сигнала в очень широких пределах, примерно от 1% до примерно 99%. Сигнал с генератора периодически открывает и закрывает транзистор VТ1, а средняя мощность, поступающая на нагрузку (разъем Z2), зависит от коэффициента заполнения сигнала. Таким образом, потенциометр PR1 позволяет осуществить плавную регулировку мощности, подаваемую на нагрузку.
Включенный „наоборот” диод VD4 незаменим при использовании индуктивной нагрузки (например, электродвигатель). Без диода VD4, в момент отключения, на стоке транзистора VT1 могут возникнуть импульсы, значительно превышающие допустимо значение для данного транзистора и это может вывести его из строя.
Благодаря импульсной работе, потери мощности на транзисторе VT1 невелики и поэтому не требует радиатора, даже при токах порядка нескольких ампер, то есть мощности нагрузки до 100 Вт. Следует иметь в виду, что устройство является регулятором мощности, а не стабилизатором оборотов двигателя, поэтому обороты двигателя зависят от его нагрузки.
Hantek 2000 – осциллограф 3 в 1
Портативный USB осциллограф, 2 канала, 40 МГц….
ВНИМАНИЕ! Схема регулирует мощность в режиме пульсаций, подавая на нагрузку меандр. Такие импульсы могут быть источником электромагнитных помех. Для минимизации помех необходимо использовать по возможности короткие соединения между блоком и нагрузкой.
Соединительный шнур должен иметь вид витой пары (обычные два скрученные между провода). Также рекомендуется дополнительно подключить электролитический конденсатор (набор конденсаторов) емкостью 1000… 10000мк к разъему питания Z1.
В схеме предусмотрен дополнительный конденсатор C3, подключаемый с помощью перемычки J1. Включение этого конденсатора вызывает снижение частоты работы генератора с 700Гц до примерно 25Гц. Это полезно с точки зрения генерируемых электромагнитных помех.
Хотя в некоторых случаях снижение частоты может быть неприемлемо, например, это может привести к заметному мерцанию лампы. Тогда необходимо самостоятельно подобрать оптимальную емкость C3.
Подборка схем регулятора оборотов двигателя постоянного тока
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания резистор. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.
Блок питания 0…30 В / 3A
Набор для сборки регулируемого блока питания…
Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).
Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Радиоаматор, 4/2008
Паяльный фен YIHUA 8858
Обновленная версия, мощность: 600 Вт, расход воздуха: 240 л/час…
Схема простого контроллера скорости сверления
Здесь мы узнаем, как построить простую схему контроллера скорости сверления 220 В, зависящую от обратной ЭДС, которая позволяет крутящему моменту сверлильного станка увеличиваться пропорционально увеличению нагрузки.
Это означает, что после того, как сверло нагружено, сила крутящего момента увеличивается по мере увеличения нагрузки на буровое долото.Это позволяет буровому станку справляться с жесткими стенами и бетоном и никогда не перестает продвигаться вперед во время операции сверления даже под существенная нагрузка.
Обзор
Эта простая схема будет привлекательной в основном потому, что позволяет регулировать скорость сверления независимо от нагрузки на сверло.
При планировании используется идея о том, что по мере увеличения тока нагрузки обратная ЭДС сверла падает, в результате чего ток увеличивается.
Из принципиальной схемы видно, что эта схема несложна, и то же самое относится и к ее функционированию.
Как работает схема
На протяжении положительных полупериодов сети C2 заряжается через R1 и D1, так что напряжение на этом конденсаторе идентично «напряжению стабилитрона» цепи на T1.
Цепь, сконфигурированная вокруг T1, представляет собой регулируемый стабилитрон, в котором напряжение стабилитрона определяется настройкой Pl.
Фактически напряжение между коллектором и эмиттером характеризуется соотношением резисторов R3 и R2 + P1.
Падение напряжения на R3 определенно складывается с напряжением база-эмиттер T1 (0,6 В), поэтому это означает, что напряжение стабилитрона может быть выражено как:
(P1 + R2 + R3) 0,6 / R3.
Двигатель на самом деле не подключен в нормальном положении в начале цепи, скорее, это происходит вскоре после SCR 1.
Таким образом, время срабатывания SCR 1 определяется разницей между напряжением стабилитрона и обратной ЭДС двигателя. В случае, если двигатель будет сильно нагружен, SCR сработает раньше.
Просто потому, что используется SCR, схема может просто контролировать 180 ° цикла питания; поэтому с этой конкретной схемой невозможно изменить скорость сверления с 0 до 100%, однако этот тип контроллера используется исключительно в целях низкой скорости.
Недостатком этой простой схемы регулятора скорости сверла может быть то, что двигатель немного “заикается”, когда он не находится под какой-либо нагрузкой, тем не менее, этот результат исчезает, как только появляется нагрузка на сверло.
Катушка индуктивности L1 и конденсатор C1 предназначены для фильтрации высокочастотных влияний, вызываемых прерыванием фазы. SCR необходимо установить на радиаторе, чтобы гарантировать эффективное охлаждение.
Другая конструкция
Вторая схема контроллера скорости бурения, описанная в этой статье, позволяет бесконечно изменять скорости от нуля до примерно 75% от полной скорости, а также представлена вместе с переключателем для включения нормальной работы на полной скорости без отключения бурового станка. контроллер.
Контроллер сконструирован с компенсацией для сохранения постоянной скорости независимо от изменений нагрузки.
КОНСТРУКЦИЯ
Следует отметить, что контроллер подключается прямо к линиям без использования разделительного трансформатора.
Следует проявлять надлежащую осторожность при использовании конструкции, чтобы исключить вероятность возникновения каких-либо вредных обстоятельств.
Используемый SCR представляет собой монтажную шпильку и устанавливается с помощью прилагаемого к нему наконечника для пайки, припаянного к центральному выступу переключателя.
Для нагрузок около 3 А другой теплоотвод не требуется. В случае использования пластикового блока SCR, можно просверлить отверстие с выступом переключателя и SCR прикрутить к нему болтами.
Даже в этом случае важно поместить кусок алюминия (размером около 25 мм x 15 мм) между тиристором и переключателем, чтобы он работал как радиатор.
Не забывайте, что, учитывая, что блок работает при 120 В переменного тока, все внешние части должны быть заземлены. Мы использовали пластиковый ящик с металлической крышкой.Но, кроме того, мы использовали кабельный зажим, имеющий металлический винт со стенкой пластиковой коробки.
Этот винт необходимо заземлить в дополнение к крышке и клемме заземления выходной розетки. Заземляющий провод должен быть постоянным, то есть он будет проходить от одной точки заземления к другой, а не быть отдельными звеньями.
К одной клемме заземления можно припаять два провода заземления. Но ни в коем случае нельзя закреплять два провода одним винтом. Что включает в себя SCR, можно заметить, что ток срабатывания, обеспечиваемый R1 и R2, недостаточен.
В такой ситуации необходимо использовать дополнительный резистор 10 кОм параллельно с каждым резистором.
ИСПОЛЬЗОВАНИЕ КОНТРОЛЛЕРА
Подключите контроллер к стене, а сверло – к контроллеру. При необходимости выберите полную скорость или переменную. Помните, что вы не можете найти какой-либо переключатель ВКЛ / ВЫКЛ, представленный на устройстве, и по этой причине используется обычный переключатель на сеялке.
Когда выбрана полная скорость, дрель будет работать в большинстве случаев, и регулировка скорости на контроллере не может иметь абсолютно никакого результата.На очень низких скоростях можно определить, что сеялка рывками работает без нагрузки.
Когда выбрана переменная скорость, система управления будет регулировать скорость в диапазоне от нуля до примерно 75% от полной скорости. Мертвая зона может быть как на низкоскоростном, так и на высокоскоростном концах управления.
Это действительно нормально и является результатом различного качества сверления и допусков компонентов в контроллере. С другой стороны, по мере увеличения нагрузки скорость будет плавнее.
При использовании дрели на скорости ниже полной, охлаждение двигателя, вероятно, будет существенно снижено (поскольку охлаждающий вентилятор находится на валу якоря и также работает медленнее).
Следовательно, сверло может нагреться при работе на низких скоростях, и необходимо исключить длительные периоды использования в этом режиме.
Как это работает
Универсальный двигатель во время работы создает напряжение, которое обычно противодействует питанию. Это напряжение, называемое обратной ЭДС, пропорционально скорости двигателя.
Контроллер скорости бурения SCR учитывает этот результат, чтобы реализовать определенную величину компенсации скорости в зависимости от нагрузки.В этом контроллере используется SCR (кремниевый выпрямитель) для управления полуволновой мощностью двигателя сверла.
SCR будет работать до тех пор, пока а) анод (клемма A) будет положительным, в зависимости от катода (клемма K), b) когда затвор (клемма G) достигнет как минимум 0,6 В положительного напряжения в зависимости от катода, и, c) когда клемма затвора около 10 мА.
Контролируя уровень сигнала напряжения на затворе, мы успешно управляем временем, в которое SCR активируется в каждом прямом полупериоде.Это означает, что мы эффективно контролируем мощность, подаваемую на дрель.
Резистор R1, R2 и потенциометр RV1 образуют делитель напряжения, который подает полуволновое напряжение регулируемой амплитуды на затвор SCR. Если двигатель неподвижен, катод SCR, вероятно, будет иметь нулевое напряжение, и SCR включится почти полностью.
По мере увеличения скорости сверла вдоль сверла генерируется напряжение, что снижает эффективное напряжение на затворном катоде. Следовательно, по мере увеличения скорости двигателя подаваемая мощность уменьшается до тех пор, пока двигатель не стабилизируется на скорости, зависящей от настройки RV1.
Если на сверло установить нагрузку, сверло обычно будет уменьшаться, но поскольку напряжение на сверле также падает, на двигатель подается больше мощности, поскольку время срабатывания SCR автоматически увеличивается.
По этой причине однажды установленная скорость поддерживается постоянной независимо от нагрузки. Диод D2 используется для уменьшения вдвое мощности, рассеиваемой в R1, R2 и RV1, ограничивая ток через них только положительными полупериодами.
Диод D1 защищает затвор SCR от чрезмерного обратного напряжения.В положении полной скорости SCR просто замыкается SW1, следовательно, RV1 теряет управление, и на буровую установку подается полная мощность.
ЦЕПЬ УПРАВЛЕНИЯ СКОРОСТЬЮ ЭЛЕКТРИЧЕСКОЙ ДРЕЛИ
Цепь управления- Цепи нижнего напряжения выключателя, используемые для управления включением и открытие операций основного оборудования.
- Цепь, которая контролирует некоторую нагрузку во всей системе управления, будь то быть реле или катушкой контактора или основной нагрузкой.
- схема обратной связи, которая вычитает из ввода
- электродрель
- Дрель или дрель-двигатель – это инструмент, оснащенный вращающимся режущим инструментом, обычно сверло, используемое для сверления отверстий в различных материалах.Резка инструмент захватывается патроном на одном конце сверла и вращается при нажатии против целевого материала.
- Портативный ручной инструмент с приводом от двигателя, используемый для сверления отверстий в материал. Работает от постоянного или переменного тока.
- вращающаяся дрель с приводом от электродвигателя
- скорость
- Скорость движения или действия
- пройденное расстояние за единицу времени
- порыв: быстро двигаться; «Он бросился по холлу встречать гостей»; “Машины промчался по улице »
- Скорость, с которой кто-то или что-то может двигаться или действовать
- ускорять: двигаться быстрее; «Автомобиль разогнался»
- Каждое из возможных передаточных чисел велосипеда или мотора автомобиль
Velleman Регулятор скорости двигателя переменного тока
Этот контроллер был разработан для управления переменным током. двигатели с угольными щетками, от дрелей до пылесосов и пил.В отличие от обычных диммеров, отсечка фазы выполняется только один раз за период. Момент резка определяет скорость, которую можно регулировать от 5 до 95%. Благодаря этому управление, этот комплект обеспечивает высокий крутящий момент даже на низких оборотах! Не только для 110 В переменного тока и двигатели 220 В переменного тока, этот комплект также можно использовать для двигателей переменного тока низкого напряжения (24 В переменного тока) нагрузки. Цепи питания и нагрузки электрически изолированы друг от друга. как для безопасности, так и для надежности. В отличие от многих контроллеров переменного тока, RFI подавлен для устранения шума и помех.Входная мощность переменного тока составляет 110-240 В переменного тока. Напряжение нагрузки составляет 24-240 В переменного тока. Размеры 5,1 x 3,0 дюйма. Из Веллеман: полный контурСегодня мы начали работу над простой схемой проект, сделанный Kits by Kids, группой, которую мы видели на Maker Faire. Простые переключатели управлять двумя цепями от батареи 9 В. Первый загорается светодиодом через чашка токопроводящей жидкости – это та, которую мы закончили сегодня вечером. Секунда, с которым предстоит заняться позже на неделе, будет крутиться очень простой мотор. Здесь Лиана показывает простой выключатель (вращающийся дюбель), который включает и выключает свет.
диспетчерская38/365 Это в прачечной для моего квартира. Это действительно старое жуткое ощущение.
Регулятор скорости двигателя переменного тока 1000 Вт
Эта схема контроллера скорости электродвигателя переменного тока на основе симистора предназначена для управления скоростью электродвигателей переменного тока, таких как сверлильные станки, вентиляторы, пылесосы и т. Д. Скорость электродвигателя можно контролировать, изменяя настройку потенциометра P1.Настройка P1 определяет фазу запускающего импульса, запускающего симистор. Схема включает самостабилизирующуюся технику, которая поддерживает скорость двигателя даже при его нагрузке. Например, когда двигатель бурового станка замедляется из-за сопротивления просверливаемого объекта, противо-ЭДС двигателя также уменьшается.Это приводит к увеличению напряжения на R2-P1 и C3, что приводит к более раннему срабатыванию симистора, и соответственно увеличивается скорость. Загрузки Регулятор скорости двигателя переменного тока 1000 Вт – Ссылка
Комплект для измерения ESR / емкости / индуктивности / транзистора1 Ом – 20 МОм), проверяет множество различных типов транзисторов, таких как NPN, PNP, полевые транзисторы, полевые МОП-транзисторы, тиристоры, тиристоры, симисторы и многие типы диодов. Он также анализирует такие характеристики транзистора, как напряжение и коэффициент усиления. Это незаменимый инструмент для поиска и устранения неисправностей и ремонта электронного оборудования путем определения производительности и исправности электролитических конденсаторов. В отличие от других измерителей ESR, которые измеряют только значение ESR, этот измеритель одновременно измеряет значение ESR конденсатора, а также его емкость. |
|
|
|
Триггерный переключатель DGZZI 220V 6A FA2-6 / 1BEK Электрическая ручная дрель Блокировка управления скоростью на кнопочном переключателе –
Депозит без импортных сборов и 14 долларов США.44 Доставка в РФ Подробности
- Убедитесь, что это подходит введя номер вашей модели.
- Модель: FA2-6 / 1BEK.Материал: Пластик, Металл.
- Номинальный ток: 6А. Номинальное напряжение: 220 В переменного тока.
- Тип действия: Заблокировать. Содержимое упаковки: 1 шт.
- Легко собрать и легко работать.
- Скорость удобно регулировать, нажмите кнопку переключателя, чтобы начать, чем ниже вы нажимаете, тем выше скорость.