Подборка схем регулятора оборотов двигателя постоянного тока
Главная » Бытовая электроника » Подборка схем регулятора оборотов двигателя постоянного тока
Регулировать скорость вращения маломощного коллекторного электродвигателя можно путем подключения постоянного резистора в цепь питания. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения. Ниже рассмотрим четыре варианта регулятора оборотов двигателя постоянного тока лишенных этих недостатков.
Данные схемы так же можно с успехом использовать и для изменения яркости свечения 12 вольтовых ламп накаливания.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
ШИМ регулятор оборотов двигателя. На однопереходном транзисторе VT1 (КТ117А) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 (К140УД7) играет роль компаратора, создающего ШИМ, поступающий на базу транзистора VT2 (КТ817Б).
Изменение скорости вращения двигателя осуществляется с помощью переменного резистора R5, который меняет длительность импульсов. Так как, амплитуда ШИМ постоянна и равна напряжению питания электродвигателя, двигатель не остановиться даже при очень малой скорости вращения.
Вторая схема
Эта схема схожа с предыдущей, но в роли задающего генератора использован дополнительный операционный усилитель DA1 (К140УД7).
Этот ОУ работает как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Эта схема своеобразная и построена на популярном таймере NE555. Задающий генератор работает с частотой 500 Гц. Ширину импульсов, а следовательно, и частоту вращения двигателя возможно изменять в диапазоне от 2 % до 98 %.
Четвертая схема
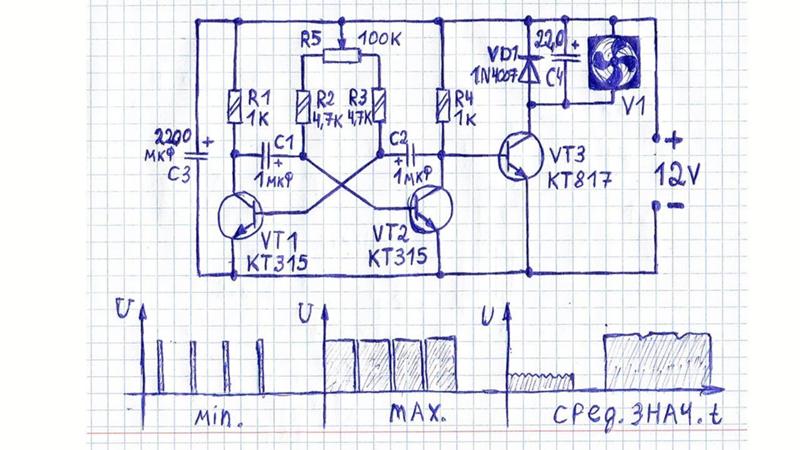
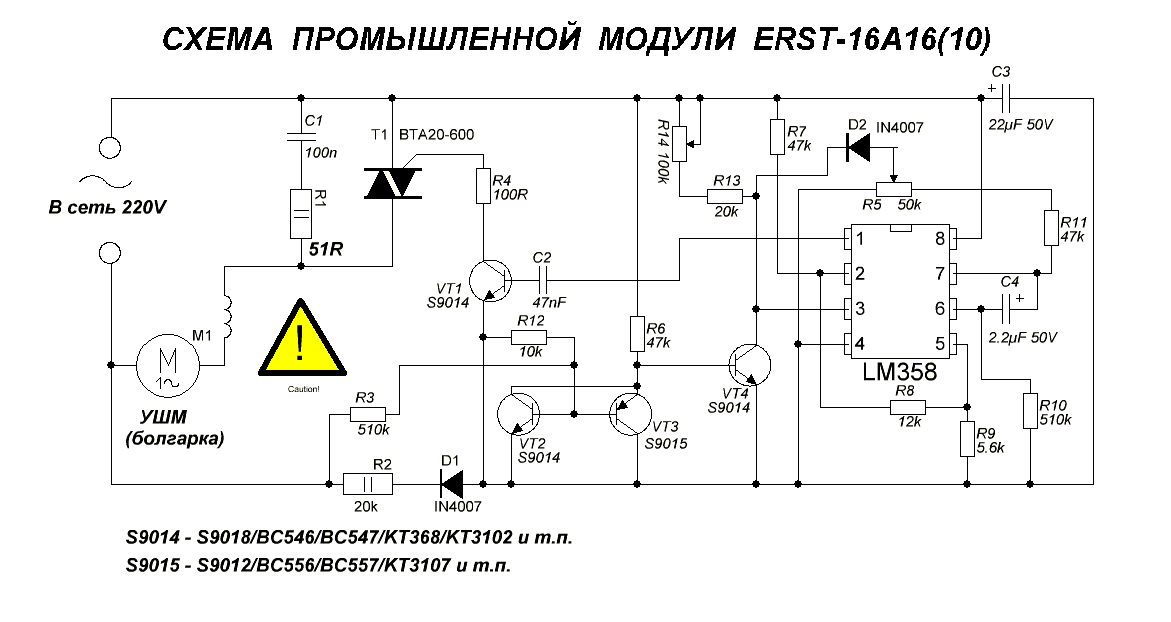
Слабым местом во всех вышеприведенных схемах является то, что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя. Решить эту проблему можно с помощью следующей схемы:
Решить эту проблему можно с помощью следующей схемы:
Блок питания 0…30В/3A
Набор для сборки регулируемого блока питания…
Подробнее
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых составляет 2 кГц. Суть схемы — присутствие положительной обратной связи (ПОС) через элементы R12, R11, VD1, C2 и DA1.4, которая стабилизирует частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не происходят автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах можно использовать следующие детали: транзистор КТ817Б — КТ815, КТ805; КТ117А можно заменить на КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 можно поменять мощным полевым транзистором, например, IRF3905 или ему подобным.
Тестер транзисторов / ESR-метр / генератор
Многофункциональный прибор для проверки транзисторов, диодов, тиристоров…
Подробнее
Categories Бытовая электроника Tags Двигатель
Отправить сообщение об ошибке.
Регулятор оборотов электродвигателя: назначение, принцип работы, подключение
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.

- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
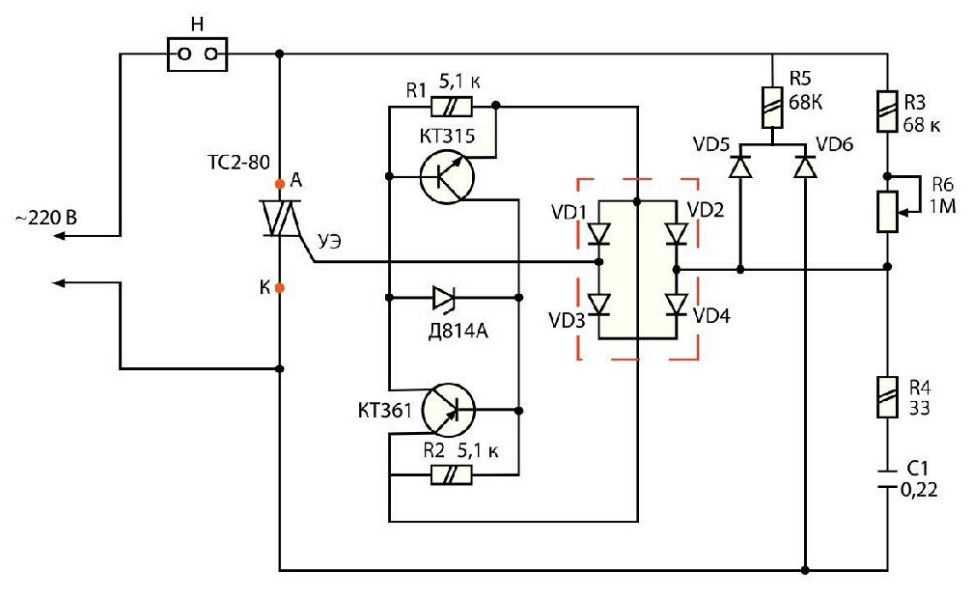
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
 Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1.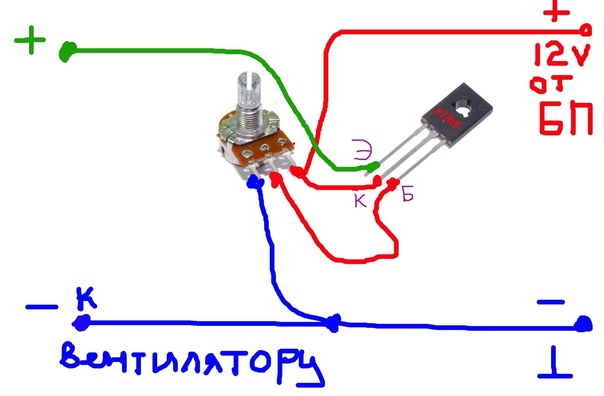 Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
 Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
 Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.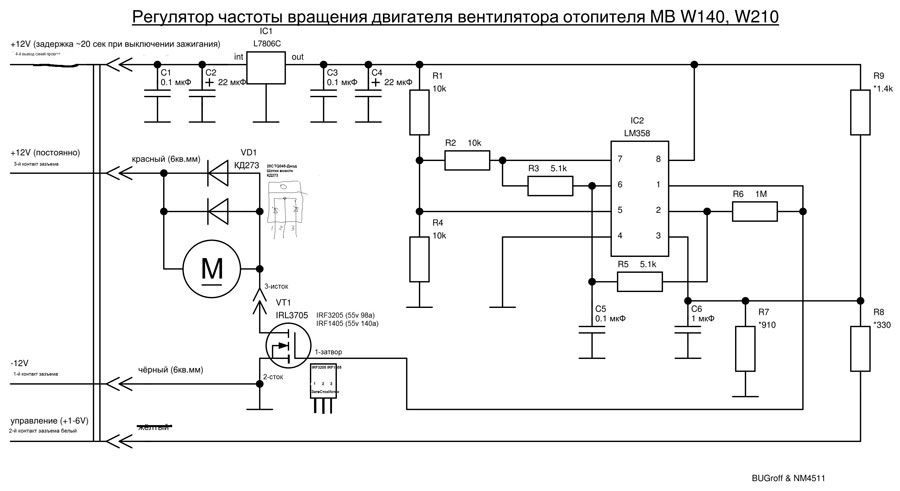
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
Схема подключения регулятораДалее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля.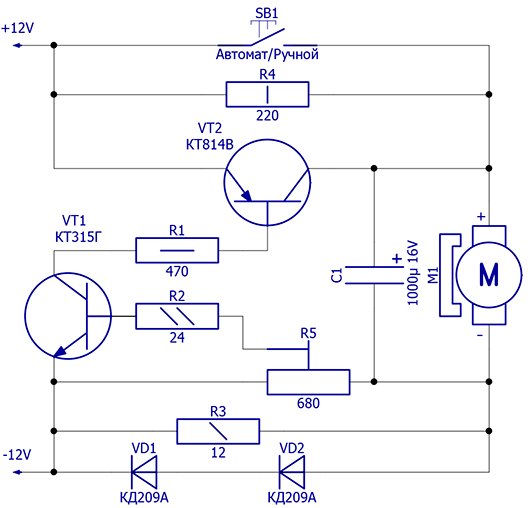
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
Проверьте цветовую маркировкуЕсли все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Цепь управления скоростью двигателя постоянного тока 6 257 просмотров
В этом уроке мы демонстрируем проект схемы управления скоростью двигателя постоянного тока. Главной особенностью DC Motor Speed CONTROL является схема ШИМ на основе микросхемы 555, предназначенная для получения переменного напряжения по сравнению с постоянным напряжением. Вот процедура для PWM.
Возьмите простую схему, как показано на следующей схеме. Эта схема проста в изготовлении и требует нескольких недорогих компонентов, включая источник питания, двигатель постоянного тока, микросхему таймера 555, резисторы, конденсатор, потенциометр, переключатель и L29. 3D ИС.
3D ИС.
Buy from Amazon
Hardware ComponentThe following components are required to make DC Motor Speed Control Circuit
| S. No | Component | Value | Qty |
|---|---|---|---|
| 1 | 555 Таймер IC | 1 | |
| 2 | Конденсатор | 10NF | 1 |
| 3 | Переключатель | ||
| 3 | |||
| 3 | 0037 – | 1 | |
| 4 | Diode | IN4148 | 2 |
| 5 | potentiometer | 100K -220K | 1 |
| 6 | IC | L293D | 1 |
| 7 | Small DC motor | – | 1 |
| 8 | Power supply | 9V | 1 |
| 9 | Resistor | 1K, 100R | 1 |
NE555 IC Pinout
Для подробного описания расписания, функций Dimension и спецификаций. ТАЙМЕР IC выдает ШИМ-сигнал, зависящий от отношения сопротивления потенциометра к источнику питания, с коэффициентом заполнения. Конденсатор должен здесь нагружать и разгружать другой набор резисторов из-за потенциометра и пары диодов. Таким образом, конденсатор заряжается и разряжается за разное время. Выход высокий во время загрузки конденсатора и низкий во время разгрузки конденсатора. Мы различаемся высоким выходным сигналом, низким временем вывода и, следовательно, ШИМ.
ТАЙМЕР IC выдает ШИМ-сигнал, зависящий от отношения сопротивления потенциометра к источнику питания, с коэффициентом заполнения. Конденсатор должен здесь нагружать и разгружать другой набор резисторов из-за потенциометра и пары диодов. Таким образом, конденсатор заряжается и разряжается за разное время. Выход высокий во время загрузки конденсатора и низкий во время разгрузки конденсатора. Мы различаемся высоким выходным сигналом, низким временем вывода и, следовательно, ШИМ.
ШИМ таймера подается на сигнальный вывод h-моста L239D для управления генератором постоянного тока. Мы получаем другое среднеквадратичное напряжение на клеммах и обороты в минуту с разным коэффициентом ШИМ. ШИМ таймера подключен ко второму сигнальному выводу для изменения направления вращения.
Области применения и использование
Двигатели постоянного тока подходят для многих применений, включая конвейеры, поворотные столы и другие приложения, требующие динамической скорости и постоянного и низкоскоростного крутящего момента. Они хорошо вписываются даже в сложные приложения для динамического торможения и управления задним ходом, популярные во многих типах промышленного оборудования.
Они хорошо вписываются даже в сложные приложения для динамического торможения и управления задним ходом, популярные во многих типах промышленного оборудования.
Похожие сообщения:
Как сделать схему регулятора скорости двигателя постоянного тока (50В, 15А)
Всем привет! сегодня мы собираемся построить схему регулятора скорости двигателя постоянного тока, способную управлять двигателем постоянного тока 50 В, 15 А. Принципиальная схема, работа и компоненты, используемые при создании этого проекта, подробно объясняются. Это самый полный регулятор скорости двигателя постоянного тока, который вы найдете в Интернете.
Вы можете посмотреть это видео по рабочей части проекта
Технические характеристики этого регулятора скорости двигателя постоянного тока:- Этот регулятор скорости принимает входное напряжение от от 6 до 50 В .
- МАКС. выходной ток составляет 15 А при использовании надлежащего радиатора,
- Имеют защиту от перенапряжения затвора и
- Защиту от обратного хода или скачков напряжения.
После подключения требуемого входа напряжения и двигателя к выходной клемме скорость двигателя можно увеличить или уменьшить с помощью потенциометра.
Содержание
- Спецификации этого контроллера скорости двигателя постоянного тока:
- Диаграмма скорости двигателя двигателя
- Требуется компоненты
- . ЦЕПЬ РЕГУЛЯТОРА
- Как работает эта схема регулятора скорости?
- Контроллер скорости двигателя постоянного тока в действии
- Важные моменты
- LM317 Voltage Regulator
- 555 timer
- IRF3205S n-channel Mosfet
- 330 uF capacitor(63V)
- 220 мкФ конденсатор (63 В)
- 47 мкФ конденсатор (63 В)
- 10 нФ керамические конденсаторы X 3
- 1 кОм резисторы X 2
- 330 Ом резистор кОм резистор 6.
- 100-ohm resistor
- 1n4007 diodes X 3
- 16 A Schottky diode
- 100k potentiometer
- 33-ohm Resistor
- 10V Zener Diode
 0159
0159At first, эта схема может показаться очень сложной, поэтому давайте упростим ее. Эта схема разделена на три основные части:
Регулятор напряжения или понижающий преобразователь
ШИМ-генератор.
Цепь переключения.
Теперь давайте разберем каждую часть по отдельности. Я использую настольный блок питания для питания схемы. И установите напряжение около 12 В в качестве входного напряжения для регулятора скорости. Я использую осциллограф для анализа сигналов.
Для лучшего понимания сначала рассмотрим схему переключения:
КОММУТАЦИОННАЯ ЦЕПЬ Коммутационная схема контроллера скорости двигателя постоянного тока Схема переключения используется для включения и выключения выхода на очень высокой частоте.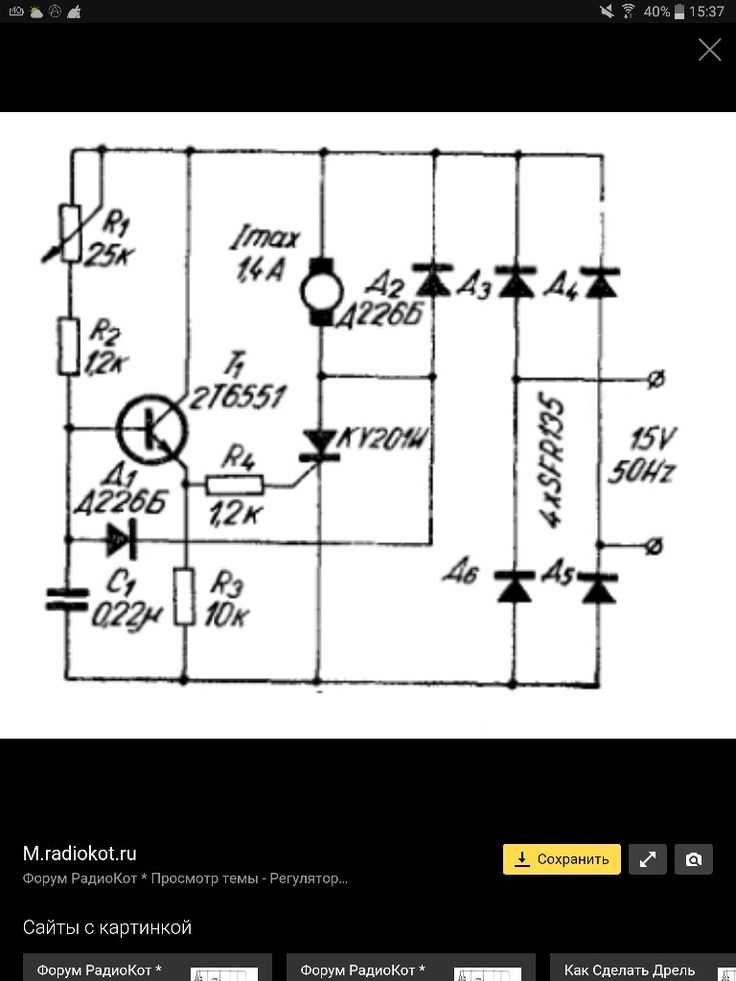 Здесь Mosfet используется для выполнения этой работы.
Здесь Mosfet используется для выполнения этой работы.
МОП-транзистор может переключать высокое выходное напряжение между его стоком и истоком, если на его затвор подается пороговое напряжение. Это пороговое напряжение, как правило, очень меньше, чем напряжение, которое Mosfet способен переключать, или напряжение между его стоком и истоком.
Также по мере того, как напряжение на затворе МОП-транзистора превышает пороговое напряжение затвора, все больше и больше тока протекает через сток к истоку.
Предостережение : Пороговое напряжение — это напряжение, при котором MOSFET начинает немного проводить ток. Чтобы полевой МОП-транзистор работал достаточно, чтобы управлять значительной нагрузкой, ему также требуется некоторое дополнительное напряжение.
Таким образом, если двигатель постоянного тока подключен между затвором и истоком MOSFET, напряжение на нем и, следовательно, скорость можно контролировать, контролируя напряжение на затворе.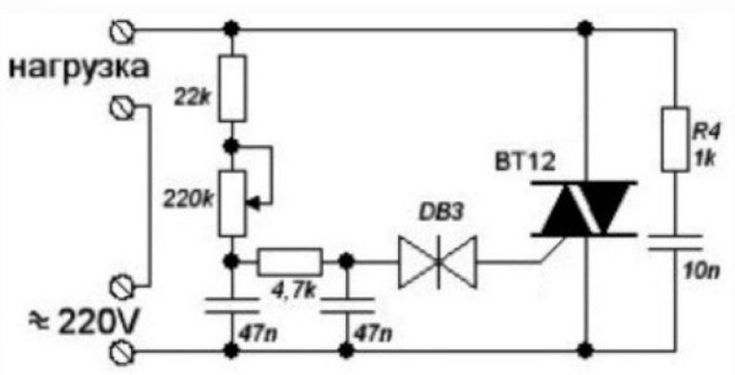 А для этого нам нужно переменное напряжение на воротах. А вот и ШИМ-генератор 9.0018 спешит на помощь.
А для этого нам нужно переменное напряжение на воротах. А вот и ШИМ-генератор 9.0018 спешит на помощь.
Требуемое переменное напряжение на затворе может быть легко обеспечено с помощью напряжения ШИМ. ШИМ или широтно-импульсная модуляция — это метод, используемый для получения любого напряжения от 0 до максимума входного напряжения. Это достигается коммутацией входного напряжения с определенной частотой и определенной скважностью.
Предположим, у нас есть входное напряжение 5В. Это может быть либо 5 В, либо 0. Теперь, если его включать и выключать с очень высокой частотой, мы получаем прямоугольную форму волны.
Допустим, время включения составляет 50 % от общего времени. Эти 50% называются рабочим циклом волны ШИМ, что дает нам конечное напряжение 2,5 вольта. По мере увеличения этого времени включения или рабочего цикла общее напряжение увеличивается.
И когда рабочий цикл достигает 100%, мы получаем 5 вольт на выходе. Точно так же, когда он равен 0%, мы получаем 0 вольт на выходе. Это называется ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ, поскольку мы модулируем ширину импульса для получения переменного напряжения.
Узнайте больше о ШИМ здесь: ШИМ в деталях
Форма волны ШИМСхема регулятора скорости здесь генерирует волну ШИМ с помощью таймера 555 IC . Эта ИС обеспечивает требуемое переменное напряжение на затворе MOSFET, работая в нестабильном режиме.
Теперь существует определенный предел входного напряжения ИС, который наверняка меньше предела напряжения этого регулятора скорости.
Следовательно, чтобы обеспечить подходящее рабочее напряжение для ИС таймера 555, используется схема регулятора напряжения, которая обеспечивает фиксированное напряжение для ИС. 9Для этой цели в этой схеме используется регулятор напряжения 0017 LM317 .
ЦЕПЬ РЕГУЛЯТОРА НАПРЯЖЕНИЯ Цепь регулятора напряжения регулятора скорости двигателя постоянного тока В данном случае используется регулятор напряжения LM317. Он обеспечивает переменное напряжение от 1,25 до 37 вольт. Он используется здесь из-за его нескольких преимуществ по сравнению с другими регуляторами напряжения, такими как Программируемое выходное напряжение , Высокий выходной ток , лучшая линия и регулирование нагрузки.
Он обеспечивает переменное напряжение от 1,25 до 37 вольт. Он используется здесь из-за его нескольких преимуществ по сравнению с другими регуляторами напряжения, такими как Программируемое выходное напряжение , Высокий выходной ток , лучшая линия и регулирование нагрузки.
Узнайте больше о регуляторах напряжения здесь: Регуляторы напряжения в деталях
Как работает эта схема регулятора скорости?Конденсатор емкостью 330 мкФ подключен к клеммам входного питания для сглаживания постоянного тока. За ним следует последовательно резистор 330 Ом с конденсатором 47 мкФ , образующим фильтр нижних частот, который затем питает регулятор напряжения LM317.
Этот регулятор напряжения программируется с помощью двух резисторов (R3 и R2) , чтобы дать постоянное напряжение 9 вольт.
Стоит отметить, что для получения этого выхода 9 В падение напряжения должно быть больше 2,5 В или входное напряжение должно быть не менее 11,5 В. Чтобы получить выходное напряжение, отличное от этого, вы должны изменить значения этих резисторов в соответствии с частотной формулой, указанной в техническом описании.
Чтобы получить выходное напряжение, отличное от этого, вы должны изменить значения этих резисторов в соответствии с частотной формулой, указанной в техническом описании.
| VO = VREF (1 + R2 / R1) + (IADJ × R2) |
Загрузите техническое описание LM317 отсюда: техническое описание LM317
Здесь R2 равен 6,2k, а R1 равен 1k. С г. Яприл. находится в диапазоне мкА, просто игнорируйте его здесь. Это дает нам выходное напряжение 9 вольт. Затем эти 9 вольт питают таймер 555 . Здесь мы используем таймер 555 в нестабильном режиме или в качестве ШИМ-генератора.
№ контакта. 1 микросхемы заземлен. 2 и 6 соединены вместе, аналогично 4 и 8. Конденсатор 220 мкФ сглаживает поступающие 9 вольт.
Сейчас, Резистор 1K , 2 диода 1N4007 , потенциометр 100k и конденсатор 10 нФ образуют RC-цепь зарядки-разрядки, вызывая ШИМ-выход на третьем выводе таймера 555.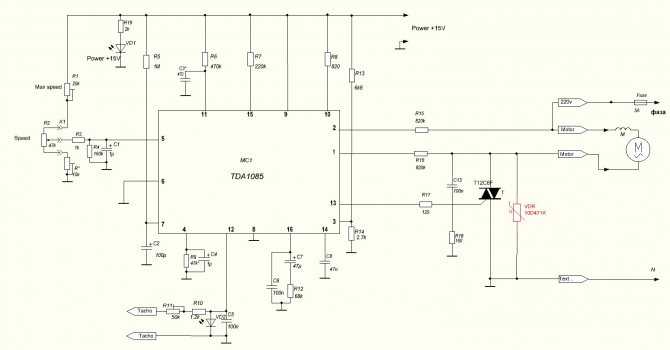
Этот выход ШИМ управляет затвором MOSFET. Если вы хотите узнать больше о таймере 555 и о том, как он генерирует волну ШИМ, я предлагаю вам просмотреть множество отличных статей, доступных в Интернете.
Узнайте больше о 555 таймерах здесь: 555 Таймер подробно
Некоторые проекты таймеров 555 с подробным объяснением: 555 Проекты таймеров
RC-цепь зарядки-разрядки Наиболее важным аспектом волны ШИМ является ее частота, и вот формула частоты таймера 555 для нее. Вы также можете рассчитать частоту выхода ШИМ с помощью онлайн-калькуляторов.| Частота = 1,44 / (R1+2 × R2) × C1 HZ |
Скачать 555 Timer DataShate DataShate PlaceStuater Calctorators Calculators Calculators Calculators: 555. значение R1 (1 кОм), емкость (около 7 нФ из-за допуска и других факторов) и значение потенциометра, которое составляет примерно 91 кОм в моем случае в формуле дает нам частоту 1100Гц.
Конечно, это не точно из-за нескольких других факторов, влияющих на схему.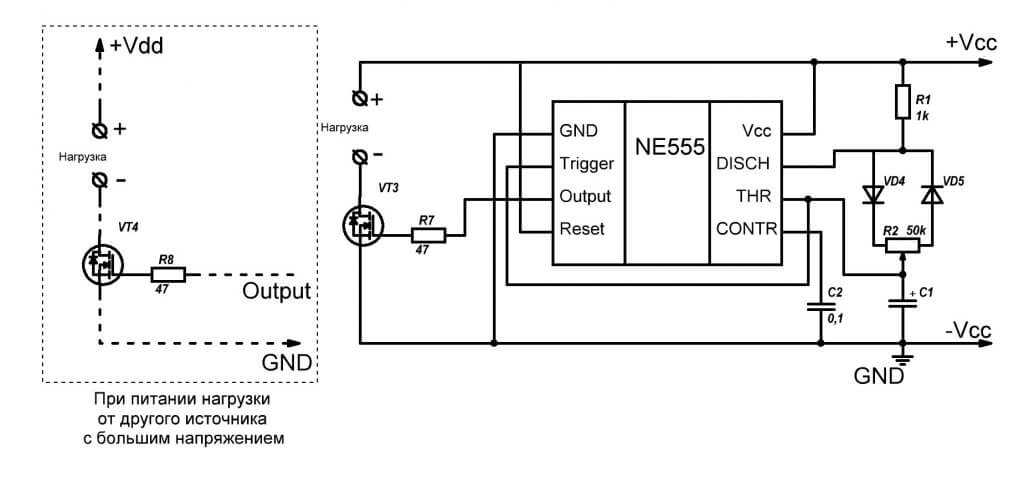 Фактическая частота составляет 1,3 кГц, что является почти постоянной величиной от 0 до 100% рабочего цикла выхода ШИМ.
Фактическая частота составляет 1,3 кГц, что является почти постоянной величиной от 0 до 100% рабочего цикла выхода ШИМ.
Этот выход ШИМ управляет затвором MOSFET
Исток полевого МОП-транзистора заземлен, а сток подключен к одной клемме выхода, а другая клемма к 12 В. Таким образом, двигатель подключается между + ve источника питания 12 В и стоком MOSFET .
Теперь, чтобы защитить МОП-транзистор от скачков напряжения, вызванных двигателем, диод Шоттки подключен параллельно двигателю или между стоком и плюсом источника питания 12 В.
Узнайте больше об обратноходовых диодах здесь: Основы обратноходовых диодов
Диоды Шоттки, как правило, предпочтительны для обратноходовых диодов, поскольку они имеют наименьшее прямое падение (~0,2 В, а не >0,7 В для малых токов) и способны быстро реагировать на обратное смещение (при повторном включении катушки индуктивности) или Другими словами, диод Шоттки имеет мгновенное обратное время восстановления, поэтому подходит для высокочастотных применений.