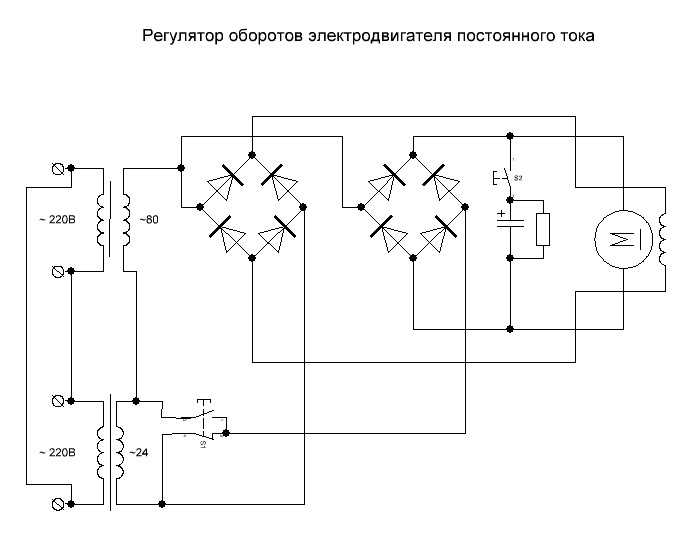
Надежная схема регулятора оборотов коллекторного двигателя без потерь мощности с обратной связью по Тахо
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать – момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
- Особенности регулирования скорости
- Обобщенная схема регулятора
- Разновидности коллекторных двигателей
- Конструкция мотора
- Выбор схемы
- Особенности конструкции
- Принцип управления
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.

Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.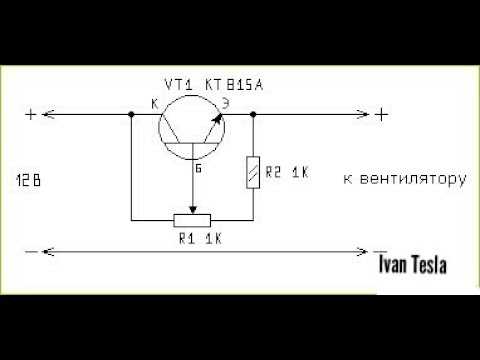
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
 При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.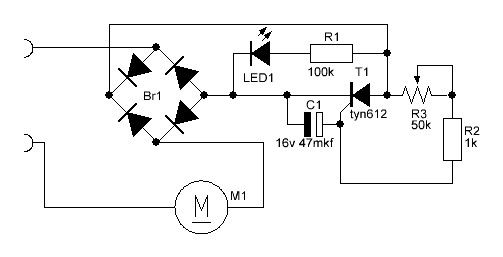
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.
В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт.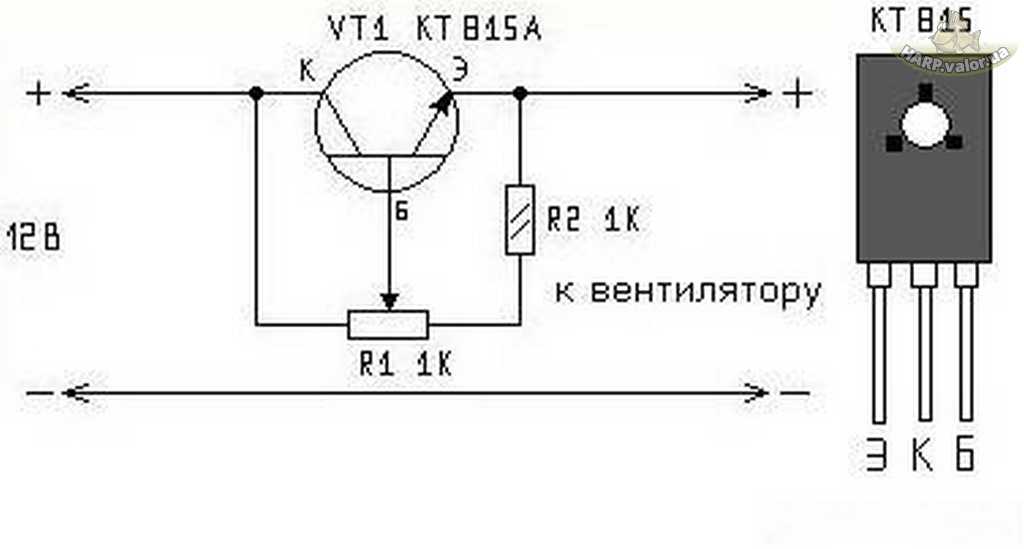 В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.
В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.
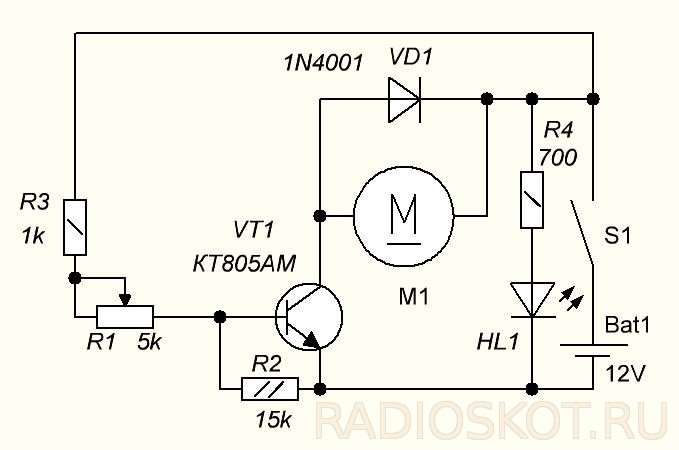
При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Схема регулятора
Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности. На рисунке приведена печатная плата регулятора:
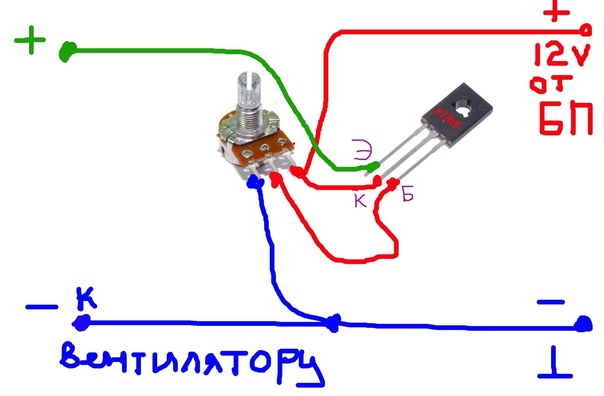
Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм. Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:
Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:
Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1.1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:
В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры. Диод также можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом в обратном включении, это было сделано для защиты транзистора в моменты включения – отключения схемы, так как двигатель у нас нагрузка индуктивная. Также, в схеме предусмотрена индикация включения слайдера на светодиоде, включенном последовательно с резистором.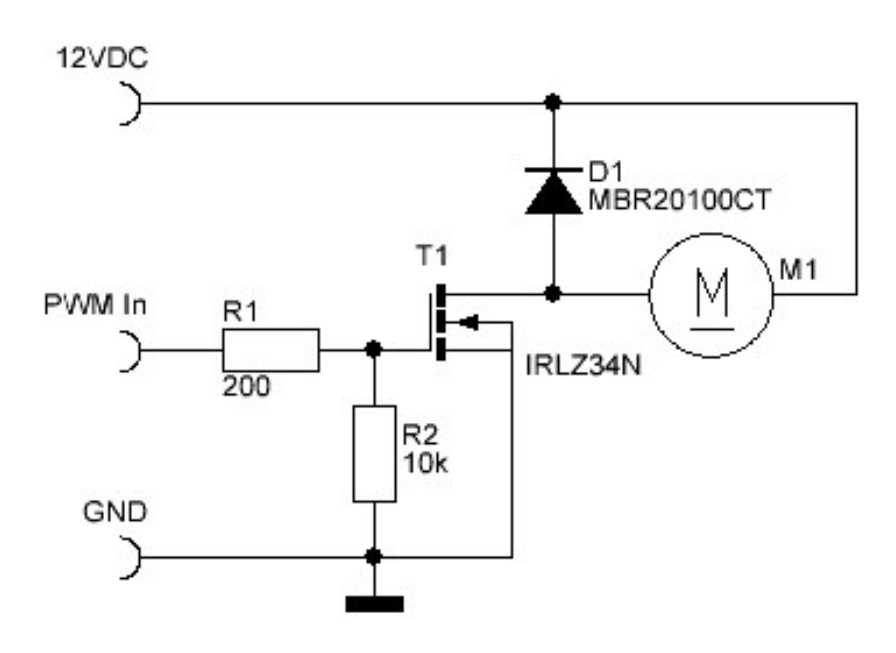
При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже:
Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике.
Видео работы
В скором времени, как будут приобретены недостающие части, в основном механика, приступлю к сборке устройства в корпусе. Статью прислал Алексей Cитков.
Форум
Цепи управления скоростью двигателя
Киран Салим
В отличие от двигателей переменного тока, двигатели постоянного тока очень просты в использовании, поскольку их скорость можно легко изменить. Итак, … Читать далее
Киран Салим
В отличие от двигателей переменного тока, двигатели постоянного тока очень просты в использовании, поскольку их скорость можно легко изменить. Итак, … Читать далее
Итак, … Читать далее
Фарва Навази
Введение В наших различных статьях мы обсуждали управление скоростью двигателя постоянного тока. Итак, мы подумали обсудить … Читать далее
Фарва Навази
Широтно-импульсная модуляция (ШИМ) – это метод, используемый для управления током, позволяющий управлять / контролировать скорость … Читать далее
Фарва Навази
Введение Технология двигателей постоянного тока значительно продвинулась вперед и в настоящее время широко используется в различных секторах. Один из … Читать далее
Киран Салим
Контроллер двигателя постоянного тока — это любое устройство, которое может управлять положением, скоростью или крутящим моментом двигателя постоянного тока… Читать далее
Киран Салим
В этом уроке мы собираемся сделать «схему контроллера шагового двигателя».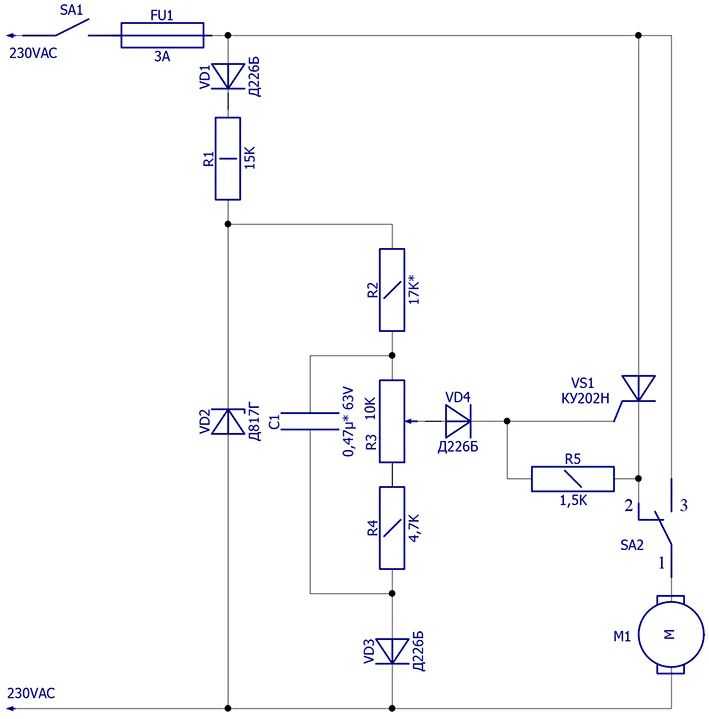 Когда хочется конкретного … Читать далее
Когда хочется конкретного … Читать далее
by Wajid Hussain
Введение Сервобиблиотека – отличная библиотека для управления серводвигателями. В этой статье вы найдете «Arduino Servo … Читать далее
Фарва Навази
Введение Машины постоянного тока широко используются в различных коммерческих и промышленных секторах, как и двигатели постоянного тока. И, … Читать далее
Фарва Навази
Машины постоянного тока широко используются в различных коммерческих и промышленных секторах, как и двигатели постоянного тока. И, в … Читать далее
И, в … Читать далее
Фарва Навази
Введение Устройства постоянного тока широко используются во многих коммерческих и промышленных секторах, как и двигатели постоянного тока. Более того, … Читать далее
Киран Салим
В этом уроке мы собираемся создать «ШИМ-схему управления скоростью двигателя постоянного тока». Двигатель постоянного тока … Читать далее
Фарва Навази
Введение Двигатели постоянного тока имеют широкий спектр применения в электронных устройствах. Если вы специалист по электрике или электронике… Читать далее
Фарва Навази
Введение Если вы живете в жарком регионе, вы знаете о важности охлаждающих вентиляторов и их преимуществах. … Читать далее
… Читать далее
Фарва Навази
Введение Шаговый двигатель широко используется в электромеханических устройствах и схемах, он имеет ротор … Читать далее
Фарва Навази
Введение Двигатели постоянного тока используются во многих электронных устройствах. Он широко используется в промышленности, автоматизации и … Читать далее
Руководство по цепям управления вентиляторами и регулировке скорости
Скачать PDF
Abstract
Линейная схема измеряет температуру и регулирует скорость вращения охлаждающего вентилятора, генерируя переменное напряжение питания для вентилятора.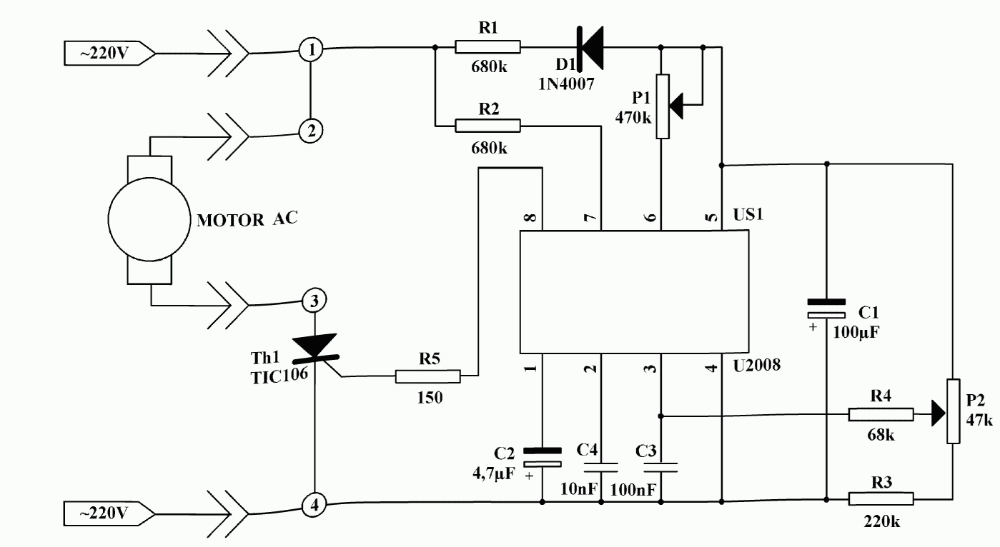
Шум вентилятора становится все более серьезной проблемой по мере того, как в офисе и дома появляется все больше электронного оборудования. Вентилятор с регулируемой скоростью позволяет работать медленнее и тише, когда позволяют температурные условия.
Цепи управления вентиляторами варьируются от простых переключателей, повышающих скорость вращения вентилятора при определенной температуре, до вентиляторов с цифровым управлением и плавной регулировкой скорости. Переключатели высокой/низкой скорости недороги, но звук резких изменений скорости может раздражать. Вентиляторы с цифровым управлением работают хорошо, но такие схемы дороже, и система должна включать последовательную шину. В этих рекомендациях по применению представлена недорогая автономная аналоговая схема для управления скоростью вращения вентилятора ( Рисунок 1 ), который легко настраивается для любой желаемой линейной зависимости между напряжением вентилятора и температурой ( Рисунок 2 , кривые B и C).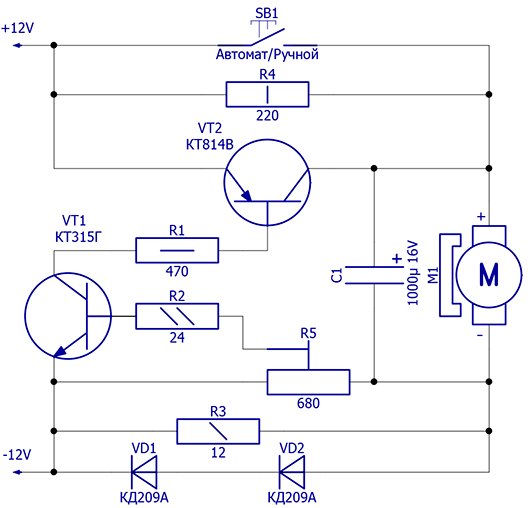 Фактические точки данных нанесены в зависимости от желаемого напряжения на рисунке 2.
Фактические точки данных нанесены в зависимости от желаемого напряжения на рисунке 2.
Рис. 1. Эта схема обеспечивает непрерывное линейное напряжение управления вентилятором, пропорциональное температуре.
Рис. 2. Как описано в тексте, эти кривые иллюстрируют выходное напряжение в зависимости от температуры для схемы на Рис. 1.
Кривая «A» на рис. 2 представляет выходной сигнал аналогового датчика температуры MAX6605 в зависимости от температуры в °C:
Vsensor = 0,0119 В/°C × Темп + 0,744В.
Кривая «B» связывает напряжение вентилятора с температурой и объединяет минимальное «напольное» напряжение 8,0 В с наклонной линией:
Vfan = 0,114 В/°C × Темп + 6,86В. Половое напряжение обеспечивает вращение вентилятора при низких температурах, а выше 10°С напряжение увеличивается с наклоном 0,114В/°С, пока не достигнет полного значения при 45°С. Простое усиление на выходе MAX6605 не дает напряжения пола 8В, а коэффициент усиления (90,58 = 0,114/0,0119), необходимое для получения наклона напряжения вентилятора, — это не то же самое усиление (9,22 = 6,86 В/0,744 В), которое необходимо для получения точки пересечения оси Y.
Чтобы преобразовать линию «А» в линию «В», вы должны вычесть смещение напряжения из выходного сигнала датчика температуры, а затем умножить результат на константу. Этого можно добиться с помощью схемы на рис. 1, в которой вы соедините пунктирную линию с надписью «уменьшить смещение». Один операционный усилитель создает наклонную линию, а второй операционный усилитель создает минимальное напряжение. Выходы операционного усилителя подключены к транзисторам таким образом, что доминирует операционный усилитель, требующий более высокого выходного напряжения. Следующие уравнения позволяют определить номиналы резисторов:
Для условия R2< R2 = R1(A v V temp0 – V y-intB )/[(A v -1)(V ref – V temp0 + V y-intB /A v )],
и R3 = R2(A v -1), где R1 — любое разумное значение, A v = 0,114/0,0119 = 9,58 — это отношение желаемого наклона
в В/°C к датчику температуры, V temp0 = 0,744 В — напряжение датчика температуры при 0°C, V y-intB = 6,86 В — точка пересечения с осью y, обозначенная
искомая (экстраполированная) температурная кривая и V ref = 3,0 В — опорное напряжение. Таким образом, выбрав R1 = 301 кОм
позволяет рассчитать R2 = 3,158 кОм
и R3 = 27,09 кОм. Ближайший
1% значения составляют 3,16 кОм и
27,0 кОм соответственно. Следующее уравнение позволяет рассчитать напряжение пола: R5 = R6(V этаж – V исх. )/(V исх. ),
где R6 равно любому разумному значению, а V пол = 8В – желаемое минимальное выходное напряжение. Таким образом, выбрав R6 = 100 кОм
позволяет рассчитать R5 = 169 кОм. В некоторых случаях требуемое усиление смещения больше, чем требуемое усиление наклона, поэтому необходимо увеличить естественное смещение датчика температуры. Для желаемой температурной кривой “C”, выраженной как: Vfan = (0,114 В/°C) (температура + 8,5 В), усиление (наклон) A v = 9,58 такое же, как и для линии «B», но необходимое усиление смещения (8,5 В/0,744 В = 11,42) больше. Поэтому вы используете версию схемы «увеличение смещения».