Сборка электросамоката своими руками – статьи об электротранспорте
Сегодня на рынке есть достаточно большое количество заводских электросамокатов и выбрать можно на любой вкус и кошелёк.
Но любой товар как известно рассчитан под усреднённого покупателя.
Один складной и лёгкий, но медленно едет и не стартует с места.
Второй прекрасно стартует и разгоняется, но слишком тяжёл.
Что делать, если хочется самокат именно под свои запросы ?
Варианта два – либо брать заводской и дорабатывать, либо собирать аппарат самому с нуля.
Оба варианта имеют право на жизнь и каким путём пойти – личный выбор каждого.
Я же постараюсь обрисовать каким образом комплектуется набор элементов для самостоятельной сборки.
Главный элемент собираемого самоката это «база».
Базы самокатов условно делятся на подвиды:
Микро – с колёсами до 8 дюймов,
Мини – колёса 8-10 дюймов,
Миди – 12-16 дюймовые,
Макси – от 20 дюймов и больше.
Немного особняком стоят самокаты с широкой, не велосипедной резиной. Рино, Эво, Скрузер и их клоны тоже числятся самокатами, хотя по мощности двигателей и внешнему виду они явно ближе к мотороллерам и скутерам.
Итак база, именно от неё следует начинать плясать.
От выбора базы зависят итоговые ходовые качества электросамоката.
На что в первую очередь следует обратить внимание ?
Размерность колёс, литые или надувные, наличие подвески, место для удобного расположения акб и ширина дропаутов для установки мотор-колеса.
Если в вашем городе зеркальный асфальт который каждый вечер моют шампунем то 5.5 дюймов вам вполне подойдёт.
Если плитка и трещины в асфальте – 8 дюймов это минимум и очень желательна пневматика.
Если ваш асфальт последние лет 10 не знал ремонта – ниже 12 дюймов даже и не смотрите.
Хотите ехать на скорости 40 с хвостиком и не бояться полететь кубарем на неожиданной ямке ? От 16 дюймов и выше.
Подвеска частично снижает удары от неровности на маленьких колёсах, но правило «колесо может переехать препятствие не выше половины своего диаметра» никуда не денется.
Расположение акб. Варианты – в деке, в рулевой стойке, на руле в сумке или кейсе, на багажнике, в рюкзаке.
Некоторые самокаты имеют полость в деке, которая позволяет использовать её для упаковки туда сборки аккумуляторов.
Плюсы – низкий центр тяжести, внешний вид. Минусы – бывает необходима дополнительная защита акб от ударов о выступы дорожного полотна.
В рулевой стойке можно расположить акб, если она состоит из нескольких труб и между ними есть свободное пространcтво. Плюсы – акб ощутимо не влияет на развесовку самоката, при изготовлении облицовки самокат не боится падений. Минусы – трудоёмкость работ.
Также некоторые самокаты имеют крепления для бутылки на рулевой стойке, куда можно прикрутить кейс или акб в «бутылке». Плюсы – простота монтажа, легкосъёмность. Минусы – мешает при езде, при падении можно отломить крепления.
На руле в кейсе можно расположить акб. Плюсы – простота монтажа, легкосъёмность. Минусы – ухудшение развесовки, более ощутимые удары в переднее колесо. При падении есть вероятность разбить корпус.
При падении есть вероятность разбить корпус.
На руле в сумке как правило делаются акб для маленьких и складных самокатов. Сумка для фототехники достаточная для небольшого акб и не привлекает к себе внимания. Плюсы – простота монтажа, Минусы – риск повреждения акб при падении.
Аккумулятор на багажнике сзади – популярное решение первых электровелосипедов. Для самокатов малоактуально, за счет отсутствия багажника на большинстве из них. Плюсы – простота монтажа, легкосъёмность. Минусы – изменение развесовки, ощутимые удары в заднее колесо.
Также возможно и катание с аккумулятором в рюкзаке и проводом с разъёмом на сам самокат. Плюсы – возможность утеплить акб для использования в зимний период. Облегчение самоката, за счёт чего ощутимо повышается манёвренность и раположенность к активному катанию с прыжками. Минусы – заболевания позвоночника от постоянной нагрузки (зависит от веса акб), изменение развесовки на сторону мотор-колеса.
Ширина дропаутов.
Это расстояние между посадочными местами в передней или задней вилке самоката.
От выбранной категории базы будет зависеть и посадочный размер мотор-колеса самоката.
Для моделей микро и мини стандарт мотор-колёс 45 или 65 мм. Для того что больше – 100 мм.
Велосипедные мк под переднее колесо как раз также имеют стандарт 100мм.
Бывают мк 110, с тормозным диском, но реже.
135мм это уже велосипедный размер заднего колеса, под шестерни с одной стороны.
Электрическая часть электросамоката довольно проста, 4 пункта – аккумулятор, контроллер, мотор и органы управления.
Раньше аккумуляторы ставились свинцовые, тяжёлые, с низким ресурсом 300-400 циклов и малыми токами заряда-разряда.
Современные электросамокаты ездят на разновидностях литиевых акб – литий-ион, литий-полимер, литий-железофосфат.
Рассмотрим разницу в них.
Литий-полимерные (LiPo) акб имеют выгодную стоимость, высокие токи заряда и разряда, ресурс в 500-800 циклов.
Но пожароопасны. Не рекомендую применять их.
Литий-ион (LiIon) – 500-1000 циклов, малый вес, зависимость от температуры.
Вообще ионок есть три подвида, в зависимости от типа химии. У одних выше ёмкость, но больше внутреннее сопротивление, другие высокотоковые, но ёмкостью не блещут.
Требуют защиты от механических повреждений при применении на самокатах.Бывали случаи возгорания ионок от ударов при падении.
Литий-железофосфат (LiFePo4) – Примерно вдвое тяжелее ионок, дороже. Выдают и принимают большие токи, ресурс 2000 циклов.
Не пожароопасен, довольно стоек к механическим деформациям. Можно разряжать при минусовых температурах.
Мотор.
Привод колеса самоката от внешнего мотора ремнём или цепью еще встречается, но уже явно проигрывает позиции мотор-колёсам.
Мотор-колесо лучший выбор мотора для самосборного электросамоката.
Они бывают двух типов – редукторные и прямого привода. Разберем разницу, плюсы и минусы каждого типа.
Редукторные мк.
Легче чем мк прямого привода той-же мощности, лучше кпд на малых скоростях. Отличный накат, за счёт наличия фривила, что очень полезно при использовании самоката на ножной тяге. Есть изнашивающиеся детали – шестерни, когда-нибудь они потребуют замены. Шум – редуктор подвывает при работе. Невозможность рекуперативного торможения. Немного лучший потенциал форсирования, за счет больших оборотов вращения.
Есть изнашивающиеся детали – шестерни, когда-нибудь они потребуют замены. Шум – редуктор подвывает при работе. Невозможность рекуперативного торможения. Немного лучший потенциал форсирования, за счет больших оборотов вращения.
Прямой привод (DD).
Тяжелее редукторников, накат хуже из-за зубцового эффекта. Изнашивающихся деталей кроме подшипников в таких мк нет. Малошумные, а при использовании синусного контроллера могут быть вообще бесшумными. Имеют возможность использовать торможение рекуперацией. Оправдывают себя при использовании самоката в местности с большими перепадами высот и как средство экономии тормозных колодок. При установке мк на мини и микро самокаты бывает что рекуперация – единственный адекватный тормоз на борту.
Контроллер.
Контроллер это мозги нашего самоката, от его выбора будет зависеть тяга в горки, способ старта и динамика разгона. Выбор контроллера должен быть сделан по параметрам мотора. Например мотор-колесо имеет параметры: 48V 350W, что это значит ?
48V.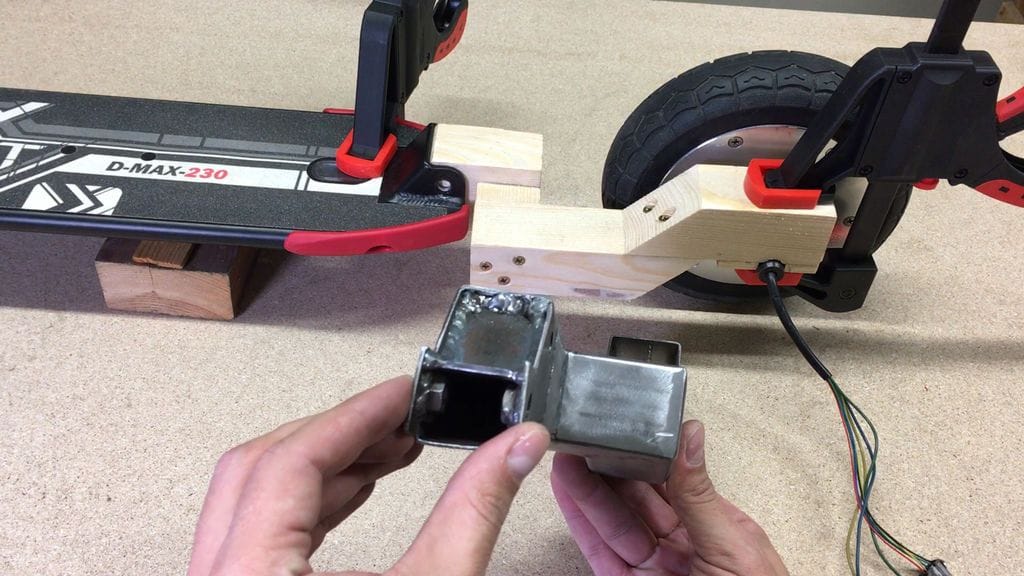
Номинальное напряжение мотор-колеса 48 вольт. Никто не запрещает подавать на него меньше, но при этом будет ниже его мощность. Никто не запрещает подавать на него больше, но при этом важно не перегреть мк вкачиваемой мощностью.
350W.
Это номинальная мощность данного мк. Как показывает практика номинальную мощность можно форсировать в 1.5-2 раза у DD и в 2-2.5 у редукторников. Для выбора контроллера переведём ватты в амперы – 350/48= 7.3 ампера. На 7.3 ампера оно конечно ехать будет, но довольно печально, поэтому форсируем его до 12-15 ампер для прямого привода и 15-18 для редукторника. На эти токи нам и будет нужно искать контроллер под такое мк.
Органы управления.
1 – выключатель питания.
Силовое питание как правило подключено на контроллер напрямую и не разрывается при простое. Выключатель питания отключает слаботочную часть контроллера, подающую напряжение на схему управления. Так как токи там небольшие можно использовать практически любую подходящую кнопку с фиксацией.
2 – Газулька.
Представляет собой ручку газа мотоциклетного типа, или половинчатую или курок газа. Я настойчиво рекомендую выбирать именно курок, так как его легко отпустить в экстренной ситуации, а ручку человек инстинктивно обхватывает плотнее, чтобы удержаться. Имеет по меньшей мере три провода – плюс 5 вольт, земля и выходной сигнал.
3 – Тормозные ручки.
На электросамокаты устанавливаются тормозные ручки с встроенными концевиками, для отключения мотора при нажатии тормоза. Если контроллер имеет активированный режим торможения рекуперацией – он также будет включаться при нажатии любой тормозной ручки. Бывают с встроенными кнопками, с герконами и с датчиками холла. Подключение – масса, выходной сигнал. Для датчиков холла дополнительно подключается + 5 вольт. Иногда для того чтобы не менять штатные ручки устанавливаются отдельные модули с герконами или датчиками холла. Крепятся они на трос, или на корпус ручек.
Итак мы разобрались с общим устройством электрики.
Рассмотрим примеры сборки.
В данном проекте использована база Yedoo Ox,ячейки акб литий-железофосфати мк прямого привода, диаметром 12 дюймов.Акб разделён на два пака и размещён в деке и в рулевой стойке.
Контроллер закреплён под рулевой стойкой, там он не мешает и всегда обдувается воздушным потоком.
Привод – задний, это удобное решение для подъёма в горки. Акб снизу защищен пластиной алюкобонда 4мм.Итоговые характиристики самоката:Вес 18.5 кг.
Акб 16S3P, 52 вольта 9 ампер-час.
Запас хода – 25 км.
Максимальная скорость – 30км\ч.
Следующая работа.
База – Yedoo Mezeq new.Акб из пакетов LiFePo4 9 а\ч.Вес – 23 кг.
Акб – 16S1P 52 вольта 9 ампер\час.
Запас хода – 30-35 км.
Максимальная скорость – 36 км\ч.
Третий собранный самокат.
База – Yedoo OX new.
Акб из ионок 18650.
Собраны в кейсе.Кейс зареплён на руле.Мотор – редукторник в литом ободе 12 дюймов.
Итоговые характеристики:Вес – 15 кг.
Акб – 13S5P LiIon 48 вольт 11 ампер\час.
Запас хода – 40 км.
Максимальная скорость – 38 км\ч.
Следующий проект.
База – Yedoo City.Акб – литий ионки 18650, собраны в рулевой стойке.Снизу установлена защита пластиной алюкобонда 4мм. На ней же стоит и контроллер.Сверху изготовлен защитный короб из алюкобонда 3мм.
Мотор – редуторник в литом колесе 12 дюймов.
Итоговые характеристики:Вес 16.5 кг.
Акб LiIon 14S5P 52 вольта 11 ампер\час.
Запас хода 40-45 км.
Максималка за 40 км\ч.
для перевозки тяжелых и габаритных грузов
Грузовой самокат с электроприводом предназначен для транспортировки тяжелых и габаритных грузов.
Например, можно перевозить:
- мешки с цементом;
- коробки с вещами;
- ящики с рассадой;
- тротуарную плитку;
- стеновые блоки или кирпич.
Для чего нужен грузовой самокат
По «умолчанию» (а если быть точнее — по задумке автора) самодельный грузовой самокат создан для грузоперевозок на короткие дистанции в пределах частного дома или домашней мастерской.
Однако в случае необходимости на нем можно и в ближайший магазин сгонять за продуктами или какими-либо стройматериалами.
Кому подойдет данный вид техники
Грузовой самокат пригодится людям, которые не хотят лишний раз таскать тяжести (или же не могут по состоянию здоровья).
Но при этом подойдет такой вид техники не всем.
Дело в том, что если придомовая территория не очень большая, а мастерская — размером с гараж, то электросамокату попросту негде будет «разогнаться». Ну и, соответственно, толку от него будет мало.
Ну и, соответственно, толку от него будет мало.
Какие материалы потребуются для изготовления самоката
Большую часть материалов можно использовать по собственному усмотрению, в зависимости от того, у кого что имеется в наличии.
Однако есть и обязательные комплектующие:
- приводное колесо-мотор от электровелосипеда;
- пара поворотных колес, которые используются для грузовой тележки;
- руль от велосипеда;
- сиденье;
- аккумуляторы (источники питания для электропривода).
Из каких частей состоит грузовой самокат
Конструкция представляет собой несущую раму с тремя колесами.
Приводное колесо располагается сзади, а поворотные колеса — спереди. Они с помощью тяг соединены с рулем.
Спереди грузового самоката находится площадка для перевозки грузов.
В промежутке между сиденьем и рулем к раме приварен металлический ящик, внутри которого находятся аккумуляторы.
Как сделать грузовой самокат своими руками
Сначала изготавливается часть рамы, которая будет выполнять роль опорной площадки для перевозки грузов.
К нижней части приваривается кусок профтрубы, к которому крепится пара поворотных колес от грузовой тележки.
После этого изготавливается основная часть несущей рамы (из профильной трубы). Устанавливаем приводное колесо-мотор.
На следующем этапе необходимо будет установить руль и сиденье. Из листового металла свариваем ящик для аккумуляторов.
В завершении останется только зачистить места сварки болгаркой, и покрасить раму. К опорной площадке сверху прибиваем доски.
Устанавливаем замок зажигания, ручку газа и обязательно монтируем тормозную систему.
Видео по теме
Мне нравится10Не нравится2
Андрей Васильев
Задать вопрос
Как сделать самокат из дерева.
 Самодельный самокат из старых велосипедов своими руками
Самодельный самокат из старых велосипедов своими рукамиСамодельный электросамокат сделанный своими руками из двигателя электродрели и редуктора от болгарки: фото сборки, а также видео испытаний самоката.
Электросамокаты постепенно входят в нашу повседневную жизнь, на улицах можно встретить такие аппараты не только для детей, но и для взрослых. Да и некоторые обладатели этих устройств, ездят на работу минуя пробки на дорогах, ведь запаса хода такого транспортного средства хватает на 15 — 20 км и заправлять его бензином не нужно.
Промышленные варианты самокатных устройств которые есть в продаже, стоят не дёшево, но для наших народных умельцев построить самокат на электротяге из подручных материалов не проблема и в этой статье мы рассмотрим такую самоделку.
- Обычный самокат китайского производства.
- Электродрель, работающая от аккумулятора 12V.
- Ось и редуктор от болгарки.
- Обгонная муфта «Бендикс» от стартера автомобиля.

- Подшипники для роликового колеса – 3 шт.
- Литий-полимерный аккумулятор — 12V и 2,2 А.
- Провода.
- Алюминиевые уголки.
- Болты, гайки, заклёпки.

Обгонная муфта здесь нужна, чтобы при отключении двигателя колесо самоката не останавливалось и не тормозило, а продолжало вращение.
Обратите внимание! Бендикс может быть левосторонний или правосторонний, его нужно подбирать в зависимости от направления вращения.
Соединил ось от болгарки с колесом самоката, для этого подшипник колеса приварил к оси, также заварил внутри сам подшипник, чтобы он не вращался. Колесо намертво зафиксировано на оси чтобы передавался крутящий момент на колесо.
Ось колеса посажена на два подшипника закреплённых алюминиевыми уголками на раме самоката.
Теперь нужно соединить ось редуктора двигателя с бендиксом.
В оси редуктора двигателя просверлил (перпендикулярно оси) отверстие 3. 3 мм, и забил в него кусок сверла.
3 мм, и забил в него кусок сверла.
В самом бендиксе сделал продольный пропил чтобы вошла ось с куском сверла, получилось что-то вроде карданного соединения.
На раме закрепил литиево-полимерный аккумулятор.
На руле установил кнопку регулятора оборотов от электродрели, подключается регулятор просто, два провода идут на электродвигатель и ещё два на сам аккумулятор.
Фотография электросамоката своими руками из готового набора
Самокат с электроприводом – игрушка, которая интересна не только детям, но и взрослым. Она дает свободу передвижения по дорогам с любым покрытием, доставляя массу удовольствий от езды. Конечно, рассматривать этот девайс в качестве основного средства передвижения, не стоит, но прокатиться на нем, получив массу удовольствия, кто-то откажется едва ли. Моделей электросамокатов для детей и взрослых в торговой сети достаточно, поэтому каждый может выбрать его по своему предпочтению. Если же «руки на месте», возможно, вам захочется электросамокат своими руками . Это вполне посильная работа, результат которой доставит удовольствия вдвое больше, чем при покупке готового транспортного средства.
Если же «руки на месте», возможно, вам захочется электросамокат своими руками . Это вполне посильная работа, результат которой доставит удовольствия вдвое больше, чем при покупке готового транспортного средства.
Вряд ли захочется мастерить электрический самокат для взрослого. Но, для ребенка такая игрушка будет верхом мечтаний.
Мотор для самоката сегодня не проблема приобрести, но, если шуроповерт, то моторчика его будет достаточно. Затем необходимо определиться с предпочтительным вариантом вращающего момента: с помощью двух шестерен, цепи или специальной насадки (фрикционная передача). Подойдет и вариант прямого вращения, т. е. использования гибкого тросика, от спидометра авто, например. Дорогостоящий вариант мотор-колесо чаще отпадает сразу.
Попутно решить нужно вопрос о том, какое колесо нужно вращать? Для самоката не столь критично, какое из колес – переднее или заднее будет вращаться, но второй вариант, кажется более правильным, поскольку на заднее колесо можно установить тормоз.
Для конструкции вполне достаточно 14В, значит, можно выбрать конфигурацию 4S1P: разобрав болгарку и аккумуляторную дрель. Сняв с дрели все, получим мотор с редуктором, а удалив корпус с болгарки, будете иметь ось с ротором и с коническими шестернями редуктор. Осью самокатного колеса будет ось ротора, а та часть, куда насаживается диск, будет подключаться к мотору. Сделав эти манипуляции, можно считать, что пол самоката готово. Серьезной проблемой является – аккумулятор. Вряд ли здесь подойдет тяжелый свинцовый, поэтому нужно отправляться в магазин радиодеталей за литиевым аккумулятором (прекрасно подойдет аккумулятор от электрического вертолета LiPoly ). Закрепить его можно на руле, где часто устанавливают корзины для небольших вещей. Нет необходимости придумывать регулятор скорости, поскольку им становится штатная кнопка регулятора оборотов.
Еще немного поколдовав, можно получить то, ради чего было разобрана большая часть инструмента в доме.
Отзыв
Имея техническое образование, я рискнул «создать» электросамокат для своего сынишки.
Николай Чередниченко, житель Иваново
 Не скажу, что все у меня прошло «как по маслу», поскольку повозиться пришлось. Но, в итоге, игрушка готова и уже испытана в действии, что вызывает у меня заслуженное чувство гордости.
Не скажу, что все у меня прошло «как по маслу», поскольку повозиться пришлось. Но, в итоге, игрушка готова и уже испытана в действии, что вызывает у меня заслуженное чувство гордости.Прикольный самокат или проект «катало» для ребенка от 2 до 4 лет. Самокат табуретка был сделан на день рождения. Самоделка полностью повторяет игрушку производимую в Англии торговое название Zoomster. Стоимость игрушки и ее доставка сделали рентабельной работу своими руками. Конструкция и крепеж был определен из наличия материалов на момент строительства самоката своими руками. Мастер раскрывает все секреты строительства и модернизации самоката. Как всегда присутствует пошаговая инструкция изготовления деталей и сборки каталы своими руками с видео, чертежом шаблоном и большим числом фото.
Как сделать самокат табуретку для ребенка своими руками
Материалы и инструмент
Подбирая подарок ребенку на просторах интернета нашел что искал — самокат табуретку. Но вот только цена игрушки и некитайская доставка из Англии заставили задуматься и конкретно сэкономить на покупке, сделав самокат своими руками. Поиск в интернете чертежей не дал результата. Видно игрушка доступна родителям во всем остальном мире. Собрав в интернете все фотографии самоката составил эскиз и вырезал два шаблона из гофрокартона для выпиливания основных деталей изделия под кодом проекта «Катало». Смотрите фото.
Но вот только цена игрушки и некитайская доставка из Англии заставили задуматься и конкретно сэкономить на покупке, сделав самокат своими руками. Поиск в интернете чертежей не дал результата. Видно игрушка доступна родителям во всем остальном мире. Собрав в интернете все фотографии самоката составил эскиз и вырезал два шаблона из гофрокартона для выпиливания основных деталей изделия под кодом проекта «Катало». Смотрите фото.
В целях экономии средств применен доступный под рукой материал: куски 10 — 12 мм фанеры, обрезки досок, саморезы и мебельные шурупы. Специально были куплены под проект мебельные ролики. Для изготовления применен следующий инструмент:
- электролобзик;
- шлифовальная машинка;
- дрель шуруповерт с комплектом сверл и зенковок, применен инструмент марки ;
- строительный нож.
Подготовка деталей для самоката проекта Катало
Начертил на кусках фанеры по шаблону контуры будущих деталей.
Проект КАТАЛО.
 Перенос контуров боковинки
Перенос контуров боковинки Проект КАТАЛО. Перенос контуров основания
Потребуется выпилить четыре основных детали для проекта — основание, сидение (размер 240 × 150 мм) и две боковины. А также три перегородки шириной 116 мм и высотой 170, 70, 50 мм соответственно. Работы выполняются электролобзиком. После выпиливания детали самоката, особенно края, шлифуются.
Все работы лучше проводить под вытяжкой или на открытом воздухе. В боковинах просверлил два отверстия диаметром 25 мм под палку руля, а также два отверстия в основании для буксировки.
Палку руля символически вырезал ножом из ручки бытовой швабры за которую будет держаться уже четвертое поколение членов семьи.
Длина ручки 350 мм. После подготовки деталей полезно совместить все их и проверить плотность из примыкания дуг к другу.
Сборка деталей самоката табуретки
Сборка проводилась саморезами и мебельными шурупами.
После совмещения деталей самоката карандашом отмечаются места соединения и задаются точки крепления. Сначала собирается верхняя часть самоката. Сверлятся отверстия в прикрепляемых деталях, зенкуются отверстия для утопления потайных головок саморезов. На ровной горизонтальной поверхности детали боковин, сиденья и перегородок соединяются вместе. Не забудьте вставить руль.
Проект КАТАЛО. Верхняя часть самоката собрана
Далее по разметке сверлятся отверстия в основании для крепления верхней части самоката. Для надежности присоединение выполнено мебельными шурупами. Подробности работы с мебельными шурупами найдете по этой .
Установка колес на самокат табуретку
К вопросу крепления колес — мебельных роликов надо отнестись со всей серьёзностью. Трудность обусловлено толщиной основания. Саморез с круглой головкой при креплении не должен провернуться. Для этого намечаются точки крепления роликов по углам основания. В точках крепления сверлятся тонкие отверстие. При закручивании саморезов в шуруповерте подбирается соответствующее положение срабатывания трещетки. Длина саморезов 10мм.
В точках крепления сверлятся тонкие отверстие. При закручивании саморезов в шуруповерте подбирается соответствующее положение срабатывания трещетки. Длина саморезов 10мм.
Первоначально на самокат были установлены ролики как на оригинале, но опыт эксплуатации показал, что разумнее свободно вращающиеся ролики надо ставить только спереди, а в зоне сидения лучше поставить фиксированные ролики. Смотрите фото.
Проект КАТАЛО. Модернизированный вариант ходовой части самоката
Опыт эксплуатации
В рекламе самоката ставился рекомендованный возраст для ребенка от 1,5 до 5 лет, а некоторые перекупщики предлагали возраст возраст от 1 года. Фактически ребенок начинает справляться с игрушкой после двух лет. Полуторогодовалый ребенок не достает до пола, а если и достает, то сил толкаться у него не хватает. Думаю вопросов не должно возникать, что это самокат паркетник и его место в помещении на ровном полу. Краткая видео подборка с самокатом показана ниже. В возрасте 1,5 года ребенок не достает до пола. В два года ребенок уже справляется с игрушкой. В три года ребенок использует игрушку по полной схеме. Смотрите видео.
В возрасте 1,5 года ребенок не достает до пола. В два года ребенок уже справляется с игрушкой. В три года ребенок использует игрушку по полной схеме. Смотрите видео.
Ребенок ценит самокат и как транспортное средство, как табурет и место хранения любимых игрушек. Игровые моменты с перевозом и букировкой игрушек и «грузов» легко усваиваются и используются. С четырех лет интерес к игрушке угас. Скорость и дальность передвижения на уличном самокате или беговеле поставила самокат табуретку в тень. Мастер рекомендует подобную игрушку. Время изготовления игрушки проекта Катало 2-4 вечера. В заключение посмотрите видео версию строительства самоката «Катало»
Сегодня на рынке есть достаточно большое количество заводских электросамокатов и выбрать можно на любой вкус и кошелёк.
Но любой товар как известно рассчитан под усреднённого покупателя.
Один складной и лёгкий, но медленно едет и не стартует с места.
Второй прекрасно стартует и разгоняется, но слишком тяжёл.
Что делать, если хочется самокат именно под свои запросы?
Варианта два – либо брать заводской и дорабатывать, либо собирать аппарат самому с нуля.
Оба варианта имеют право на жизнь и каким путём пойти – личный выбор каждого.
Я же постараюсь обрисовать каким образом комплектуется набор элементов для самостоятельной сборки.
Главный элемент собираемого самоката это «база».
Базы самокатов условно делятся на подвиды:
Микро – с колёсами до 8 дюймов,
Мини – колёса 8-10 дюймов,
Миди – 12-16 дюймовые,
Макси – от 20 дюймов и больше.
Немного особняком стоят самокаты с широкой, не велосипедной резиной. Рино, Эво, Скрузер и их клоны тоже числятся самокатами, хотя по мощности двигателей и внешнему виду они явно ближе к мотороллерам и скутерам.
Итак база, именно от неё следует начинать плясать.
От выбора базы зависят итоговые ходовые качества электросамоката.
На что в первую очередь следует обратить внимание?
Размерность колёс, литые или надувные, наличие подвески, место для удобного расположения акб и ширина дропаутов для установки мотор-колеса.
Если в вашем городе зеркальный асфальт который каждый вечер моют шампунем то 5.5 дюймов вам вполне подойдёт.
Если плитка и трещины в асфальте – 8 дюймов это минимум и очень желательна пневматика.
Если ваш асфальт последние лет 10 не знал ремонта – ниже 12 дюймов даже и не смотрите.
Хотите ехать на скорости 40 с хвостиком и не бояться полететь кубарем на неожиданной ямке? От 16 дюймов и выше.
Подвеска частично снижает удары от неровности на маленьких колёсах, но правило «колесо может переехать препятствие не выше половины своего диаметра» никуда не денется.
Расположение акб. Варианты – в деке, в рулевой стойке, на руле в сумке или кейсе, на багажнике, в рюкзаке.
Некоторые самокаты имеют полость в деке, которая позволяет использовать её для упаковки туда сборки аккумуляторов.
Плюсы – низкий центр тяжести, внешний вид. Минусы – бывает необходима дополнительная защита акб от ударов о выступы дорожного полотна.
В рулевой стойке можно расположить акб, если она состоит из нескольких труб и между ними есть свободное пространcтво. Плюсы – акб ощутимо не влияет на развесовку самоката, при изготовлении облицовки самокат не боится падений. Минусы – трудоёмкость работ.
Плюсы – акб ощутимо не влияет на развесовку самоката, при изготовлении облицовки самокат не боится падений. Минусы – трудоёмкость работ.
Также некоторые самокаты имеют крепления для бутылки на рулевой стойке, куда можно прикрутить кейс или акб в «бутылке». Плюсы – простота монтажа, легкосъёмность. Минусы – мешает при езде, при падении можно отломить крепления.
На руле в кейсе можно расположить акб. Плюсы – простота монтажа, легкосъёмность. Минусы – ухудшение развесовки, более ощутимые удары в переднее колесо. При падении есть вероятность разбить корпус.
На руле в сумке как правило делаются акб для маленьких и складных самокатов. Сумка для фототехники достаточная для небольшого акб и не привлекает к себе внимания. Плюсы – простота монтажа, Минусы – риск повреждения акб при падении.
Аккумулятор на багажнике сзади – популярное решение первых электровелосипедов. Для самокатов малоактуально, за счет отсутствия багажника на большинстве из них. Плюсы – простота монтажа, легкосъёмность.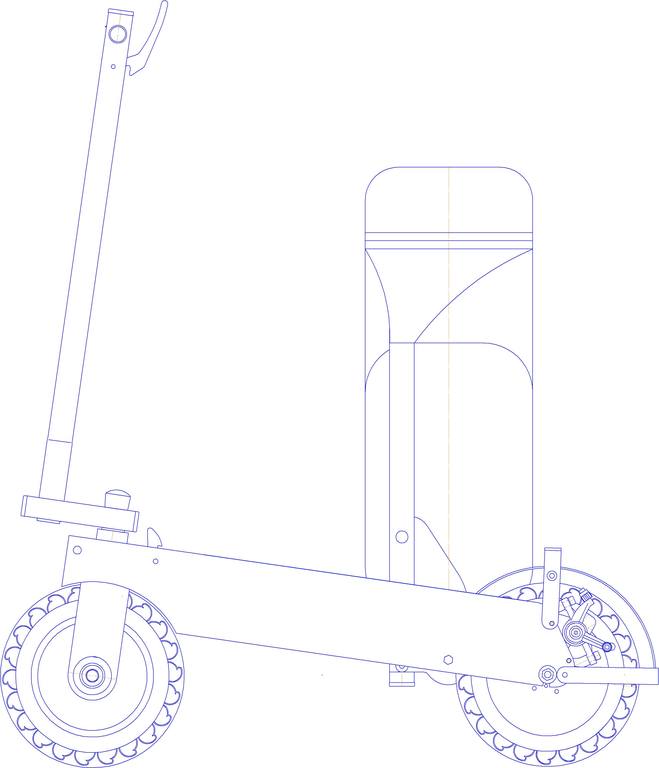 Минусы – изменение развесовки, ощутимые удары в заднее колесо.
Минусы – изменение развесовки, ощутимые удары в заднее колесо.
Также возможно и катание с аккумулятором в рюкзаке и проводом с разъёмом на сам самокат. Плюсы – возможность утеплить акб для использования в зимний период. Облегчение самоката, за счёт чего ощутимо повышается манёвренность и раположенность к активному катанию с прыжками. Минусы – заболевания позвоночника от постоянной нагрузки (зависит от веса акб), изменение развесовки на сторону мотор-колеса.
Ширина дропаутов.
Это расстояние между посадочными местами в передней или задней вилке самоката.
Для моделей микро и мини стандарт мотор-колёс 45 или 65 мм. Для того что больше – 100 мм.
Велосипедные мк под переднее колесо как раз также имеют стандарт 100мм.
Бывают мк 110, с тормозным диском, но реже.
135мм это уже велосипедный размер заднего колеса, под шестерни с одной стороны.
Электрическая часть электросамоката довольно проста, 4 пункта – аккумулятор, контроллер, мотор и органы управления.
Раньше аккумуляторы ставились свинцовые, тяжёлые, с низким ресурсом 300-400 циклов и малыми токами заряда-разряда.
Современные электросамокаты ездят на разновидностях литиевых акб – литий-ион, литий-полимер, литий-железофосфат.
Рассмотрим разницу в них.
Литий-полимерные (LiPo) акб имеют выгодную стоимость, высокие токи заряда и разряда, ресурс в 500-800 циклов.
Литий-ион (LiIon) – 500-1000 циклов, малый вес, зависимость от температуры.
Вообще ионок есть три подвида, в зависимости от типа химии. У одних выше ёмкость, но больше внутреннее сопротивление, другие высокотоковые, но ёмкостью не блещут.
Требуют защиты от механических повреждений при применении на самокатах.Бывали случаи возгорания ионок от ударов при падении.
Литий-железофосфат (LiFePo4) – Примерно вдвое тяжелее ионок, дороже. Выдают и принимают большие токи, ресурс 2000 циклов.
Не пожароопасен, довольно стоек к механическим деформациям. Можно разряжать при минусовых температурах.
Привод колеса самоката от внешнего мотора ремнём или цепью еще встречается, но уже явно проигрывает позиции мотор-колёсам.
Мотор-колесо лучший выбор мотора для самосборного электросамоката.
Они бывают двух типов – редукторные и прямого привода. Разберем разницу, плюсы и минусы каждого типа.
Редукторные мк.
Легче чем мк прямого привода той-же мощности, лучше кпд на малых скоростях. Отличный накат, за счёт наличия фривила, что очень полезно при использовании самоката на ножной тяге. Есть изнашивающиеся детали – шестерни, когда-нибудь они потребуют замены. Шум – редуктор подвывает при работе. Невозможность рекуперативного торможения. Немного лучший потенциал форсирования, за счет больших оборотов вращения.
Прямой привод (DD).
Тяжелее редукторников, накат хуже из-за зубцового эффекта. Изнашивающихся деталей кроме подшипников в таких мк нет. Малошумные, а при использовании синусного контроллера могут быть вообще бесшумными. Имеют возможность использовать торможение рекуперацией. Оправдывают себя при использовании самоката в местности с большими перепадами высот и как средство экономии тормозных колодок. При установке мк на мини и микро самокаты бывает что рекуперация – единственный адекватный тормоз на борту.
Оправдывают себя при использовании самоката в местности с большими перепадами высот и как средство экономии тормозных колодок. При установке мк на мини и микро самокаты бывает что рекуперация – единственный адекватный тормоз на борту.
Контроллер.
Контроллер это мозги нашего самоката, от его выбора будет зависеть тяга в горки, способ старта и динамика разгона. Выбор контроллера должен быть сделан по параметрам мотора. Например мотор-колесо имеет параметры: 48V 350W, что это значит?
Номинальное напряжение мотор-колеса 48 вольт. Никто не запрещает подавать на него меньше, но при этом будет ниже его мощность. Никто не запрещает подавать на него больше, но при этом важно не перегреть мк вкачиваемой мощностью.
Это номинальная мощность данного мк. Как показывает практика номинальную мощность можно форсировать в 1.5-2 раза у DD и в 2-2.5 у редукторников. Для выбора контроллера переведём ватты в амперы – 350/48= 7.3 ампера. На 7.3 ампера оно конечно ехать будет, но довольно печально, поэтому форсируем его до 12-15 ампер для прямого привода и 15-18 для редукторника. На эти токи нам и будет нужно искать контроллер под такое мк.
На эти токи нам и будет нужно искать контроллер под такое мк.
Органы управления.
1 – выключатель питания.
Силовое питание как правило подключено на контроллер напрямую и не разрывается при простое. Выключатель питания отключает слаботочную часть контроллера, подающую напряжение на схему управления. Так как токи там небольшие можно использовать практически любую подходящую кнопку с фиксацией.
2 – Газулька.
Представляет собой ручку газа мотоциклетного типа, или половинчатую или курок газа. Я настойчиво рекомендую выбирать именно курок, так как его легко отпустить в экстренной ситуации, а ручку человек инстинктивно обхватывает плотнее, чтобы удержаться. Имеет по меньшей мере три провода – плюс 5 вольт, земля и выходной сигнал.
3 – Тормозные ручки.
На электросамокаты устанавливаются тормозные ручки с встроенными концевиками, для отключения мотора при нажатии тормоза. Если контроллер имеет активированный режим торможения рекуперацией – он также будет включаться при нажатии любой тормозной ручки. Бывают с встроенными кнопками, с герконами и с датчиками холла. Подключение – масса, выходной сигнал. Для датчиков холла дополнительно подключается + 5 вольт. Иногда для того чтобы не менять штатные ручки устанавливаются отдельные модули с герконами или датчиками холла. Крепятся они на трос, или на корпус ручек.
Бывают с встроенными кнопками, с герконами и с датчиками холла. Подключение – масса, выходной сигнал. Для датчиков холла дополнительно подключается + 5 вольт. Иногда для того чтобы не менять штатные ручки устанавливаются отдельные модули с герконами или датчиками холла. Крепятся они на трос, или на корпус ручек.
Итак мы разобрались с общим устройством электрики.
Рассмотрим примеры сборки.
В данном проекте использована база Yedoo Ox,
ячейки акб литий-железофосфат
и мк прямого привода, диаметром 12 дюймов.
Акб разделён на два пака и размещён в деке и в рулевой стойке.
Контроллер закреплён под рулевой стойкой, там он не мешает и всегда обдувается воздушным потоком.
Привод – задний, это удобное решение для подъёма в горки. Акб снизу защищен пластиной алюкобонда 4мм.
Итоговые характиристики самоката:
Вес 18.5 кг.
Акб 16S3P, 52 вольта 9 ампер-час.
Самокат, это конечно не , но позволяет очень сильно экономить силы на перемещении, особенно если использовать его постоянно.
Самодельный самокат прост в изготовлении, его стоимость минимальна, а выгода для здоровья организма просто неоценима! Ведь известно, что постоянные равномерные нагрузки укрепляют сердечную мышцу и повышают общий тонус организма. Самокат собранный своими руками очень сильно помогает поднять выносливость, если, конечно, его использовать ежедневно.
Деревянный самокат для поездок на работу. Самокат был сделан из фанеры 10 мм и мебельного щита 28 мм, последний пошел на опорную площадку.
Передняя вилка самоката взята стандартная от велосипеда (колесо 20 дюймов), заднее колесо меньшего диаметра (12 дюймов).
Самокат собран своими руками, в качестве крепежа использованы саморезы и мебельные уголки, кроме жтого все детали проклеены клеем ПВА.
За лето 2012 на самодельном самокате было пройдено больше 600 км.
К этому описанию стоит добавить, что такой самодельный самокат гораздо лучше покупного. Я не видел нормального самоката на пневматических шинах по приемлемой цене. Даже самокаты имеющие 2 подвеса (под каждое колесо) из Декатлона не позволяют ездить по траве или проселочной дороге, да и при езде по тротуарной плитке или выщербленному асфальту на проезжей части весьма сильно «стучат» и вибрируют, от чего очень быстро надоедает ехать.
Даже самокаты имеющие 2 подвеса (под каждое колесо) из Декатлона не позволяют ездить по траве или проселочной дороге, да и при езде по тротуарной плитке или выщербленному асфальту на проезжей части весьма сильно «стучат» и вибрируют, от чего очень быстро надоедает ехать.
Велосипедные колеса используемые в самодельном самокате позволяют избежать подобной тряски, а большой диаметр колес помогает на бездорожье. К тому же, вы сами можете спроектировать клиренс вашего самоката, если будете ездить по проселку – делайте его побольше!
При правильном изготовлении и последующей обработки лаком (желательно водостойким – например яхтенным) самодельный самокат будет служить вам долгие года!
Еще статьи для самодельщиков .
Самодельный электросамокат бесколлекторный arduino diy
0. ВВЕДЕНИЕ
Давайте построим наш электросамокат HOMEMADE. Это должен быть очень простой электронный проект. Самая сложная часть – это конструкция самоката и под этим я подразумеваю соединение бесщеточного двигателя с колесом. Вы увидите простой способ передать вращение двигателя колесу. Убедитесь, что вы прочитали всю дополнительную информацию, все схемы и загрузили коды и файлы STL 3D по ссылкам ниже в этом руководстве.Также прочтите все комментарии в коде, чтобы понять, как это работает.
Это должен быть очень простой электронный проект. Самая сложная часть – это конструкция самоката и под этим я подразумеваю соединение бесщеточного двигателя с колесом. Вы увидите простой способ передать вращение двигателя колесу. Убедитесь, что вы прочитали всю дополнительную информацию, все схемы и загрузили коды и файлы STL 3D по ссылкам ниже в этом руководстве.Также прочтите все комментарии в коде, чтобы понять, как это работает.
Используйте ССЫЛКИ в этом руководстве, чтобы покупать детали. Это тоже поможет моей мастерской, и цена для вас будет такой же. Большое тебе спасибо.
1. СПИСОК ДЕТАЛЕЙ
Хорошо, посмотрим, что нам нужно для этого проекта. Я объясню более одного варианта, поэтому вы найдете полный список деталей ниже. В зависимости от варианта, который вы выберете, вам придется покупать разные компоненты. Конечно, нам понадобится скутер.Я ворковал с большим, потому что я тяжелый парень. Обратите внимание, что цена в моем случае немного выше, потому что мне нужны большие и мощные детали (мой вес около 100 кг). Конечно, если вы весите около 60 кг, вам не понадобится ни мощный двигатель, ни много батарей.
Конечно, если вы весите около 60 кг, вам не понадобится ни мощный двигатель, ни много батарей.
Хорошо, ниже у вас есть ссылка на полный список деталей. Проверьте это и сделайте свою корзину покупок.
Полный список деталей здесь:
1.1 ДВА ВАРИАНТА
Я представлю вам два варианта.Ремень ГРМ + шестерни и система прямого шкива. Я выберу систему с прямым шкивом, так как мне это намного проще. В случае использования зубчатых ремней и шестерен вам придется установить шестерню между колесом и опорой скутера, и эта часть обычно бывает сложной. Также вам понадобится система натяжения, которая будет натягивать ремень. Вот почему я буду использовать систему прямого шкива с шкивом, напечатанным на 3D-принтере, который я спроектировал.
Хорошо, поэтому я выберу второй вариант со шкивом, напечатанным на 3D-принтере, который вы также можете скачать по ссылке ниже и распечатать самостоятельно.Следуйте инструкциям для печати. Вы найдете несколько примеров с разными размерами. Имейте в виду, что шкив большего диаметра даст большую максимальную скорость, но меньший крутящий момент. Я предпочитаю крутящий момент, поэтому я выберу небольшой шкив. В полном списке деталей вы найдете другие компоненты для ремня ГРМ и зубчатого шкива. Проверьте список деталей, прежде чем начинать этот проект.
Имейте в виду, что шкив большего диаметра даст большую максимальную скорость, но меньший крутящий момент. Я предпочитаю крутящий момент, поэтому я выберу небольшой шкив. В полном списке деталей вы найдете другие компоненты для ремня ГРМ и зубчатого шкива. Проверьте список деталей, прежде чем начинать этот проект.
2. Основная схема
Хорошо, теперь давайте посмотрим, как мы будем соединять все электронные компоненты.Нам нужно подать 14,8В от батареек на ESC. ESC будет подключен к бесщеточному двигателю, а также к Arduino, чтобы подать на него 5 В. К Arduino мы добавляем потенциометр, и все готово. Взгляните на схемы ниже. Есть два типа потенциометров, которые вы можете использовать. Все зависит только от вас. Если вы используете линейный скользящий потенциометр, просто добавьте эластичную резиновую ленту, и все готово. Если вы используете обычный потенциометр, вам следует распечатать файлы управления скоростью на 3D-принтере, которые вы также можете скачать по ссылке ниже. Распечатайте корпус, припаяйте потенциометр и вкрутите его внутрь корпуса. В футляре есть отверстия, чтобы его можно было прикрутить к рулю самоката. У вас есть несколько примеров фотографий ниже. Дополнительная часть, которую мы увидим позже, – это добавление счетчика скорости к этому Arduino с помощью магнитного датчика на колесе.
Распечатайте корпус, припаяйте потенциометр и вкрутите его внутрь корпуса. В футляре есть отверстия, чтобы его можно было прикрутить к рулю самоката. У вас есть несколько примеров фотографий ниже. Дополнительная часть, которую мы увидим позже, – это добавление счетчика скорости к этому Arduino с помощью магнитного датчика на колесе.
Я напечатал на 3D-принтере корпус потенциометра и установил его на руль самоката с помощью двух винтов диаметром 3 мм, в корпусе уже есть отверстия для гаек M3.
Как вы можете видеть на схеме выше, бесщеточный двигатель имеет трехфазный вход без полярности. Если двигатель вращается в противоположном направлении, просто поменяйте местами два провода друг с другом. Я рекомендую вам добавить конденсатор 100 мкФ на вывод 5V Arduino. Напряжение 5 В от BEC регулятора ESC может иметь некоторый шум с пиками, а крышка 100 мкФ улучшит напряжение.
Вам также понадобятся 3D детали для батарейного отсека, ссылка на это ниже. Этот футляр будет размещен на главной оси самоката. Конструкции представляют собой только верхнюю и нижнюю части корпуса. Эти детали можно будет прикрутить к металлической трубе, и тогда стороны будут сделаны из фанеры. Посмотрите фотографии строительства, чтобы узнать больше.
На следующей странице мы приступаем к постройке самоката. Убедитесь, что вы прочитали всю информацию в списке деталей и в 3D-проектах.
Собери самокат своими руками
С наплывом электрических скейтбордов и самокатов, которые захватили, казалось бы, каждый город, я начал думать, что это может быть что-то, что я могу купить для себя.В настоящее время очень доступно купить скутер, такой как версия Xiaomi Mi, примерно за 400 долларов, а также множество стартапов с потрясающим дизайном. Вместо этого я решил, что попробую создать свой собственный с нуля. Не для экономии денег, а для того, чтобы получить опыт создания чего-то собственного.
РИСУНОК 1. Самокат в сборе.
Самокат в сборе.
Этот проект начался в начале лета 2019 года, когда у меня появилась идея, и продолжался шесть месяцев, когда я закончил всю электронику и код.Хотя это был очень трудоемкий проект, мне понравилась каждая секунда процесса, и я с удовольствием показываю людям этот проект. Все, что мне сейчас нужно, это шлем!
Основная цель этой статьи – показать мой процесс проектирования и производства, чтобы вы могли извлечь уроки из того, что я создал. Я постарался максимально кратко изложить как можно больше информации о своем дизайне.
Физическая конструкция
Строительство электросамоката начинается с двух ключевых компонентов: рамы самоката и двигателя.Существует два основных типа моторных приводов для самокатов: с ременным / зубчатым приводом или с прямым приводом, например со ступичным двигателем. Я выбрал бесщеточный мотор-ступицу, который был разработан для использования на стандартном ховерборде. Основная причина, по которой я выбрал этот двигатель, заключается в его непревзойденном соотношении мощности и стоимости. Поскольку ховерборды производились массово, стоимость двигателя была на несколько порядков меньше, чем я мог найти где-либо.
Поскольку ховерборды производились массово, стоимость двигателя была на несколько порядков меньше, чем я мог найти где-либо.
Кроме того, было относительно просто сконструировать крепление, которое могло бы удерживать двигатель на поворотной оси.Я хотел, чтобы мотор был спереди, чтобы задний дисковый тормоз с ручным управлением работал. Этот ручной тормоз чрезвычайно важен для электросамоката в районах с большими холмами и опасным движением.
Самой большой механической проблемой, которую необходимо было преодолеть, была конструкция колесной арки. Поскольку я выбрал мотор-ступицу, опора мотора должна была выдерживать вес пользователя в дополнение к крутящему моменту двигателя, ускоряющемуся и вращающемуся. При покупке самокат имел слабое колесо в сборе, которое было нелегко модифицировать для поддержки моторизованного колеса. На рис. 2 показан узел колеса, вырезанный из штампованного шестигранника.
РИСУНОК 2. OEM колесо в сборе, распиленное ленточной пилой.
Затем я использовал большой кусок алюминия и сконструировал раму, на которой держится двигатель. Он зажат четырьмя крепежными болтами и небольшим прикладом со сквозными отверстиями. Я использовал Autodesk Inventor для создания детали (которая включена в файлы для загрузки).
Эта конструкция состоит из двух частей: основной L-образной части, которая соединяет привод руля с двигателем, а другая прижимает двигатель к основанию с помощью четырех болтов 10-32.Я смог использовать CAM в Fusion 360 и станок с ЧПУ, чтобы сделать основную деталь, с дополнительным ручным фрезерованием и нарезанием резьбы для чистовой обработки.
Наконец, я использовал ручную фрезу, чтобы вырезать базовый зажим и добавил сквозные отверстия для болтов. На рисунках 3-6 показана CAD-модель колеса в сборе в дополнение к процессу сборки колеса. В основании скутера есть две направляющие, которые выдерживают вес райдера, которые я также использовал для надежного удержания двух литий-полимерных батарей. Поскольку LiPo батареи очень нестабильны и подвержены как повреждению водой, так и проколам, я добавил металлическую крышку, чтобы защитить батареи от каждого из этих факторов.
Поскольку LiPo батареи очень нестабильны и подвержены как повреждению водой, так и проколам, я добавил металлическую крышку, чтобы защитить батареи от каждого из этих факторов.
РИСУНОК 3. САПР колесной сборки с ЧПУ.
РИСУНОК 4. Завершенный узел колеса с ЧПУ с прикрепленным шестигранником.
РИСУНОК 5. Крепление двигателя крупным планом.
РИСУНОК 6. Окончательная сборка переднего колеса.
Для этого я вырезал кусок алюминия толщиной 1/16 дюйма и согнул эти части до нужной длины, используя металлический гибочный станок и ацетиленовую горелку, чтобы уменьшить нагрузку на металл при гибке. При нормальном использовании дно, вероятно, будет поцарапано (см. , рис. 7, ), но металлическая крышка пока принимает на себя все повреждения без проблем.
РИСУНОК 7. Крупный план металлической рамы, защищающей батареи.
Я широко использовал 3D-печать как на стадии прототипа, так и в конечном продукте.Самая очевидная часть – это электрическая коробка, с помощью которой пользователь может легко заряжать LiPo батареи. В этом блоке есть главный выключатель питания, делитель напряжения для Arduino для считывания напряжения батареи (поскольку максимальный аналоговый вход составляет 5 В, а контроллер работает от литий-полимерного аккумулятора 12 В) и разъемы для зарядки LiPo.
Чтобы зарядить самокат, пользователь снимает переднюю панель (удерживается винтами M3), отсоединяет разъемы XT-60 от источника питания и просто вставляет их в зарядное устройство LiPo. Кроме того, для этого скутера разработан и напечатан на 3D-принтере корпус ЖК-экрана, корпус Arduino Nano, механизм складывания и водонепроницаемые детали.Все файлы САПР включены в загружаемые файлы для использования в вашем самокате.
На рисунке 8 показаны электрическая коробка и контроллер, подключенные к раме самоката. Чтобы прикрепить контроллер, я просверлил и проделал два отверстия в раме и прикрутил контроллер двумя болтами 10-32. Электрическая коробка соединялась одним болтом и стяжкой.
Чтобы прикрепить контроллер, я просверлил и проделал два отверстия в раме и прикрутил контроллер двумя болтами 10-32. Электрическая коробка соединялась одним болтом и стяжкой.
РИСУНОК 8. CAD рамы самоката с контроллером и электрической коробкой.
Этот метод крепления работает очень хорошо, обе коробки надежно закреплены.Я не хотел слишком сильно уменьшать силу самоката, поэтому я выбрал как можно меньше отверстий в самокате.
Позже, в процессе сборки, я заметил, что езда на самокате может быть очень неудобной, поскольку обе мои ноги не могут удобно поместиться на маленькой платформе. Вероятно, это связано с тем, что инженеры разработали самокат так, чтобы одна нога пользователя стояла на раме, а другая толкала самокат вперед. Чтобы исправить это, я знал, что у меня есть два варианта: добавить металлическую пластину сверху или отрезать основную раму и приварить новую.
К сожалению, у меня не было доступа к сварочному аппарату, поэтому пришлось использовать первый вариант. Мне удалось найти алюминиевую пластину в четверть дюйма, которая была достаточно большой, чтобы покрыть платформу. Я использовал ленточную пилу и шлифовальный станок, чтобы отрезать лист до нужной длины, в дополнение к добавлению паза для механизма складывания, как показано на Рис. 9 .
Мне удалось найти алюминиевую пластину в четверть дюйма, которая была достаточно большой, чтобы покрыть платформу. Я использовал ленточную пилу и шлифовальный станок, чтобы отрезать лист до нужной длины, в дополнение к добавлению паза для механизма складывания, как показано на Рис. 9 .
РИСУНОК 9. Самокат с дополнительной стоячей платформой.
Последней крупной модификацией этого самоката стал руль.Руль, поставляемый с самокатом, был так близко расположен, что им было очень трудно управлять, особенно на высокой скорости. Чтобы исправить это, я купил алюминиевую ложу диаметром один дюйм и с помощью токарного станка уменьшил диаметр до тех пор, пока он не вошел в раму.
Наконец, я просверлил и нарезал резьбой два отверстия для крепежных винтов 10-32, чтобы новая планка крепилась к исходной раме. С более длинным рулем на скутере было намного удобнее ездить и он чувствовал себя более устойчивым на поворотах.
Одной из ключевых тем, что я придерживался во всех моих разработанных компонентах, было обеспечение водонепроницаемости всей системы. Хотя было бы неразумно ездить на нем в сильный дождь, вся основная электроника должна быть водонепроницаемой. Основная проблема с водой – это батареи, расположенные под самокатом.
Хотя было бы неразумно ездить на нем в сильный дождь, вся основная электроника должна быть водонепроницаемой. Основная проблема с водой – это батареи, расположенные под самокатом.
Чтобы закрыть батареи, как упоминалось ранее, я согнул алюминиевый лист для защиты ходовой части, а также детали, напечатанные на 3D-принтере, с прорезями для защиты проводов кабельных сальников, чтобы провода могли проходить сквозь них.Есть три разных слота для прокладки кабелей, как показано на Рис. 10 : основной источник питания; LiPo управление аккумулятором; и датчики температуры аккумуляторной батареи. Эти прорези были снабжены нейлоновыми кабельными сальниками, которые водонепроницаемы и очень просты в использовании.
РИСУНОК 10. Фотография укомплектованной ходовой части скутера.
Наконец, я использовал Dynaflex 230 для полной водонепроницаемости батарей, что можно увидеть по краям на Рис. 10 .Затем эти провода проходят к главной электрической коробке, в которой используются те же кабельные сальники, что и в электрической коробке, и герметизируются с помощью термоусадочных трубок. Наконец, каждое проводное соединение имеет больше кремния на каждом стыке, чтобы гарантировать отсутствие утечек.
Наконец, каждое проводное соединение имеет больше кремния на каждом стыке, чтобы гарантировать отсутствие утечек.
Электрические компоненты
Как только я выбрал колесо ховерборда в качестве двигателя, я остановился на контроллере , рис. 11, , потому что он работал с моим бесщеточным двигателем и был очень недорогим. Батареи подобрать было немного сложнее.
РИСУНОК 11. Крупный план контроллера, установленного на самокат.
Поскольку почти все скутеры и мотоциклы используют литий-ионные аккумуляторы, я подумал, что они будут для меня лучшим вариантом. Причина, по которой они так широко используются, заключается в их превосходной емкости хранения, зарядных характеристиках, и они могут быть разработаны для соответствия практически любому форм-фактору.
Хотя я провел значительное исследование конструкции рюкзака для своего скутера, я понял, что у меня нет средств на покупку сварочного аппарата, который используется при изготовлении этих рюкзаков. В будущем мне было бы интересно создать еще один скутер или аналогичный проект, в котором я буду использовать батареи 18650 вместо стандартных LiPo-аккумуляторов, используемых в этой сборке.
В будущем мне было бы интересно создать еще один скутер или аналогичный проект, в котором я буду использовать батареи 18650 вместо стандартных LiPo-аккумуляторов, используемых в этой сборке.
Чтобы найти допустимые размеры для моих батарей, я провел несколько измерений с помощью штангенциркуля и сделал очень элементарную модель с помощью Autodesk Inventor, как показано на рис. 12 . Обладая этими размерами, я смог выбрать батареи, которые поместятся под основную раму скутера.
РИСУНОК 12. Простая САПР самоката с аккумулятором (оранжевого цвета).
У меня было 43 мм для работы по ширине батарей, и немного больше места, чтобы батареи могли поместиться под ними, не касаясь земли. Выбранные батареи были 6S и имели время автономной работы 4000 мАч, что немного меньше, чем я ожидал.
В целом, основная электрическая схема этого скутера была довольно простой в разработке. Как показано на Рис. 13 , у меня последовательно соединены две LiPo батареи, которые питают контроллер и двигатель.Контроллер считывает показания потенциометра дроссельной заслонки, установленного на руле, для установки скорости двигателя. Кроме того, я добавил кнопку круиз-контроля, также установленную на руле рядом с тормозом. Двигатель управляется трехфазным питанием с помощью трех датчиков Холла, которые все выводят на контроллер.
РИСУНОК 13. Схема силового привода скутера .
Теперь, когда у меня была основная конструкция самоката, мне показалось, что его очень легко подключить и кататься.К сожалению, этого не произошло. Подключить батареи и датчики температуры оказалось на удивление трудным, чтобы уместить их в отведенное мне пространство.
На этом этапе процесса сборки я завершил проектирование ходовой части и электрической коробки, которая была установлена, как вы можете видеть в окончательном дизайне еще на Рис. 1 . Я начал с того, что в дополнение к кабелям для зарядки LiPo (всего 26 кабелей) через сальники в основании разместил датчики температуры с лишними кабелями.
Наконец, я взял два своих разъема XT-60 и проложил кабели до блока управления. Эту процедуру подключения можно увидеть на , рис. 14, , где показана начальная прокладка кабеля в аккумуляторную секцию.
РИСУНОК 14. Подключение батарей к основанию рамы.
Затем я поместил литий-полимерные батареи в раму, которая плотно прилегает к корпусу, и начал подключать разные разъемы. После значительных проблем с установкой батарей и разъемов в отведенную комнату я понял, что мне нужно что-то изменить, чтобы все соответствовало, не оказывая значительного давления на кабели.
Я заметил, что разъемы XT-60 занимают много места, поэтому решил удалить их и оставить прямые паяные соединения. Я бы не рекомендовал снимать разъемы, но их было легче снять, чем переделывать корпус.
Я снимал каждый из разъемов по одному кабелю за раз, очень осторожно, чтобы не было короткого замыкания. Я использовал большие термоусадочные трубки и изоленту, чтобы убедиться, что они хорошо изолированы. Как видно на Рис. 15 , вся проводка на основании была сделана и приклеена лентой к термоусадочной трубке.
РИСУНОК 15. Окончательный аккумулятор перед упаковкой в термоусадочную пленку.
Затем я поместил заклеенную лентой систему в термоусадочную трубку и медленно сжал всю систему до тех пор, пока она не стала похожей на Рис. 16 . После этого я в последний раз поместил металлический лист и затянул все болты с помощью Loctite, чтобы сделать их прочными.
РИСУНОК 16. Блоки термоусадочных батарей.
Как кратко обсуждалось ранее, я разработал электрическую коробку, которая находится рядом с контроллером мотора.Схема этого простого блока показана на Рис. 17 .
РИСУНОК 17. Схема электрического блока.
Чтобы зарядить каждую из батарей, я просто снимаю штекерные разъемы с блока управления и подключаю их к балансировочному зарядному устройству вместе с соответствующими балансировочными кабелями. Как упоминалось ранее, я хотел бы использовать литий-ионный аккумулятор, который сделал бы процесс зарядки намного проще и плавнее. Поскольку у меня было только одно зарядное устройство, мне приходилось заряжать каждую батарею отдельно.
При использовании самоката я вставляю разъемы батареи в разъемы-розетки, которые соединяют батареи последовательно. В моем первом дизайне у меня был стандартный кулисный переключатель, рассчитанный на 10 А при 125 В переменного тока, что было значительно ниже, чем моя потребляемая мощность (около 250 Вт против 125 Вт). Эти переключатели на самом деле предназначены только для переключения переменного тока, что намного проще сделать.
К сожалению, за несколько дней использования переключатель полностью перегорел. После долгих исследований я обнаружил, что любой переключатель постоянного тока будет слишком большим, чтобы поместиться внутри или рядом с блоком управления.Вместо этого я выбрал импровизированный переключатель с закороченным гнездовым разъемом XT-60, который использовался для короткого замыкания или размыкания цепи. Хотя это, конечно, не самый простой вариант переключения, он очень функциональный и пока не вызывает никаких проблем.
Оттуда я подключил контроллер к электрической коробке и двигателю, оставив достаточную слабину для вращения колеса. На этом движение самоката было завершено. Пришло время разработать ЖК-экран и сопутствующие датчики. Функциональность, которую я искал от своего ЖК-экрана, заключалась в том, чтобы отображать напряжение батареи, приблизительный процент оставшегося заряда батареи, скорость и пройденное расстояние.Самым сложным из них было заставить правильно работать измерение скорости.
Для этого я подумал о том, чтобы использовать датчики Холла, используемые контроллером, но я беспокоился, что это может помешать основному управлению. Вместо этого я решил использовать показания датчика Холла, когда неодимовый магнит, подключенный к колесу, проходит мимо датчика. Одна из проблем этой конструкции заключается в том, насколько близко открытая электроника находится к колесу, из которого может разбрызгиваться вода.
Я разработал простую форму, в которую поместил электронику и эпоксидную смолу под названием Dragon Skin 20, как показано на Рис. 18 .
РИСУНОК 18. Водонепроницаемый датчик Холла.
Я оставил эпоксидную смолу на модуле синим цветом, что позволяет мне настроить чувствительность датчика. Рис. 19 показывает корпус экрана, предназначенный для размещения ЖК-экрана 20×4 символов и крепления к рулю с помощью винтов.
РИСУНОК 19. CAD модель корпуса ЖК-экрана.
Кроме того, я построил простую коробку для хранения Arduino Nano и соответствующей проводки (, рис. 20, ).Как в корпусе корпуса, так и в корпусе экрана используется стандартное оборудование M3, в том числе тепловые вставки, которые вплавляются в детали с помощью паяльника.
РИСУНОК 20. CAD небольшого электрического блока для Arduino Nano.
Наконец, я припаял все разъемы к Nano и поместил микроконтроллер на небольшую макетную плату. Затем я добавил женские разъемы вокруг Arduino с шестью разъемами питания и шестью заземлениями сбоку. На рис. 21 показан прототип коробки, подключаемой для тестирования.
РИСУНОК 21. Прототип блока Arduino Nano.
Я использовал обжимные соединения, чтобы прикрепить каждое устройство к макетной плате, на случай, если в будущем возникнут какие-либо проблемы с проводкой. Чтобы измерить напряжение батареи, я добавил делитель напряжения в электрическую коробку с резисторами 47 кОм и 4,7 кОм, включенными последовательно с Arduino, подключенным к резистору 4,7 кОм. Назначение делителя связано с тем, что Arduino работает с напряжением 5 В и, таким образом, может измерять максимум 5 В.Схема делит напряжение батареи почти ровно на 10, что делает его читаемым для Arduino. Схема Nano показана на Рис. 22 .
РИСУНОК 22. Общая схема Arduino, датчиков и ЖК-экрана.
Программирование
Код для Arduino включен в загрузку. Я объясню методы, которые я использовал при программировании этой системы. Самой сложной частью этой программы было заставить одометр датчика Холла и спидометр работать правильно с ограниченной тактовой частотой.Чтобы считывать показания датчика Холла, я подключил выход ко второму цифровому выводу, который может обрабатывать аппаратные прерывания.
При каждом нарастающем фронте сигнала датчика Холла запускается прерывание и выполняется простая функция, показанная на , рис. 23, .
РИСУНОК 23. Функция увеличения аппаратного прерывания.
Эта функция увеличивает счетчик, который хранится в электрически стираемой программируемой постоянной памяти (EEPROM).EEPROM – это энергонезависимая память, что означает, что она стабильна, когда на устройство не подается питание. Доступ к этой памяти не так прост, как определение переменной в памяти; вам нужно отправить байт данных на определенный адрес памяти. К сожалению, поскольку Arduino использует восьмибитную архитектуру, система не сможет сохранить показания одометра в одном адресе памяти. Чтобы решить эту проблему, я создал несколько базовых вспомогательных функций, которые записывают и читают «длинную» переменную по четырем восьмиразрядным адресам памяти, как показано на , рис. 24, .
РИСУНОК 24. Вспомогательная функция для записи в EEPROM.
Чтобы прочитать значение из памяти, я использовал оператор битового сдвига после чтения четырех байтов из памяти, как показано на Рис. 25 .
РИСУНОК 25. Метод побитового преобразования 4x восьмибитовых int в переменную типа long.
Часть этой программы, посвященная спидометру, запускается на TimerOne , который представляет собой 16-битный таймер, работающий на частоте 16 МГц.Я установил период таймера для запуска события каждую четверть секунды, чтобы прочитать одометр, сравнить его с предыдущим показанием, а затем вычислить скорость.
Программа вычисляет скорость, преобразуя изменение оборотов в расстояние. Я сделал массив из четырех последних скоростей и вывел среднее значение, чтобы сгладить данные для ЖК-экрана.
Датчики температуры очень легко настроить с помощью таблицы данных и базового аналогового считывания , как показано на Рис. 26 .
РИСУНОК 26. Считывание температуры батареи.
Кроме того, я считываю напряжение батареи очень похожим методом, но умножаю на 10 из-за схемы делителя напряжения. См. Рисунок 27 .
РИСУНОК 27. Показание напряжения LiPo .
Окончательная установка заключалась в объединении всего этого в одну программу и интеграции с ЖК-дисплеем.
Использование этого ЖК-экрана чрезвычайно просто благодаря прилагаемым библиотекам.Мне пришлось провести несколько тестов на ЖК-дисплее, чтобы убедиться, что расстояние между пробегом, скоростью, температурой и напряжением не перекрывается и хорошо выглядит, как показано на , рис. 28, .
РИСУНОК 28. Рабочий ЖК-экран.
Заключение
В целом, этот проект был очень познавательным. Было интересно спроектировать весь блок, от механических компонентов до используемого аппаратного и программного обеспечения. Конечный продукт обладает удивительной мощностью; он может переместить меня с рюкзаком на любой холм, который может предложить Итака, штат Нью-Йорк.Я был доволен и впечатлен мощностью ступичного двигателя.
Кроме того, ЖК-экран очень отзывчив и точен при измерениях скорости и одометра. Хотя мне не удалось проверить запас хода на ровной дороге, по моим оценкам, он составляет около 6-8 миль без подзарядки на основе предыдущих поездок. Это меньше, чем у многих скутеров на рынке, но я работал с очень ограниченным пространством под самокатом и батареями LiPo.
Я бы порекомендовал построить что-то подобное всем, кто может потратить время.Я регистрировал большую часть времени, когда работал над этим, и общее время составило около 100 часов!
В идеальном мире я бы приварил новую раму к существующему самокату. Это дало бы мне дополнительное место, чтобы с комфортом стоять, и поместило бы всю электронику в большее пространство.
В будущем я хотел бы немного поэкспериментировать с созданием литий-ионного аккумулятора для питания скутера. Мне понравилось работать над этим проектом, и я многому научился. Надеюсь, я вдохновил некоторых из вас на создание собственного! NV
Список деталей
Я купил запчасти в разных местах.
Amazon:
Стандартные детали со склада в Китае:
- Датчик Холла
- Ардуино Нано
- Проводка 12 калибра
eBay:
- Потенциометр дроссельной заслонки
- Восьмидюймовый бесщеточный мотор-концентратор для ховерборда
Из Community Maker Space в Корнелле:
- Все остальные детали
- Датчик температуры
- Электропроводка
- Пайка
- Расходные материалы для 3D-печати
Загрузки
Что в молнии?
Код и файлы САПР
Мой эксперимент с электросамокатом своими руками
Все о моем электрическом самокате «сделай сам» – испытании концепции с использованием мебельной тележки в качестве испытательного стенда.
Этот эксперимент больше касается механики, связанной с созданием одинарного управляемого привода.
Давайте будем щедры и скажем, что это ранние стадии разработки, начиная с нулевого бюджета.
Меня всегда интересовало что-нибудь с колесами.
Однажды мне посчастливилось спасти два электросамоката из места, известного в местном масштабе как перегрузочная станция, также известная как свалка для мусора. Мое любимое место для покупок. Как говорится, мусор для одного – золото для другого.
Увы, местные власти не разделяют моего энтузиазма и усложнили поход за покупками.
Излишне говорить, что оба электросамоката не подлежали ремонту, поэтому я спас моторы и колеса. Оставшиеся части были возвращены без возврата.
Оба двигателя – 24 В постоянного тока, номинальная мощность 200 кВт, со скоростью 2500 об / мин и 2750 об / мин. «Немного быстро», – подумал я, но потом понял, что это не скорость загрузки. Согласно моим исследованиям, эти электродвигатели способны развивать скорость до 15 км / ч для человека, который весит не более 70 кг.
Дело в том, что я вешу немного больше, так почему бы не использовать два двигателя вместо одного? Дело в том, что эта конструкция представляет собой автономный привод, и я мог бы сделать два, так что теоретически это удвоило бы грузоподъемность. Возможно, об этом позже.
Моя первая попытка сделать самокат не увенчалась успехом, поэтому проект на какое-то время был отложен.
Яркая идея
Несколько месяцев спустя, ища новый проект, я понял, что у меня действительно есть все ингредиенты, необходимые для изготовления самоката.
Я всегда мог купить комплект колес в большом зеленом сарае, но зачем мне это делать, когда у меня есть доступ не к одной, а к двум парам колес от двух мебельных тележек, которые у меня есть.
На фото показан привод, установленный на мебельной тележке. Я также использовал переднюю рулевую вилку от сломанного электросамоката, которая спрятана под всеми деревянными деталями.
Все, что есть на колесах, – это честная игра, и всегда планировалось одолжить колеса у мебельной тележки.Почему бы не использовать всю мебельную тележку? Если он лежит, он уже выглядит как скутер, и все, что мне нужно сделать, это установить третье колесо спереди.
Работало, но цепь соскальзывала под напряжением. Причина, по которой я подумал, заключалась в том, что натяжение под действием мощности вырывало звездочку из выравнивания.
Итак, мы вернулись к чертежной доске.
DIY Электросамокат Mk2
Здесь я установил электродвигатель на петлю и использовал эластичный шнур, чтобы поддерживать постоянное натяжение цепи.Электродвигатель установлен на шарнирной платформе так, чтобы под действием мощности он не вырывал звездочки из соосности. Во всяком случае, это моя теория, и, похоже, она работает.
Также сделали другой вид рулевого управления, проверенный и надежный трос на перекладине, который также служит подставкой для ног.
Я сделал Sketchup модель самодельного электросамоката Mk1.
Подробнее Самодельные электросамокаты своими руками Пошаговая инструкция по сборке самоката из подержанного самоката.Планирует построить самокат DIY из багги, созданных для развлечения.
Вернуться к проектам по деревообработке.
Стоит ли строить электросамокат? | by Gardiner Allen
В последнее время я был очарован современным электросамокатом. Думаю, это сочетание низкой стоимости и простого форм-фактора двух колес. Я ездил на нескольких арендованных скутерах в южной Калифорнии и наслаждался поездками. Это привело к проведению исследований и изучению их. Какие бывают самокаты? Как они работают? Вы можете их построить? Это привело к дальнейшим исследованиям и разгулам YouTube.Именно в этот момент я понял, что действительно хочу построить свой самокат с нуля. Это связано с моим давним желанием научиться правильно сваривать, сваривая сталь только один или два раза сварочным аппаратом.
Песок и соль, вероятно, действительно вредны для электросамокатов.Есть множество вдохновляющих видеороликов со всего мира, где люди делают индивидуальные самокаты. Они варьируются от низкотехнологичных и функциональных до этих (которые не являются скутерами, но используют ту же основную технологию):
Колин Фурз делает дрифт-трайк с приводом от LiPoly двигателя постоянного тока. разные цены, характеристики и уровни мощности: 399 долларов Xiaomi Mi (M365)
298 долларов Gotrax GXL
499 долларов Glion Dolly
117 долларов США Razor Power Core E90
278 долларов США Swagtron Swagger
169 долларов США Razor E100
долларов США 429 долларов США Razor
EcoSmart 499 долларов США Mercane Widewheel
799 $ Ninebot от Segway ES4
$ 1,100 Green Bike Electric Motion X1
Некоторые из них стоят ОЧЕНЬ ДЕНЕГ! В этот момент я подумал, что обязательно должен создать свою собственную.Мой вариант использования заключался в том, чтобы ездить со стоянки в офисное здание дважды в день, что соответствует расстоянию поездки около одной мили. В этом районе есть несколько прокатных скутеров, которые у меня есть шанс один из десяти найти в любой день. Стоимость двух поездок на арендованном самокате в день (до офиса и обратно) в среднем составляет около 4 долларов. Если бы мне приходилось платить за аренду скутера каждый день, по приблизительным подсчетам, я бы заработал 500 долларов примерно за 125 дней. Я чувствовал, что это достаточное оправдание для покупки скутера.Я также понимаю, что это недалеко: для меня экономия времени и возможность быстро добраться домой – самый важный фактор при использовании самоката. Мне нужен был автомобиль со следующими требованиями:
- Портативный : Должен быть в состоянии быстро и легко разбираться. Удобно помещается в багажник автомобиля седан и хорошо прячется в офисе (например, под столом) во время зарядки.
- Надежный : Должны хорошо работать при температуре ниже нуля, в жаркую погоду, под дождем и т. Д. Электроника и аккумулятор должны быть надежными, качественными и не выходить из строя.
- Stable : Обеспечивает безопасную езду по бездорожью независимо от комфорта. Включает такие вещи, как поверхность палубы, сцепление шины и т. Д.
- Модифицируемый : Легко разбирается и собирается для модификации или обслуживания.
- Скорее надежно : Трудно украсть. В случае кражи можно отслеживать через GPS.
Теперь, когда у меня был список, мне нужно было понять, как работает самокат. Современные электрические скутеры и велосипеды построены из следующих технологий и деталей:
- Литий-ионно-полимерный (LiPo) аккумулятор
- Электронный регулятор скорости (ESC)
- Бесщеточный двигатель (и) постоянного тока
- Контроллер дроссельной заслонки своего рода
- Дисковые тормоза и тормозная рукоятка
- Послепродажное обслуживание.Это все: от бескамерных шин, крючков, страховочных тросов, приборных панелей и т. Д.
Одно из лучших видео, которое я смотрел, читая о компонентах, было о том, как работает бесщеточный двигатель. Я думал, что знаю теорию, но это видео действительно помогло мне ее понять. Видео невероятно качественно подготовлено и даже рассказывает вам, как использовать ESC с Arduino!
Взяв за образец очень популярный самокат Xiaomi Mijia M365 (это самый продаваемый самокат в Китае), я поискал в Google eBay и другие сайты, такие как AliExpress и Banggood, чтобы посмотреть, сколько могут стоить сырые компоненты для сравнения.
Батарейный блок
Чтобы создать свой собственный клон батарейного блока 36V 280WH 7,8Ah, мне нужно было бы купить элементы, такие как популярный Panasonic 18650B, использовать сварочный аппарат DIY, чтобы соединить батареи вместе, подключить BMS к каждой ячейке и оберните все это проводами и разъемами. Покупка нового пакета стоит около 70 долларов США.
Мотор
Если у вас нет механической мастерской, вам нужно купить комбо мотор-колесо. Бесщеточный колесный двигатель 36V 250W имеет пиковую мощность 500W, максимальную скорость 40 км / ч (25 миль в час) с максимальным крутящим моментом 16Nm.Покупка нового стоит 135 долларов.
ESC
M365 имеет комбинированную материнскую плату и ESC. Стоимость M365 составляет 45 долларов США. В качестве альтернативы вы можете купить дроссельную заслонку на 36 В (с регулятором скорости!) За 35 долларов США
Рама
У меня нигде не было скутера для взрослых, поэтому мне нужно было купить новый или посмотреть на Craigslist. Складные большие самокаты стоят от 50 до 160 долларов.
Другие детали и аксессуары
- Колесо с тормозным диском 35 долларов США
- Разные велосипедные кабели
- Велосипедная тормозная ручка
- Разные переключатели, термоусадочная пленка, разъемы и т. Д.
Простая покупка вышеуказанных деталей для привода двигателя на раме скутера без каких-либо приятных вещей уже стоит выше 375 долларов без доставки. Это не включает время, необходимое для изготовления, монтажа, пайки и сборки функционального самоката в соответствии с моими вышеуказанными требованиями. Это было не то, чего я ожидал! Если бы у меня был доступ к большему количеству запчастей, я чувствовал себя комфортно и имел инструменты для изготовления и сварки алюминия, я бы подумал, что это повлечет за собой веселье. В будущем я все еще хотел бы построить скутер или, возможно, Ezroller с электрическим приводом.
Поскольку Walmart продает Xiaomi M365 за 399 долларов, это кажется хорошей сделкой. Я только что купил один и узнаю, стоило ли оно того. Так как это Walmart, я всегда могу его вернуть!
Самодельный электросамокат – Марка:
Энергия и устойчивость ТехнологияЛ.W. прислал несколько фотографий и информацию о своем собранном вместе электросамокате – «Вот несколько снимков хитрого устройства, которое я смонтировал из внедорожной версии KickBike, плюс электрическое колесо« go-hub ». Я использовал старую подножку от давно умершего электросамоката. Все, что для этого потребовалось, это немного согнуть вручную и просверлить новые отверстия, чтобы она подошла вместо слишком узкой подножки приклада. Кроме того, мне пришлось снять дисковый тормоз с KickBike и заменить его тормозными суппортами с моего MT.велосипед. (Кроме того, мне пришлось сделать переднюю сумку более устойчивой, чем показано на рисунке, но для этого не требовалось фото, а подножка показала себя мертвой массой, поэтому я ее снял.) Она едет очень тихо (без цепи), и гораздо легче, чем мои предыдущие электросамокаты, передвигаться пешком, когда мне нужно.
На последнем снимке показано, как я укрепил стойку Topeak, чтобы она оставалась стабильной, пока она была заполнена 3 тяжелыми свинцово-кислотными батареями. Рама немного шаталась под весом батареи – в конце концов, рама-труба всего одна – но дополнительное усиление стойки помогло смягчить колебания.Эта опора изнашивалась примерно через 1500 миль, поэтому я сделал альтернативное усиление самой стойки, установил ее выше и заменил 36V свинцово-кислотных на 48 NiMH – намного быстрее; меньший вес. Тем не менее, он немного выше, поэтому все еще немного шаткий, но достаточно стабильный для 14 миль, которые я еду в каждую сторону (около 1 часа с перекрестками и светофорами на 4 мили в городе). Это требует подзарядки после каждой поездки, поэтому я ношу зарядные устройства в передней сумке ».
Связанный:
EV Список обсуждений – Ссылка.
Cheap Diy Electric Scooter Kit, найдите Diy Electric Scooter Kit предложения на сайте Alibaba.com
250W 350W Электродвигатель + контроллер + Twist Throttle Electric Bike Brush DC Motor Electric Scooter Motor kit Easy DIY Ebike
US $ 101.57 – 148,8 / шт.
ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД, 36 В, 450 Вт, ЩЕТОЧНЫЙ ДВИГАТЕЛЬ + ДРОССЕЛЬНАЯ ЗАСЛОНКА + ДВИГАТЕЛЬ 450 Вт, ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД, 450 Вт Для самоката DIY Electric Trikke скорость может составлять 30 км / ч
152,99
36V 350W Комплект для преобразования электрического скутера 8-дюймовый бесщеточный мотор Huv Комплект для самоката Kick DIY Electric Trikke Скорость может составлять 30 км / ч
169.99
24V36V 250W Комплект электродвигателя Unitemotor + Контроллер мотора + Электродвигатель дроссельной заслонки E-Bike Комплект мотора электрического велосипеда Мотор электрического скутера
319,67 долл. США / шт. Сменный набор
101,99
NADI SCOOTER 24V36V150W 8-дюймовый ЭЛЕКТРИЧЕСКИЙ СКУТЕР БЕСЩЕТЧАТЫЙ КОМПЛЕКТ МОТОРА С ЖК-ДИСПЛЕЕМ С ДРОССЕЛЬНОЙ ЗАСЛОНКОЙ DIY ELECTRIC SCOOTER TOWN 7 XL
179.99
24V36V 450W ЭЛЕКТРОДВИГАТЕЛЬ КОМПЛЕКТ ЭЛЕКТРИЧЕСКИЙ СКУТЕР BIKE MOTOR GNGEBIKE MOTOR KIT РЕДКОЗЕМЕЛЬНЫЙ ДВИГАТЕЛЬ MY1018 (с боковым креплением)
359,48 долл. США / шт.
US $ 150,77 – 208,8 / шт.
Комплект электрического бесщеточного двигателя постоянного тока мощностью 1800 Вт, электродвигатель среднего привода для электрического скутера, велосипеда, мотоцикла, высокоскоростной бесщеточный двигатель 48 В, набор для захвата скорости 32 А для скутера с электрической дроссельной заслонкой для электровелосипеда Go Karts
179.99
24V 250W Электровелосипед Мотор постоянного тока Электродвигатель для скутера Электрический велосипед Комплект для переоборудования Редукторный двигатель DIY Комплект для электровелосипеда
93,99
24V 250W Комплект для переоборудования электровелосипеда E-BIKE MOTOR KIT ELECTRIC SCOOTER BICYCLE MOTOR (БОКОВОЙ МОТОР)
215,8–234,19 долл. США / шт.
Надоело искать поставщиков? Попробуйте запрос предложений! | Запрос коммерческого предложения
Настройка обработки Apperal
|
24V36V 350W Электродвигатель Комплект для переоборудования электрического скутера DIY E-Bike ДОМАШНИЙ Электрический велосипед L-FASTER EBike Motor
73.99
Electric TOWN 7 Комплект для переоборудования самокатов Самый легкий электрический скутер Складной самокат с мотором модели самолета Самый легкий
159,99
Самодельный комплект электропривода самоката TOWN 9 Самодельный самокат с ременным приводом Самый легкий привод электрического скутера TOWN 9 EF
169,99350 Вт 8 ДЮЙМОВЫЙ ЭЛЕКТРИЧЕСКИЙ СКУТЕР БЕСЩЕТЧАТЫЙ МОТОРНЫЙ КОМПЛЕКТ МОТОРА С ЖК-ДИСПЛЕЕМ ДРОССЕЛЬНАЯ ЗАСЛОНКА DIY ЭЛЕКТРИЧЕСКИЙ СКУТЕР TOWN 7 XL
215.99
24V36V48V 500W Электродвигатель, щеточный двигатель постоянного тока, комплект Электрический мотороллерный двигатель MY1020 UNITE, комплект для переоборудования электрического скутера E-bike Motor Kit
109.99
-велосипедный моторный комплект самый дешевый
104,99
Комплект стоп-сигналов «Аксессуар для Super Turbo 800-Elite или Super Turbo 1000-Lithium Electric Scooter»
$ 28.00
MY1020 Комплект электрического бесщеточного двигателя постоянного тока мощностью 2500 Вт 60 В, контроллер бесщеточного двигателя 41A 18 Mosfet, дроссельная заслонка с поворотной рукояткой, комплект для переоборудования электрического скутера для электронного велосипеда DIY (комплект двигателя BLDC 60 В, 2500 Вт с ногой)
219,99
24V36V48V 500 Вт электродвигатель с щеткой Двигатель постоянного тока Электрический мотороллер MY1020 Комплект для преобразования электрического скутера Комплект мотора электронного велосипеда
null
SODIAL Новая замена для умного самобалансирующегося электрического самоката Внешняя оболочка DIY
10.18
Комплект усиления электрического самоката для велосипедов Gio 350 Вт и 500 Вт – Speed Booste
150,00 долл. США
TOOGOO (R) Новая замена для самоката Smart Self Balance DIY Outer Shell
10,38
24V36V 350W ELECTRIC BIC КОМПЛЕКТ ВЫСОКОСКОРОСТНОЙ ЭЛЕКТРИЧЕСКИЙ СКУТЕР DIY ДОМАШНИЙ ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД 24 В, 350 Вт, ЩЕТОЧНЫЙ ДВИГАТЕЛЬ
219,99
MY1020 Электрический бесщеточный двигатель постоянного тока мощностью 2500 Вт, 60 В, контроллер бесщеточного двигателя 41A 18 Mosfet, комплект для бесщеточного двигателя Twist Grip, дроссельная заслонка для электрического самоката )
null
Комплект шин и камер для электрического скутера Zappy 3 Pro Flex 16×2.125 2,80 / 2,5
68,89 долл. США
Аккумулятор BladeZ Elite 250, аккумулятор для электрического скутера City Mantis, аккумулятор для электрического скутера GT-GT-200, аккумулятор для электрического скутера GT-Mini-E, аккумулятор для электрического скутера i-Zip l-200, мангуст Аккумулятор для электрического скутера M-200, аккумулятор для электрического скутера Mongoose Micro-3, аккумулятор для электрического скутера Rad2Go Sunbird,
29,99
FidgetFidget 2 x HTD 384-3M-12 Запасной комплект ремня привода ГРМ для электрического самоката
8.21
Комплект для переоборудования электрического скутера L-быстрее для Town 9EF Индивидуальное моторное устройство для скутера Town 9 Самый легкий привод электрического скутера
149,99
Вас также может заинтересовать:
24V 350W DIY Электрический самокат с бескамерной шиной., Бензин Комплект для преобразования электрического скутера, комплект для преобразования электрического самоката, इलेक्ट्रिक स्कूटर कन्वर्शन किट – Mr Engineer, Vadodara
24V 350W DIY Электрический комплект для самоката с бескамерной шиной., Комплект для преобразования бензина в электрический самокат, Комплект для преобразования электрического скутера, इलेक्ट्रिक स्कूटर कन्वर्शन किट – г-н Инженер, Вадодара | ID: 22894760430Спецификация продукта
| Напряжение | 24 В / 36 В |
| Фаза | 3 |
| Марка | yf gold / unite |
| Скорость вращения | 907 Источник питанияDC |
| Тип упаковки | 3 слоя |
| Режим управления | Дроссельная заслонка|
| Обработка поверхности | порошковое покрытие |
| 907 907 907 9018 907 9018 350 Вт |
Описание продукта
Теперь с помощью этого набора вы легко сможете сделать самодельный электросамокат своими руками.грузоподъемность до 100 кг, скорость до 30 км / час.Дополнительная информация
| Срок поставки | 7 рабочих дней |
| Производственные мощности | 50 |
Заинтересовал этот товар? Получите последнюю цену у продавца
Связаться с продавцом
Видео о продукте
Изображение продукта
О компании
Год основания 2017
Юридический статус Фирмы Физическое лицо – Собственник
Характер бизнеса Производитель
Количество сотрудников До 10 человек
Годовой оборот R.50 лакх – 1 крор
Участник IndiaMART с марта 2017 г.
GST24JDRPS4666F1ZT
Основанная как Собственник фирма в год 2017, на Вадодара (Гуджарат, Индия), мы «Mr_Engineer» – ведущий производитель , оптовый продавец и трейдер широкого диапазона Electric Cycle , Комплект для переоборудования, Зарядное устройство, и т. Д. После тщательного анализа рынка мы закупаем эти продукты у известных и пользующихся наибольшим доверием поставщиков.Кроме того, мы предлагаем эти продукты по разумным ценам и доставляем их в обещанные сроки. Под заголовком «Mrs. Джерри Шах »(владелец), , мы приобрели огромную клиентуру по всей стране. Вернуться к началу 1 Есть потребность?
Получите лучшую цену
Есть потребность?
Получите лучшую цену