Сверлильный станок 2н135 технические характеристики
Вертикально-сверлильный станок 2Н135: характеристики, паспорт
Традиции выпуска качественного металлорежущего оборудования были заложены в СССР в послевоенный период. Очень часто конструкторам удавалось создать станки, которые длительный срок использовались производственниками. К ним можно отнести вертикально сверлильный станок 2Н135, технические характеристики которого долгое время были эталоном.
Вертикально-сверлильный станок 2Н135
Сверлильное оборудование
В станочном парке большой процент занимает сегмент сверлильных станков. Это объясняется необходимостью проводить сверление практически в любом технологическом процессе. Всю необходимую информацию, связанную с устройством агрегата содержит паспорт, поставляемый с любой моделью агрегата.
Все оборудование данного сегмента представляет собой три группы, каждая из которых выделяется в зависимости от специфики работы:
- специальные;
- специализированные;
- универсальные.


В каждой из этих групп можно провести градацию в зависимости от размеров сверла, и соответственно отверстий, которые под силу данному сверлильному станку. Выделим основные:
- легкие, до 12 мм;
- средние, 18-50 мм;
- тяжелые, свыше 50 мм.
Назначение, принцип действия, устройство станка 2Н135
Историческая справка
Вертикально-сверлильный станок модели 2Н135 негласно считается «рабочей лошадкой» всех механических участков машиностроительных производств. Устройство станка отличается максимальной простотой и надёжностью, а кинематическая схема действия коробки передач и коробки скоростей станка до сих пор не имеет себе равных.
Выпуск базовой модели 2135 начался в 1945 году на заводе города Стерлитамак. После этого, основываясь на данных эксплуатации, были проведены работы по модернизации. С 1965 года началось производство модели 2Н135.
Внешний вид станка 2Н135
Техническая характеристика сверлильного станка 2Н135
Расшифровка названия оборудования может быть произведена следующим образом. При расшифровке первая цифра условного обозначения указывает на группу металлорежущего оборудования – сверлильное, буква дальше свидетельствует о глубокой модернизации предшествовавших вариантов конструкции (исторически первым был вариант «А», вторым – «Б» и т.д.). Следующая после буквенного индекса цифра при расшифровке указывает на тип станка (1 – вертикальный), а две последних сообщают основные технические характеристики для всего сверлильного станочного парка – наибольшем диаметре просверливаемого отверстия в миллиметрах.
При расшифровке первая цифра условного обозначения указывает на группу металлорежущего оборудования – сверлильное, буква дальше свидетельствует о глубокой модернизации предшествовавших вариантов конструкции (исторически первым был вариант «А», вторым – «Б» и т.д.). Следующая после буквенного индекса цифра при расшифровке указывает на тип станка (1 – вертикальный), а две последних сообщают основные технические характеристики для всего сверлильного станочного парка – наибольшем диаметре просверливаемого отверстия в миллиметрах.
Материалом для эталонной заготовки принимается сталь марки Сталь 45 в обычном состоянии после прокатки. Поэтому для деталей, изготовленных из других материалов с большей или меньшей прочностью, приведенная выше кинематическая характеристика может изменяться соответственно в меньшую или большую сторону. В расшифровке могут встречаться также дополнительные цифры и буквы, указывающие на модификацию основной модели. Все данные в нашем случае находятся в паспорте вертикально сверлильного станка 2Н135.
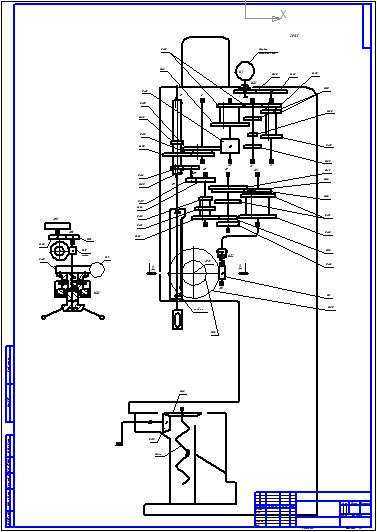
Конструкция вертикально сверлильного станка 2Н135 ясна из представленного рисунка. Изготовитель вправе вносить в модель некоторые дизайнерские, технические или иные изменения в конструкцию и чертёж, которые не должны ухудшать в станке 2Н135 технические возможности и габариты общего вида агрегата описываемой модели.
В комплект к поставляемому оборудованию обычно прилагается паспорт, инструкция по эксплуатации, также вкладывают кинематическую и электрическую схемы, ведомость и чертежи быстроизнашиваемых деталей. Ряд фирм производит и специальные исполнения – например, с поворотным столом, с ЧПУ, с коробкой пиноли под головку с несколькими шпинделями и пр. (обзор вариантов достаточно длинен).
Электрическая схема 2Н135
Основное назначение агрегата – выполнять разнообразные сверлильные и зенковочные операции, однако на 2Н135 можно также нарезать резьбу, резать торцы, производить развёртывание, вертикальную запрессовку и даже использовать специальный инструмент для фрикционной осадки изделий, прочностные характеристики которых не превышают значений для стали 45.
Вертикально сверлильный станок 2Н135 состоит из следующих механизмов:
- Электродвигателя.
- Коробки скоростей.
- Плунжерного насоса.
- Коробки подач, которая может функционировать как в ручном, так и в автоматическом режиме.
- Большой опорной вертикальной колонны.
- Инструментальной головки со шпинделем.
- Регулируемого по высоте стола.
- Основания.
- Системы управления агрегатом.
- Гидросистемы охлаждения.
- Электрическое оборудование.
Расположение составных частей сверлильного станка 2Н135
Принцип действия
Кинематика агрегата определяет возможности изменения числа оборотов для шпинделя. Конструктивные решения и габариты коробок скоростей и подач позволяют реализовать различную производительность операций, настройку которых определяет материал изделия, подвергаемого мехобработке, и отверстие в заготовке. Кроме того этот процесс зависит от габаритов детали.
Расшифровка и описание не вносят ясность в некоторые эксплуатационные и кинематические показатели, которыми располагает оборудование, поэтому далее приводится технические характеристики станка (касается только базового исполнения):
- Возможный вертикальный вылет станины, м – 0,3.
- Эксплуатационный рабочий габарит между шпинделем и столом, мм – 30…750.
- Шпиндель: число оборотов, мин-1 – 31.5…1400;
- Наибольшее количество скоростей в коробке скоростей – 12.
- Максимальный сверлильный ход коробки подач, мм – 250.
- Электрический двигатель: работа/номинальный крутящий момент, Нм – 400.
- Наибольшее усилие, развиваемое коробкой подач, Н – 15000.
- Размеры рабочего стола, мм — 500×450, способ фиксации заготовок – Т-образные пазы, возможность продольной регулировки стола ± 150 мм.
- Точность устройства ручного управления для коробок: подачи, мм ± 0,05, скоростей, мм ± 0,05…0,8 (ручной отсчёт – по лимбу).
- Мощность приводного двигателя, кВт – 4.
- Габарит, м – 2,535×0,835×1,030.
- Вес, кг – 1200.
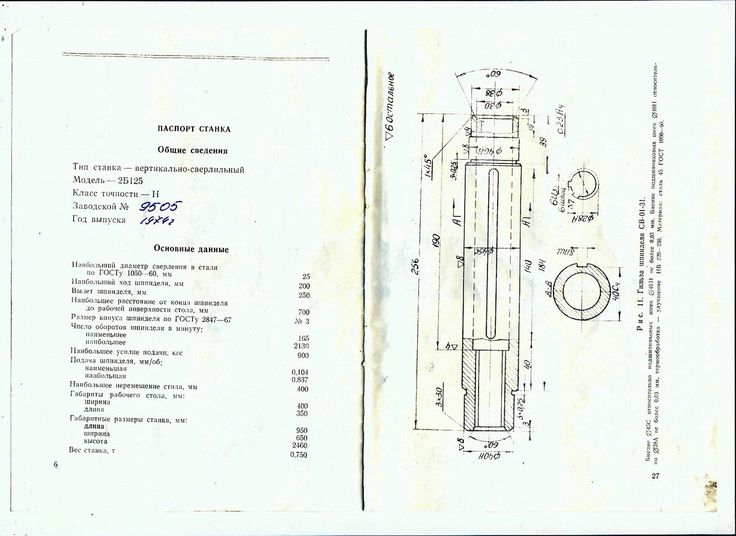
Полную информацию о любых станках можно почерпнуть из паспортов интересующих изделий. Паспорт содержит схему установки агрегата, и план фундамента под его основание. Габариты сверлильного станка 2Н135 говорят о том, что он может устанавливаться в небольших помещениях.
Скачать паспорт (инструкцию по эксплуатации) вертикально-сверлильного станка 2Н135
Эксплуатация механизма в рабочем режиме заключается в следующем. Деталь, подлежащую обработке, следует расположить и зафиксировать на координатном столе. Шпиндель с установленным сверлом (или иным инструментом согласно чертежу) при этом должен находиться в крайнем нижнем положении. Шпиндель можно зацентровать, используя устройство продольного перемещения стола.
Убедившись в соосности взаимного расположения шпинделя и торца заготовки и, выбрав подходящую скорость из кинематических возможностей в коробке скоростей, включают вертикальный двигатель главного привода. Когда кинематическая схема управления коробки подач настроена, осуществляют подачу инструментальной головки к торцу изделия, и производят необходимую технологическую операцию.
Особенности устройства
Основой всего агрегата выступает сверлильная головка. Это отливка, выполненная в форме коробки, в которой установлены основные узлы станка:
Это отливка, выполненная в форме коробки, в которой установлены основные узлы станка:
- шпиндель;
- механизм переключения;
- коробка скоростей;
- механизм подачи;
- коробка подач.
- Коробка подач станка 2Н135
- Коробка скоростей станка 2Н135
Головка расположена на опоре, и на нее установлен двигатель. Он посредством муфты и зубчатой передачи передает вращательный момент на коробку скоростей станка 2Н135. В ней имеются специальные блоки, способные изменять вращение режущего инструмента. Зубчатая пара на выходе, придает движение коробке подач, ее конструктивные особенности позволяют производить девять подач. В конечном итоге начинает работать механизм подачи.
Кинематическая схема станка 2Н135
На переднюю панель сверлильной головки вынесены все кнопки, отвечающие за управление электрической схемой станка 2Н135. При включении основного пускателя загорается лампочка, сигнализирующая, что электрический ток запитал цепи. Схема позволяет изменять направление вращения шпинделя, и производить динамическое торможение. Кроме того, ее устройство облегчает переключение скоростей.
Схема позволяет изменять направление вращения шпинделя, и производить динамическое торможение. Кроме того, ее устройство облегчает переключение скоростей.
От перегрузки защищают тепловые реле. Для устранения возможной опасности поражения оператора током электрическая схема агрегата предусматривает применение защитного заземления.
Нельзя начинать эксплуатацию механизма без детального изучения паспорта. Только так вы сможете избежать поломок и аварий.
Сверлильные работы на станке вертикально-универсального сверления одношпиндельного 2Н135
Ограничения скорости и подачи шпинделя позволяют обрабатывать различные виды отверстий по рациональным параметрам резки.
Имеется на станке механическая подача шпинделя, если циклы ручного управления.
способен обрабатывать детали в широком диапазоне размеров из различных материалов, используя инструмент из высокоуглеродистых и быстрорежущих сталей и твердых сплавов.
Станки
снабжены устройством реверсирования двигателя основного движения, которое позволяет им резьбонарезать машинные метчики для ручной подачи шпинделя.
Технические характеристики станка 2Н135
| Наименование параметра | 2Н135 |
|---|---|
| Основные технические характеристики | |
| диаметр сверления в стали 45, мм | 35 |
| Наименьшее и наибольшее расстояние от вершины шпинделя до стола, мм | 30 … 750 |
| Наименьшее и наибольшее расстояние от вершины шпинделя до пластины, мм | 700…1120 |
| Расстояние от вертикальной оси шпинделя до направляющей стойки (радиус) мм | 300 |
| Письменный стол | |
| Максимальная нагрузка на стол (в центре), кг | |
| Размеры рабочей поверхности стола, мм | 450 x 500 |
| Номер Т-образный слот Размер Т-слот | 3 |
| максимальное вертикальное перемещение стола (ось Z), мм | 300 |
| перемещение стола за один оборот ручки, мм | |
| шпиндель | |
| максимальное смещение (установка) шпиндельной головки, мм | 170 |
| Максимальное смещение (ход) шпинделя, мм | 250 |
| Движение шпинделя на одно деление лимба, мм | 1,0 |
| Ход шпинделя на оборот маховика, мм | 122,46 |
| Частота вращения шпинделя, об / мин | 31,5. ..1400 ..1400 |
| Количество скоростей шпинделя | 12 |
| максимальный крутящий момент Нм | 400 |
| Конический шпиндель | Морзе 4 |
| Механика машины | |
| Количество ступеней рабочего питания | 9 |
| Ограничивает вертикальную рабочую подачу на оборот шпинделя, мм | 0,1… 1,6 |
| Циклы управления | Руководство |
| Максимальная мощность потока, кН | 15 |
| Динамический тормозной шпиндель | E |
| Драйв | |
| Электродвигатель главного привода, кВт | 4,0 |
| Электрический насос охлаждающей жидкости Тип | x 14-22M |
| Размер машины | |
| габариты станка, мм | 2535 x 825 x 1030 |
| Масса станка, кг | 1200 |
Отзывов о товаре пока нет. Вы можете оставить свое заполнение формы.
Вы можете оставить свое заполнение формы.
,
Stanko 2N135 Штанговый сверлильный станок
Этот сайт использует куки. Продолжая просматривать Exapro, вы соглашаетесь использовать куки на нашем сайте.
Меню
- Home
- Купить
- Электроника 108
- Машины для приготовления пищи 3448
- Металл – литейное производство / прессы 1497
- Металл – станки 10307
- Металл – листовой металл 4441
- Другое промышленное оборудование 2526
- Упаковка – кондиционирование 3881
- Фармацевтическая – Химическая 2169
- Пластик – резина 2648
- Печатные машины 3779
.Сверлильный станок
-спецификация-ID товара :: 60510530530-russian.alibaba.com
Спецификация сверлильного станка Z5025-1A
1. Может использоваться для сверления, бурения, раскатывания, растачивания, нарезания резьбы, точечной обработки, снятия фаски и т. Д.
Д.
2. Электрическая система соответствует стандартам IEC.
3. Рабочий стол может вращаться на 360 ‘или наклоняться + -45’ и легко управляться
4.Изменить скорость с помощью зубчатых передач и легко управлять
Спецификация:
| Модель | D2 | D3 | D4 | |
| Макс. диаметр сверления (сталь) | 25 мм (1 дюйм) | 25 мм (1 дюйм) | 25 мм (1 дюйм) | |
| Макс. ход шпинделя | 140 мм (5 1/2 дюйма) | 140 мм (5 1/2 дюйма) | 140 мм (5 1/2 дюйма) | |
| Конус отверстия шпинделя | Морзе3 | Морзе № 3 | Морзе № 3 | |
| Расстояние от центра шпинделя до поверхности вертикальной колонны | 225 мм (8 дюймов) | 225 мм (8 7/8 дюймов) | 315 мм ( 12 3/8 дюйма) | |
Макс. расстояние от вершины шпинделя до поверхности рабочего стола расстояние от вершины шпинделя до поверхности рабочего стола | 620 мм (24 1/2 дюйма) | 660 мм (26 дюймов) | ||
| 8 Диапазон скоростей шпинделя (8 шагов) | 50 Гц: 100 ~ 2900 об / мин, 60 Гц: 120 ~ 3480 об / мин | 50 Гц: 100 ~ 2900 об / мин 60 Гц: 120 ~ 3480 об / мин | 50 Гц: 100 ~ 2900 об / мин 60 Гц: 120 ~ 3480 об / мин | |
| Диапазон подачи шпинделя | 0.08,0.16,0.24мм / р | 0,08,0.16,0.24мм / р | ||
| Макс. расстояние от торца шпинделя до опорной плиты | 445 мм (16 дюйма) | 1075mm (42 5 / 16В) | 480мм (18 7/8 дюймов) | |
| Макс. расстояние от торца шпинделя до рабочей поверхности базовой пластины | 400мм | 400мм | ||
| Размеры эффективной рабочей зоны Worktable | 297 × 305 мм (11 × 12 дюймов) * 317 × 305мм (12 × 12 дюймов) | * 340 мм (13. 4 в) 4 в) | 315X415mm (12 3/8 х 16 3/8 дюйма) | |
| Размеры эффективной рабочей области опорной плиты | 297 × 305 мм (11 × 12 дюймов) * 317 × 305 мм (12 × 12 дюймов) | 305 × 297 мм (12 × 11 дюймов) * 317 × 305 мм (12 × 12 дюймов) | 475X400 мм | |
| Мощность двигателя | 0,75 / 0,55 кВт | 0,75 / 0,55 кВт | 0,75 / 0,55 кВт | |
| Габаритные размеры | 580 × 470 × 1000 мм (22 × 18 × 39 дюймов) * 590 × 545 × 1070 мм (23 × 21 × 42 дюймов) | 640 × 470 × 1670 мм (25 × 18 × 66 дюймов) * 650 × 545 × 1740 мм (25 × 21 × 68 дюймов) | 788X560X1820 мм (31X22X72 дюйма) * 788X560X1835 (31X22X72.25 дюймов) | |
| Размеры упаковки (Д × Ш × В) | 740 × 490 × 1070 мм (29 × 19 × 42 дюймов) * 750 × 550 × 1155 мм (29 × 21 × 45 дюймов) | 1780 × 510 × 880 мм (70 × 20 × 34 дюйма) * 1860 × 550 × 900 мм (73 × 21 × 35 дюймов) | 1900X590X1060 мм | |
| NW / GW | 170 кг / 200 кг * 232 кг / 270 кг | 243 кг / 299 кг * 270 кг / 350 кг | 404 кг / 504 кг * 430 кг / 540 кг | |
| * Трехфазный охлаждающий насос | Модель | AB12 | DB12 | DB-12 |
| Мощность | 0. 04 кВт 04 кВт | 0,04 кВт | 0,04 кВт | |
| Пропускная способность | 12 л / мин | 12 л / мин | 12 л / мин | |
| Технические характеристики | 380 В 50 Гц | 380 В 380 Гц 50 Гц / 22 В 60 Гц | 380 В 50 Гц / 22 В 60 Гц | |
| Стандартные принадлежности: | |
| 1) Сверлильный патрон с 3 кулачками 1-13 мм | |
| 2) Коническая втулка 3/2 | |
| 3) Коническая втулка 3/1 | |
| 4) Держатель сверлильного патрона | |
| 5) Клин для инструмента с коническим хвостовиком |
Упаковка и отгрузка
Наши услуги
Информация о компании
FAQ
,
Рис.
 Кинематическая схема вертикально-сверлильного станка модели 2Р135Ф2 отношение коробки
Кинематическая схема вертикально-сверлильного станка модели 2Р135Ф2 отношение коробкиАвтор Андрей Измаилов На чтение 6 мин. Просмотров 199 Опубликовано
Содержание
- Архив на станки
- Конструктивные особенности
- Принцип действия
- Устройство и особенности аппарата
Архив на станки
Станок универсальный горизонтально-расточной 2А614-1 предназначен для обработки корпусных деталей с точными отверстиями. связанными между собой точными межосевыми расстояниями.
Наибольшая масса обрабатываемых деталей 2000 кг.
Станок 2А614-1 в отличие от станка 2А615-1 оснащен встроенной планшайбой с радиальным суппортом.
Станки обладают большой универсальностью. На них можно производить сверление, растачивание, зенкерование и развертывание отверстий, фрезерование плоскостей и пазов, а также обтачивание торцов, растачивание отверстий и обработку кольцевых канавок радиальным суппортом планшайбы.
- Станок 2А614-1 по заказу потребителя может быть изготовлен с резьбонарезным устройством.
- Наличие механизированного зажима инструмента, жесткость, виброустойчивость, быстроходность и удобство управления станком позволяют вести на них точную производительную обработку с наименьшей затратой машинного и вспомогательного времени.
- Станки предназначены для работы в инструментальных и механических цехах.
Технические характеристики горизонтально-расточного станка 2А614-1
Технические характеристики станков это основной показатель пригодности станка к выполнению определенных работ на станках. Для горизонтально-расточных станков основными характеристиками является:
- Размер рабочей поверхности стола
- Диаметр выдвижного шпинделя
- Наибольшее продольное перемещение шпинделя
- Число оборотов шпинделя в минуту
Ниже приводится таблица с техническими характеристиками координатно-расточного станка 2А614-1. Более подробно технические характеристики станка можно посмотреть в паспорте станка 2А614-1 расположенном ниже.
| Наименование параметров | Ед.изм. | Величины |
| Класс точности станка по ГОСТ 8-77 | Н | |
| Диаметр выдвижного шпинделя | мм | 80 |
| Конец выдвижного шпинделя с конусом для крепления инструмента | 40АТ5, Морзе 5 | |
| Размеры встроенного поворотного стола (Д х Ш) | мм | 1000×1000 |
| Вертикальное перемещение шпиндельной бабки | мм | 800 |
| Продольное перемещение выдвижного шпинделя | мм | 500 |
| Продольное перемещение встроенного поворотного стола | мм | 1000 |
| Поперечное перемещение встроенного поворотного стола | мм | 1000 |
| Радиальное перемещение суппорта встроенной планшайбы | мм | 125 |
| Частота вращения выдвижного шпинделя | об/мин | 20…1600 |
| Частота вращения планшайбы | об/мин | 6,3…200 |
| Пределы подач рабочих органов | мм/об | 0,02…8 |
Пределы подач выдвижного шпинделя, шпиндельной бабки, стола в обоих направл. | мм/мин | 1,26…2000 |
| Пределы подач суппорта встроенной планшайбы | мм/мин | 0,5…800 |
| Скорость быстрых установочных перемещений шпинделя выдвижного, бабки, стола | мм/мин | 5000 |
| Скорость быстрых установочных перемещений суппорта встроенной планшайбы | мм/мин | 2000 |
| Наибольший допустимый крутящий момент на выдвижном шпинделе | Нм | 865 |
| Наибольший допустимый крутящий момент на строенной планшайбе | Нм | 1300 |
| Наибольшее допустимое усилие подачи шпинделя | кН | 7,5 |
| Наибольшее допустимое усилие подачи стола | кН | 10 |
| Наибольшая масса обрабатываемого изделия | кг | 2000 |
| Габаритные размеры станков без приставного оборудования (ДхШхВ) | мм | 4518х2590х2585 |
| Масса станков без электрооборудования и принадлежностей | кг | 8500 |
Конструктивные особенности
Конструкция сверлильного станка состоит:
- Рабочая головка, которая служит для закрепления инструмента.
- Привод.
- Насос масляный плунжерного типа.
- Система охлаждения обрабатываемой зоны.
- Шпиндель.
- Коробка подач.
- Система электроснабжения агрегата, электрический шкаф для подключения к сети.
- Коробка скоростей.
- Система контроля скорости и подачи.
- Плита основания, колонна, рабочий стол.

Станина агрегата сделана в виде монолитной, массивной, чугунной конструкции. Положение производительной поверхности выполняется оператором по несущей колонне вручную, путём отжима фиксирующего устройства и поворота штурвала, выполняющего функцию регулировки положения шпинделя. Для движения поверхности стола на колонне сделаны специальные направляющие пазы.
А также чугунной является и опорная плита. Она имеет пустотелую конструкцию, внутри которой находится ёмкость для хранения жидкости охлаждения. Там же расположен отстойник для металлических крупных загрязнений и устройство фильтрации. На самой опорной колонне располагается электрический насос мощностью 120 Вт, который отвечает за подачу жидкости. Подача охлаждающей жидкости осуществляется через систему различного диаметра трубок, которые подают воду непосредственно к сверлильному элементу.
На самой опорной колонне располагается электрический насос мощностью 120 Вт, который отвечает за подачу жидкости. Подача охлаждающей жидкости осуществляется через систему различного диаметра трубок, которые подают воду непосредственно к сверлильному элементу.
Силовой агрегат станка располагается на верху корпуса. Шпиндельный блок и коробка передач станка располагаются в корпусе. Кинематическая схема оборудования имеет простое конструктивное решение, при котором силовой агрегат и скоростная коробка соединены прямым валом. Механическая регулировка скоростей осуществляется с помощью рукоятки, размещённой на фронтальной стороне сверлильной головки. Регулировка скорости производится вручную. Коробка осуществляет передачу скорости вращения шпинделя на двенадцати частотах.
Смазка работающих элементов агрегата осуществляется с помощью плунжерного насоса в автоматическом режиме. Оператору понадобится только контролировать по датчику, который расположен на фронтальной панели, уровень количества масла.
На этой модели установлена система ручной подачи шпинделя. Эта система включает в себя:
- Штурвал, который выполняет регулировочную функцию.
- Передачу червячного вида.
- Обгонной храповой и кулачной муфты.
- Лимба.
- Вала, горизонтального расположения, с реечной шестерней.
Принцип действия
Эксплуатация станка в действующем режиме происходит по следующему принципу. Обрабатываемую заготовку, необходимо установить и надёжно зафиксировать на рабочей поверхности координатного стола. Шпиндель с установленным инструментом должен располагаться в крайнем положении снизу. Используя систему продольного смещения рабочего стола, шпиндель необходимо отцентрировать.
Затем нужно убедиться в соосном расположении торца детали, предназначенной для обработки, и шпинделя. Исходя из кинематической возможности, в коробке скоростной передачи выбираем скорость вращения, подходящую для обработки. Включаем вертикальный электрический двигатель главного привода.
Включаем вертикальный электрический двигатель главного привода.
После настройки кинематической схемы, осуществляется движение инструментальной головки к торцу обрабатываемого изделия, и выполняют нужную технологическую операцию.
Устройство и особенности аппарата
Устройство агрегата данного типа включает в себя следующие элементы:
- шпиндель;
- коробка скоростей;
- основание, рабочее место и колонна;
- привод;
- головка для закрепления инструмента;
- электрический шкаф;
- охлаждающая система;
- коробка подач;
- система, контролирующая скорости и подачи;
- плунжерный масляный насос.
Плунжерный масляный насос
У вертикально-сверлильных станков техническая характеристика свидетельствует об их универсальности. Данными аппаратами можно выполнять не только сверление, но и зенкерование, рассверливание, нарезание резьбы и развертывание отверстий.
Это происходит благодаря применению прочных и твердых инструментов, выполненных из хорошо режущих сталей.
Возможность нарезания резьбы машинными метчиками обеспечивается за счет реверсивности шпинделя, благодаря которой он может двигаться в обе стороны.
Основные особенности аппарата заключаются в следующем:
- вес станка — 1199 кг;
- крутящий момент шпинделя максимально может достигать 399 Нм;
- наличие системы остановки работы шпинделя;
- максимально допустимое усилие, при котором выполняется подача, составляет 15 кН;
- применение электронасоса типа Х14-22М в составе конструкции для передачи жидкости для охлаждения в место обработки;
- габариты рабочего стола составляют 449*499 мм, на поверхности которого предусмотрены пазы в количестве трех штук в форме буквы «Т».
Одной из главных технологических особенностей станка является его 100-процентное ручное управление. Все этапы работы регулируются вручную, а подача шпинделя осуществляется механически.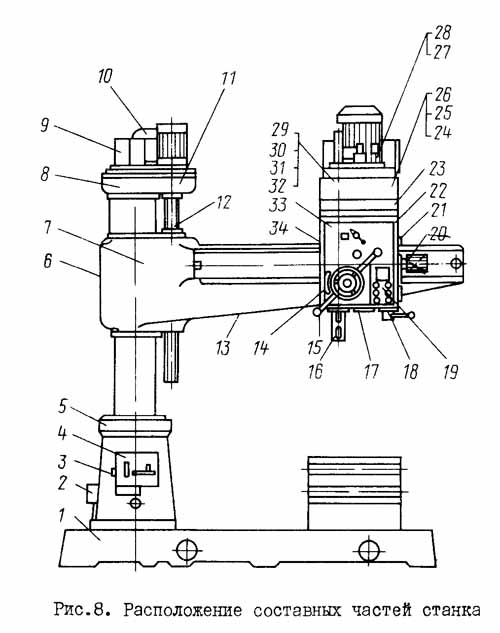
Читайте также: Особенности выбора дуг для сооружения парников и теплиц: какой материал лучше, как согнуть своими силами, правила фиксации
Общие характеристики агрегата включают в себя три большие части:
- рабочее место-стол, на котором находится деталь, подлежащая обработке;
- устойчивая чугунная станина, имеющая пространство внутри для электрического оборудования;
- сверлильная головка со шпинделем, которая движется по вертикали при помощи червячного вала.
Могут ли роботы помочь работающим родителям с уходом за детьми? Оптимизация функций ухода за детьми для различных характеристик воспитания
1. Фонг Т., Нурбахш И., Даутенхан К. Обзор социально интерактивных роботов. Робот Auton Syst. 2003; 42: 143–166. doi: 10.1016/S0921-8890(02)00372-X. [CrossRef] [Google Scholar]
2. Feil-Seifer D, Mataric MJ (2005) Определение социально вспомогательной робототехники. 9-я Международная конференция по реабилитационной робототехнике, 2005 г. ICORR 2005 465–468. doi: 10.1109/ICORR.2005.1501143
ICORR 2005 465–468. doi: 10.1109/ICORR.2005.1501143
3. Lee KM, Jung Y, Kim J, Kim SR. Являются ли физически воплощенные социальные агенты лучше, чем бестелесные социальные агенты?: Эффекты физического воплощения, тактильного взаимодействия и одиночества людей при взаимодействии человека и робота. Int J Hum Comput Stud. 2006; 64: 962–973. doi: 10.1016/j.ijhcs.2006.05.002. [CrossRef] [Google Scholar]
4. Фридин М., Белокопытов М. Восприятие социально-ассистированного робота-гуманоида педагогами дошкольных и начальных классов. Вычислить Hum Behav. 2014; 33:23–31. doi: 10.1016/j.chb.2013.12.016. [Перекрестная ссылка] [Академия Google]
5. Li J. Преимущество физического присутствия. Обзор экспериментальных работ, сравнивающих роботов, присутствующих в теле, роботов с телеприсутствием и виртуальных агентов. J Hum Comput Stud. 2015;77:23–37. doi: 10.1016/j.ijhcs.2015.01.001. [CrossRef] [Google Scholar]
6. Belpaeme T, Kennedy J, Ramachandran A, et al. Социальные роботы для образования: обзор. Научный робот. 2018;3:eaat5954. doi: 10.1126/scirobotics.aat5954. [PubMed] [CrossRef] [Google Scholar]
Научный робот. 2018;3:eaat5954. doi: 10.1126/scirobotics.aat5954. [PubMed] [CrossRef] [Google Scholar]
7. Bainbridge WA, Hart JW, Kim ES, Scassellati B. Преимущества взаимодействия с физически присутствующими роботами по сравнению с агентами, отображаемыми на видео. Int J of Soc Robotics. 2010;3:41–52. дои: 10.1007/s12369-010-0082-7. [CrossRef] [Google Scholar]
8. Jo D, Lee J-G, Lee KC. Эмпирический анализ изменений креативности человека у людей, работающих с человекоподобными роботами и их аватарами. В: Zaphiris P, Ioannou A, редакторы. Технологии обучения и сотрудничества. Проектирование и разработка нового опыта обучения. Чам: Спрингер; 2014. С. 273–281. [Google Scholar]
9. Belpaeme T, Baxter PE, Read R, et al. Мультимодальное взаимодействие ребенка и робота: создание социальных связей. Взаимодействие J Hum-Robot. 2013; 1:1–21. дои: 10,5898/JHRI.1.2.Белпаеме. [CrossRef] [Google Scholar]
10. Оонака С. (2013) Робот для ухода за детьми и метод управления роботом. Патент США № 8,376,803. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
Патент США № 8,376,803. Вашингтон, округ Колумбия: Ведомство США по патентам и товарным знакам.
11. Кан П.Х., младший, Гэри Х.Е., Шен С. Социальные отношения детей с роботами настоящего и ближайшего будущего. Перспектива детского разработчика. 2012;7:32–37. doi: 10.1111/cdep.12011. [CrossRef] [Google Scholar]
12. Mwangi E, Barakova EI, Diaz M, et al. Подсказки на основе взгляда во время игры с ребенком-роботом. В: Kheddar A, Yoshida E, Sam Ge S, Suzuki K, Cabibihan JJ, Eyssel F, He H и др., редакторы. Компьютерные информационные системы и промышленный менеджмент. Чам: Спрингер; 2017. С. 413–422. [Академия Google]
13. Венчур Г., Индурхья Б., Изуи Т. Танцуй со мной, взаимодействие ребенка и робота в дикой природе. В: Kheddar A, Yoshida E, Sam Ge S, Suzuki K, Cabibihan JJ, Eyssel F, He H, редакторы. Компьютерные информационные системы и промышленный менеджмент. Чам: Спрингер; 2017. С. 375–382. [Google Scholar]
14. Сиоми М., Хагита Н. Социальное признание роботизированной системы поддержки ухода за детьми: онлайн-исследование культурных различий и полевое исследование в Японии. Рекламный робот. 2017; 31:1–12. дои: 10.1080/01691864.2017.1345322. [CrossRef] [Google Scholar]
Рекламный робот. 2017; 31:1–12. дои: 10.1080/01691864.2017.1345322. [CrossRef] [Google Scholar]
15. Генрих CJ. Занятость родителей и благополучие детей. Общественное мнение Q. 2014; 24: 121–146. дои: 10.2307/23723386. [PubMed] [CrossRef] [Google Scholar]
16. Хсин А., Фельфе К. Когда время имеет значение? занятость матери, время, которое дети проводят с родителями, и развитие ребенка. Демогр. 2014; 51:1867–1894. doi: 10.1007/s13524-014-0334-5. [Статья PMC бесплатно] [PubMed] [CrossRef] [Google Scholar]
17. Бернал Р. Влияние материнской занятости и ухода за детьми на когнитивное развитие детей. Международная экономическая редакция 2008; 49: 1173–1209. doi: 10.1111/j.1468-2354.2008.00510.x. [CrossRef] [Google Scholar]
18. Arroyo D, Ishiguro Y, Tanaka F (2017) Design of Home Telepresence Robot System for Support Care Child. В: CSCW ’17 Companion. ACM Press, Нью-Йорк, Нью-Йорк, США, стр. 131–134
19. Kwak S, Jung J, Shin E, Kim MS. Рекомендации по проектированию роботов для ухода за детьми с этнографическими исследованиями двойного дохода и единого дохода. Bull Jpn Soc Sci Des. 2008; 55: 65–74. [Google Scholar]
Bull Jpn Soc Sci Des. 2008; 55: 65–74. [Google Scholar]
20. Осада Дж., Онака С., Сато М. Сценарий и процесс проектирования робота по уходу за детьми. PaPeRo Adv Comput Entertainment Technol. 2006 г.: 10.1145/1178823.1178917. [CrossRef] [Google Scholar]
21. Cagiltay B, Ho HR, Michaelis JE, Mutlu B (2020) Изучение семейного восприятия и предпочтений в дизайне домашнего робота. В: IDC ’20. ACM, Нью-Йорк, штат Нью-Йорк, США, стр. 229–242
22. Танака Ф., Мацузоэ С. Дети учат заботливого робота, чтобы способствовать их обучению: полевые эксперименты в классе для изучения словарного запаса. Взаимодействие J Hum-Robot. 2012; 1:78–95. doi: 10.5898/JHRI.1.1.Tanaka. [CrossRef] [Google Scholar]
23. Hood D, Lemaignan S, Dillenbourg P (2015) Когда дети учат робота писать: автономный обучаемый гуманоид, который использует имитацию почерка. 2015 10-я Международная конференция ACM/IEEE по взаимодействию человека и робота (HRI) 83–90. doi: 10.1145/2696454.2696479
24. Хан Дж., Джо М., Парк С., Ким С. (2005) Использование домашних роботов в образовательных целях для детей. РИМАН, 2005 г. Международный семинар IEEE по интерактивному общению роботов и людей, 2005 г., стр. 378–383. doi: 10.1109/ROMAN.2005.1513808
Хан Дж., Джо М., Парк С., Ким С. (2005) Использование домашних роботов в образовательных целях для детей. РИМАН, 2005 г. Международный семинар IEEE по интерактивному общению роботов и людей, 2005 г., стр. 378–383. doi: 10.1109/ROMAN.2005.1513808
25. Маднани Н., Клебанов Б.Б., Лукина А. и соавт. Моя очередь читать – инструмент для чтения электронных книг с чередованием для развивающихся и борющихся читателей. ACL. 2019 г.: 10.18653/v1/p19-3024. [CrossRef] [Google Scholar]
26. Шорт Э., Свифт-Спонг К., Гречек Дж. и др. (2014 г.) Как обучить своего DragonBot: Социально-вспомогательные роботы для обучения детей питанию через игру. 23-й Международный симпозиум IEEE по интерактивной коммуникации роботов и людей 924–929. 10.1109/ROMAN.2014.6926371
27. Abe K, Shiomi M, Pei Y, et al. ChiCaRo: робот телеприсутствия для взаимодействия с младенцами и малышами. Рекламный робот. 2018;32:176–190. doi: 10.1080/01691864.2018.1434014. [CrossRef] [Google Scholar]
28. Cabibihan JJ, Javed H, Ang M, Jr, Aljunied SM. Почему роботы? обзор роли и преимуществ социальных роботов в терапии детей с аутизмом. Int J of Soc Robotics. 2013;5:593–618. doi: 10.1007/s12369-013-0202-2. [Перекрестная ссылка] [Академия Google]
Почему роботы? обзор роли и преимуществ социальных роботов в терапии детей с аутизмом. Int J of Soc Robotics. 2013;5:593–618. doi: 10.1007/s12369-013-0202-2. [Перекрестная ссылка] [Академия Google]
29. Clabaugh C, Becerra D, Deng E, et al. ХРИ ’18. Нью-Йорк, штат Нью-Йорк, США: ACM; 2018. Месячное домашнее исследование социально-вспомогательного робота для детей с расстройством аутистического спектра; стр. 87–88. [Google Scholar]
30. Лин С., МакДорман К.Ф., Шабанович С. и др. (2020) Родительские ожидания, опасения и принятие роботов-рассказчиков для детей. В: HRI ’20. ACM, Нью-Йорк, штат Нью-Йорк, США, стр. 346–348. doi: 10.1145/3371382.3378376
31. Орос М., Николич М., Боровац Б., Еркович И. Предпочтения детей во внешности и отношение родителей к вспомогательным роботам*. Международная конференция IEEE-RAS по роботам-гуманоидам. 2014; 2014: 360–365. дои: 10.1109/ГУМАНОИДЫ.2014.7041385. [CrossRef] [Google Scholar]
32. Бургер К. Как воспитание и образование детей младшего возраста влияют на когнитивное развитие? Международный обзор эффектов раннего вмешательства для детей из разных социальных слоев. Ежеквартальное исследование раннего детства. 2010;25:140–165. doi: 10.1016/j.ecresq.2009.11.001. [CrossRef] [Google Scholar]
Ежеквартальное исследование раннего детства. 2010;25:140–165. doi: 10.1016/j.ecresq.2009.11.001. [CrossRef] [Google Scholar]
33. Chaudry A, Pedroza JM, Sandstrom H, et al (2011) Выбор ухода за детьми в семьях с низким доходом. Урбанистический институт. 2100 M Street NW, Washington, DC 20037. Тел.: 202–261–5687; Факс: 202–467–5775; Веб-сайт: http://www.urban.org
34. Фиорини М., Кин М.П. Как распределение детского времени влияет на когнитивное и некогнитивное развитие. J Law Econ. 2014; 32: 787–836. дои: 10.1086/677232. [CrossRef] [Google Scholar]
35. Fox L, Han WJ, Ruhm C, Waldfogel J. Время для детей: тенденции в моделях занятости родителей, 1967–2009 гг. Демогр. 2013;50:25–49. doi: 10.1007/s13524-012-0138-4. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
36. Ruggiero TE. Теория использования и удовлетворения в 21 веке. Массовая коммуна Соц. 2000; 3:3–37. doi: 10.1207/S15327825MCS0301_02. [Перекрестная ссылка] [Академия Google]
37. Луо М.М., Ремус В. Использование, удовлетворение и принятие информационных услуг в Интернете: интегрированная модель. Вычислить Hum Behav. 2014; 38: 281–295. doi: 10.1016/j.chb.2014.05.042. [CrossRef] [Google Scholar]
Луо М.М., Ремус В. Использование, удовлетворение и принятие информационных услуг в Интернете: интегрированная модель. Вычислить Hum Behav. 2014; 38: 281–295. doi: 10.1016/j.chb.2014.05.042. [CrossRef] [Google Scholar]
38. Пак Н., Ли К.М., Джин С.А.А., Кан С. Влияние историй перед игрой на ощущение присутствия и оценку компьютерных игр. Журнал компьютерных исследований человека. 2010; 68: 822–833. doi: 10.1016/j.ijhcs.2010.07.002. [CrossRef] [Google Scholar]
39. Сундар С.С., Лимперос А.М. Uses and gratifications 2.0: новые удовольствия для новых медиа. J Радиовещательные электронные СМИ. 2013; 57: 504–525. doi: 10.1080/08838151.2013.845827. [Перекрестная ссылка] [Академия Google]
40. де Грааф ММА, Бен Аллуш С. Изучение факторов, влияющих на принятие социальных роботов. Робот Auton Syst. 2013;61:1476–1486. doi: 10.1016/j.robot.2013.07.007. [CrossRef] [Google Scholar]
41. де Грааф ММА, Бен Аллуш С., ван Дейк JAGM. Зачем мне использовать это дома? модель принятия домашних социальных роботов. Hum-Computer Interact. 2017;00:1–59. doi: 10.1080/07370024.2017.1312406. [CrossRef] [Google Scholar]
Hum-Computer Interact. 2017;00:1–59. doi: 10.1080/07370024.2017.1312406. [CrossRef] [Google Scholar]
42. Цзэн Дж. И. Воспринимаемые ценности и принятие перспективных технологий потенциальными пользователями: случай системы карьерного электронного портфолио. Компьютерное образование. 2011; 56: 157–165. doi: 10.1016/j.compedu.2010.08.010. [Перекрестная ссылка] [Академия Google]
43. Лейте И., Кастеллано Г., Перейра А. и др. Эмпатические роботы для долгосрочного взаимодействия. Int J of Soc Robotics. 2014; 6: 329–341. doi: 10.1007/s12369-014-0227-1. [CrossRef] [Google Scholar]
44. Шиоми М., Наката А., Канбара М., Хагита Н. Робот Hug, который поощряет самораскрытие. В: Kheddar A, Yoshida E, SamGe S, Suzuki K, Cabibihan JJ, Eyssel F, He H, редакторы. Компьютерные информационные системы и промышленный менеджмент. Чам: Спрингер; 2017. С. 324–333. [Академия Google]
45. Bethel CL, Henkel Z, Stives K, et al (2016) Использование роботов для опроса детей о травле: уроки, извлеченные из исследовательского исследования. 2016 г. 25-й Международный симпозиум IEEE по интерактивному общению роботов и людей (RO-MAN) 712–717. doi: 10.1109/ROMAN.2016.7745197
2016 г. 25-й Международный симпозиум IEEE по интерактивному общению роботов и людей (RO-MAN) 712–717. doi: 10.1109/ROMAN.2016.7745197
46. Köse H, Uluer P, Akalın N, et al. Эффект воплощения в обучении жестовому языку с помощью роботов-гуманоидов-ассистентов. Int J of Soc Robotics. 2015;7:537–548. doi: 10.1007/s12369-015-0311-1. [Перекрестная ссылка] [Академия Google]
47. Айзен И. Теория запланированного поведения. Орган Хум Децис Процесс. 1991; 50: 179–211. doi: 10.1016/0749-5978(91)
-T. [CrossRef] [Google Scholar]
48. Дэвис Ф.Д. Воспринимаемая полезность, воспринимаемая простота использования и принятие пользователями информационных технологий. MIS Q. 1989; 13:319. дои: 10.2307/249008. [CrossRef] [Google Scholar]
49. Дарлинг Н., Стейнберг Л. Стиль воспитания как контекст: интегративная модель. Dev Psychol Monog. 1993; 113: 487–496. [Академия Google]
50. Баумринд Д. Современные модели родительской власти. Dev Psychol Monog. 1971; 4: 1–103. doi: 10.1037/h0030372. [CrossRef] [Google Scholar]
doi: 10.1037/h0030372. [CrossRef] [Google Scholar]
51. Баумринд Д. Влияние стиля воспитания на компетентность подростков и употребление психоактивных веществ. J Ранний подростковый возраст. 1991; 11: 56–95. doi: 10.1177/0272431691111004. [CrossRef] [Google Scholar]
52. Adams G, Tood M (2020) Удовлетворение потребностей работающих родителей в уходе за детьми школьного возраста, сталкивающихся с дистанционным обучением COVID-19. Городской институт
53. Österbacka E, Merz J, Zick CD (2010) Инвестиции в человеческий капитал для детей: сравнительный анализ роли совместного времени родителей и детей в отдельных странах.
54. Ортнер Д.К., Манчини Дж.А. Досуг влияет на взаимодействие и сплоченность семьи. Джей Лейс Рез. 1990; 22: 125–137. doi: 10.1080/00222216.1990.11969820. [CrossRef] [Google Scholar]
55. Шоу С.М., Доусон Д. Целенаправленный досуг: изучение рассуждений родителей о семейной деятельности. Лейс Сци. 2001; 23: 217–231. дои: 10.1080/014
152809098. [CrossRef] [Google Scholar]
[CrossRef] [Google Scholar]
56. Крейг Л., Муллан К. Отцовство, пол и время работы и семьи в США, Австралии, Италии, Франции и Дании. J Брак Fam. 2010;72:1344–1361. doi: 10.1111/j.1741-3737.2010.00769.x. [CrossRef] [Google Scholar]
57. Эриксон Э. Детство и общество. WW: Нортон и компания; 1993. [Google Scholar]
58. Кулахан К., Фантуццо Дж., Мендес Дж., Макдермотт П. Взаимодействие со сверстниками в дошкольном возрасте и готовность к обучению: взаимосвязь между игрой в классе и учебным поведением. Dev Psychol Monog. 2000;92: 458–465. doi: 10.1037/0022-0663.92.3.458. [CrossRef] [Google Scholar]
59. Леман П.Дж., Олдхэм З. Нужно ли детям учиться сотрудничать? Когн Дев. 2005; 20:33–48. doi: 10.1016/j.cogdev.2004.07.002. [CrossRef] [Google Scholar]
60. Lemerise EA. Модели принятия сверстников, социального статуса и социальной репутации в разновозрастных дошкольных и начальных классах. Общественное мнение Q. 1997; 43: 199–218. дои: 10.2307/23092488. [CrossRef] [Google Scholar]
[CrossRef] [Google Scholar]
61. Кнафо А., Пломин Р. Просоциальное поведение от раннего до среднего детства: генетическое и средовое влияние на стабильность и изменения. Дев Психология. 2006; 42: 771–786. дои: 10.1037/0012-1649.42.5.771. [PubMed] [CrossRef] [Google Scholar]
62. Саарни К. Понимание детьми межличностных последствий невербального эмоционально-экспрессивного поведения. J Невербальное поведение. 1988; 12: 275–294. doi: 10.1007/BF00987596. [CrossRef] [Google Scholar]
63. Sommer K, Nielsen M, Draheim M, et al. Представления детей о моральной ценности живых агентов, роботов и неодушевленных предметов. J Exp Детская психология. 2019;187:104656. doi: 10.1016/j.jecp.2019.06.009. [PubMed] [CrossRef] [Академия Google]
64. Sciutti A, Rea F, Sandini G (2014) Когда ты молод, внешний вид (робота) имеет значение. Эволюционные изменения желаемых свойств робота-друга. В: 23-й Международный симпозиум IEEE по интерактивному общению роботов и людей. IEEE, стр. 567–573. Doi: 10.1109/ROMAN.2014.6926313
567–573. Doi: 10.1109/ROMAN.2014.6926313
65. Martínez-Miranda J, Pérez-Espinosa H, Espinosa-Curiel I, et al. Возрастные различия в предпочтениях и аффективных реакциях на личность робота во время взаимодействия. Вычислить Hum Behav. 2018; 84: 245–257. doi: 10.1016/j.chb.2018.02.039. [CrossRef] [Google Scholar]
66. Тунг Ф.В. Влияние пола и возраста на отношение детей к роботам-гуманоидам. Берлин, Гейдельберг, Берлин: Springer; 2011. стр. 637–646. [Google Scholar]
67. Шахид С., Крамер Э., Свертс М., Мубин О. Взаимодействие ребенка и робота во время совместной игры — влияние возраста и пола на эмоции и опыт. Нью-Йорк, США: ACM Press; 2010. С. 332–335. [Google Scholar]
68. Doh H-S, Falbo T. Социальная компетентность, материнская внимательность и чрезмерная защита: единственные дети в Корее. Int J Behav Dev. 1999;23:149–162. doi: 10.1080/016502599384044. [CrossRef] [Google Scholar]
69. Меллор С. Чем только дети отличаются от других детей? J Genet Psychol. 1990; 151: 221–230. doi: 10.1080/00221325.1990.9914656. [PubMed] [CrossRef] [Google Scholar]
1990; 151: 221–230. doi: 10.1080/00221325.1990.9914656. [PubMed] [CrossRef] [Google Scholar]
70. Falbo T, Polit D. Количественный обзор единственной детской литературы: данные исследований и развитие теории. Dev Psychol Monog. 1986; 100: 176–198. [Google Scholar]
71. Sweeney JC, Soutar GN. Воспринимаемая потребителем ценность: разработка шкалы из нескольких пунктов. Джей Ритейл. 2001; 77: 203–220. дои: 10.1016/s0022-4359(01)00041-0. [CrossRef] [Google Scholar]
72. Гревал Д., Монро К.Б., Кришнан Р. Влияние рекламы со сравнением цен на восприятие покупателями стоимости приобретения, стоимости сделки и поведенческих намерений. Дж Марк. 1998;62:46. дои: 10.2307/1252160. [CrossRef] [Google Scholar]
73. Гефен Д., Штрауб Д., Будро М.-К. Моделирование структурными уравнениями и регрессия: рекомендации по исследовательской практике. ТАИС. 2000; 4:1–78. doi: 10.17705/1CAIS.00407. [CrossRef] [Академия Google]
74. фон Люксбург У. Учебное пособие по спектральной кластеризации. Стат расчет. 2007; 17: 395–416. doi: 10.1007/s11222-007-9033-z. [CrossRef] [Google Scholar]
Стат расчет. 2007; 17: 395–416. doi: 10.1007/s11222-007-9033-z. [CrossRef] [Google Scholar]
75. Джеймс Г., Виттен Д., Хасти Т., Тибширани Р. Компромисс смещения и дисперсии для перекрестной проверки K-кратности. Introd Stat Learn. 2013 г.: 10.1007/978-1-4614-7138-7. [CrossRef] [Google Scholar]
76. Nathanson AI, Sharp ML, Aladé F, et al. Связь между телевизионным воздействием и теорией разума у дошкольников. Дж коммун. 2013;63:1088–1108. doi: 10.1111/jcom.12062. [Перекрестная ссылка] [Академия Google]
77. Парк Х, Коэльо Дж. А., Лау А. С. Цели социализации детей в восточноазиатских и западных странах с 1989 по 2010 год: свидетельство социальных изменений в воспитании детей. Родительская научная практика. 2014;14:69–91. doi: 10.1080/15295192.2014.914345. [CrossRef] [Google Scholar]
78. Greenfield PM. Связь социальных изменений и изменений в развитии: изменение путей человеческого развития. Дев Психология. 2009; 45: 401–418. doi: 10.1037/a0014726. [PubMed] [CrossRef] [Google Scholar]
79. Keller H, Lamm B, Abels M, et al. Культурные модели, цели социализации и этнотеории воспитания. J Cross Cult Psychol. 2016; 37: 155–172. дои: 10.1177/0022022105284494. [CrossRef] [Google Scholar]
Keller H, Lamm B, Abels M, et al. Культурные модели, цели социализации и этнотеории воспитания. J Cross Cult Psychol. 2016; 37: 155–172. дои: 10.1177/0022022105284494. [CrossRef] [Google Scholar]
80. Симидзу М., Парк Х., Гринфилд П. Детские спальные места и культурные ценности современных японских матерей. Фронт Псих. 2014; 5:1–10. doi: 10.3389/fpsyg.2014.00718/аннотация. [Бесплатная статья PMC] [PubMed] [CrossRef] [Google Scholar]
81. Бьянки С., Робинсон Дж., Милки М. Изменение ритмов американской семейной жизни. Нью-Йорк: Рассел Сейдж; 2006. [Google Scholar]
82. Азьен И. и Фишбейн М. (1980) Понимание отношений и предсказание социального поведения. Энглвудские скалы.
83. МакКоби Э. и Мартин А. (1983). Социализация в контексте семьи: взаимодействие родителей и детей. Справочник по детской психологии.
84. Будман, С. и Будман, Г. (1995, 24 октября). Единственный ребенок: одинокий или счастливый? Вашингтон Пост. https://www.washingtonpost.com/archive/lifestyle/wellness/1995/10/24/the-only-child-lonely-or-lucky/ec6eedc4-d198-4770-abcc-66da9005af27/
85. Милевский, А. (2015, 10 июня). «Синдром единственного ребенка»: как братья и сестры или их отсутствие влияют на вашу личность? Независимый. https://www.independent.co.uk/life-style/health-and-families/features/only-child-syndrome-how-do-siblings-or-lack-them-affect-your-personality-10309792.html
Милевский, А. (2015, 10 июня). «Синдром единственного ребенка»: как братья и сестры или их отсутствие влияют на вашу личность? Независимый. https://www.independent.co.uk/life-style/health-and-families/features/only-child-syndrome-how-do-siblings-or-lack-them-affect-your-personality-10309792.html
86. Исследовательский центр Пью, 2015 Исследовательский центр Пью. (2015. 4 ноября). Воспитание детей и ведение домашнего хозяйства: как работающие родители распределяют нагрузку.
87. Исследовательский центр Пью, 2015 Исследовательский центр Пью. (2015. 17 декабря). Американская семья сегодня.
88. Кан П.Х., Канда Т., Исигуро Х. и др. «Робови, теперь тебе пора в чулан»: социальные и нравственные отношения детей с человекоподобным роботом.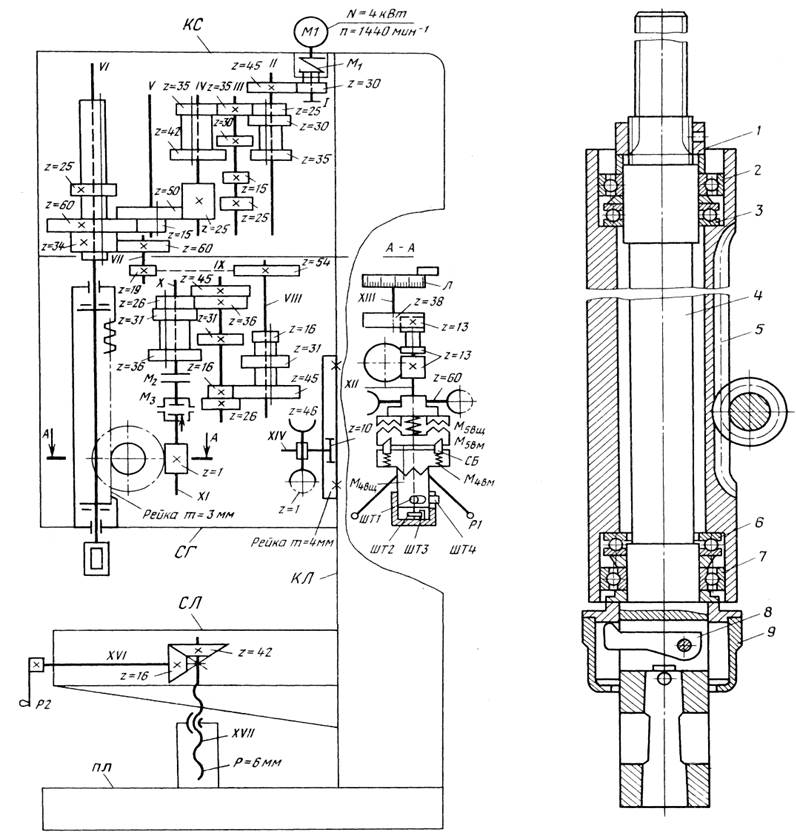 Дев Психология. 2012;48:303–314. doi: 10.1037/a0027033. [PubMed] [CrossRef] [Google Scholar]
Дев Психология. 2012;48:303–314. doi: 10.1037/a0027033. [PubMed] [CrossRef] [Google Scholar]
2N135 Amy Ave, Glen Ellyn, IL 60137 | MLS# 10249694
OFF MARKET
Просмотр улиц
Просмотреть все 5 фотографий
Об этом доме
Главная Факты
Статус0003
Закрытая продажа
Property TypedEtached Одиночная семья, 1 этаж
года построен1956
CommunityGlen Ellyn
Размер лоты0,44 Акрона
MLS#10249694
Price Insights
REDFIN ESTITICE
9000 2482 9000 2482. 196 футов
Комиссия агента покупателя
2,34%
Главная Факты
Статус
Закрытая продажа
Тип недвижимостиОтдельный на одну семью, 1 этаж
Year Built1956
CommunityGlen Ellyn
Lot Size0. 44 Acres
44 Acres
MLS#10249694
Price Insights
Redfin Estimate
$249,886
Price/Sq.Ft.$196
Buyer’s Agent Commission
2.34%
Просмотр улиц
Схема проезда
Парковка
- Количество автомобилей: 2
- Количество мест в гараже: 2
- Парковка в гараже
- Механизм открывания ворот гаража
- Attached Garage
- Garage On-Site
- Owned Garage
- Asphalt Driveway
Информация о парковке
Interior
- # of Bedrooms: 3
- # of Bedrooms (Above Grade): 3
Bedroom Information
- Размер: 13X09
- Камбуз
- На основном этаже
- Виниловые полы
- Жалюзи
Kitchen Информация
- Холодильник, стиральная машина, посудомоечная машина, кухонная плита0258
Оборудование
- Hardwood Flooring, Wood Laminate Flooring, 1st Floor Bedroom, 1st Floor Full Bath
Interior Features
- Gas Heating
- Central Air Conditioning
Heating & Cooling
Exterior
- Патио, открытый гриль
Property Features
- Размеры: 101X190
- 0,25–0,49 акра
Информация о лоте
Финансы
Коммунальные услуги
- Вода: скважина (частная)
- Септик (частный)
- 200+ Служба AMP
Информация о коммунальной службе
Расположение
. Округ средней школы: 87
Округ средней школы: 87
Другое
- Цена продажи включает парковку
- Владение: Закрытие
- Задаток: Да
- Уступки продавцу: Да
- Сумма/баллы уступок продавцу: 3500
Информация о листинге
Информация об имуществе предоставлена MRED при последнем листинге в 2019 году. Эти данные могут не совпадать с общедоступными записями. Узнать больше.
- История продаж
- Налоговая история
- Публичные факты
- Зонирование
Сводка по зонированию
Землепользование
Жилая зона Ave.965 долларов в месяц
30 лет, фиксированная ставка, 4,31% годовых
Платеж по ипотечным кредитам 708
Налоги на недвижимость 192
HOA DUES
Страхование домовладельцев $ 65
Коммунальные услуги и техническое обслуживание
Способность сэкономить
Просмотр Электроэнергии и соляные сбережения
Оценка затрат на электроэнергию и соляные сбережения
.
Непогашенная ипотека
Продажа через традиционного агентаПродажа через агента Redfin
+1 747 долл. США
Общая выручка от продажи
103 517 долл. США 105 264 долл. США
Seller Agent Commission
2.5% ($6,247)$4,500
Full Service Agent
Premium Placement on Redfin
Free Professional Photos
Free 3D Walkthrough
Buyer Agent Commission
$6,247$6,247
Excise Tax
$375 375 долларов США
Разное. Сборы
1 500 долларов США 1 500 долларов США
2 076 долларов США в месяц
Сводный рейтинг GreatSchools
Данные о школах предоставлены некоммерческой организацией GreatSchools. Redfin рекомендует покупателям и арендаторам использовать информацию и рейтинги GreatSchools в качестве первого шага, а также провести собственное расследование, чтобы определить желаемые школы или школьные округа, в том числе связавшись с самими школами и посетив их. Redfin не подтверждает и не гарантирует эту информацию. Границы школьных услуг предназначены только для справки; они могут измениться, и их точность не гарантируется. Чтобы проверить право на зачисление в школу, свяжитесь напрямую со школьным округом.
Redfin не подтверждает и не гарантирует эту информацию. Границы школьных услуг предназначены только для справки; они могут измениться, и их точность не гарантируется. Чтобы проверить право на зачисление в школу, свяжитесь напрямую со школьным округом.
32 / 100
Зависит от автомобиля
Walk Score®
40 / 100
В некоторой степени подходит для езды на велосипеде
Bike Score®
О климатических рисках и рисках стихийных бедствий
3 9 изменение климата из-за повышения температуры и уровня моря.
Данные о климатических рисках предоставляются только в информационных целях. Если у вас есть вопросы или отзывы об этих данных, обратитесь за помощью на Riskfactor.com и Climatecheck.com.
Redfin не подтверждает и не гарантирует эту информацию. Предоставляя эту информацию, Redfin и ее агенты не дают советов или рекомендаций по рискам наводнений, страхованию от наводнений или другим климатическим рискам. Redfin настоятельно рекомендует потребителям самостоятельно исследовать климатические риски недвижимости для собственного удовлетворения.

Продажи домов на одну семью (последние 30 дней)
Тенденции в продажах домов на одну семью в 60139
Дома на одну семью
Все типы домов Дома на одну семьюТаунхаусыКондоминиумы/кооперативы
Медианная цена продажи
Медианная цена продажи# домов Soldmedian Days On Marketsingl Family Homes
ВСЕ HOME TYPESSING FAMILY HOMESTOWNHOWNOSONDOS/COOPS
Средняя цена продажи
(Home Family Homes)
долл. г/г | Декабрь 2022 г.
На основе расчетов Redfin данных о домах из MLS и/или общедоступных записей.
$290 000
+5,5%
Подробнее о тенденциях рынка в 60139
Конкуренция на рынке в 60139
Рассчитано за последние 3 месяца
58
Довольно конкурентоспособная
Оценка Redfin Compete Score
™
Оценка Redfin Compete Score оценивает степень конкурентоспособности области по шкале от 0 до 1000, где 1 — это самая конкурентоспособная область.
Рассчитано за последние 3 месяца
- Некоторые дома получают несколько предложений.
- В среднем дома продаются примерно за 2% ниже прейскурантной цены и ожидают рассмотрения примерно через 58 дней .
Горячие дома
могут быть проданы примерно за 2% выше прейскурантной цены и ожидаются примерно через 39 дней .
Сравните с близлежащими почтовыми индексами
Что нужно, чтобы выиграть предложение рядом с 60139
Предложение ~$225K
8 недель назад
~0, SQ 90,12 3 футов ДомПредложение не принято — продано за 225 тысяч долларов
Ниже прейскурантной цены
10%
Дней на рынке
46
Конкурирующие предложения
Первоначальный взнос
<10%
Ближайшие недавно проданные дома
Близлежащие дома, похожие на 2N135 Amy Ave, недавно были проданы по средней цене от $266 тыс. за квадратный фут до $34,1 за квадратный фут.
за квадратный фут до $34,1 за квадратный фут.
1/19
Продано 26 сентября 2022
1/23
Продано 13 июня 2022
1 /17
Проданные 15 июня 2022
. пр.
Данные из общедоступных записей.
2N151 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 1 Ванны | 1674 кв. футов | 282 778 $ |
2N111 Эми Авеню, ГЛЕН ЭЛЛИН, Иллинойс 3 кровати | 2 ванны | 1127 кв. футов | 312 995 $ |
2N551 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 2 ванны | 1975 кв. футов | $341 518 |
2N631 Amy Avenue, Glen Ellyn, IL 3 кровати | 2 ванны | 2146 кв. футов | 330 946 $ |
2N049 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 1 Ванны | 1298 кв. футов | 234 215 $ |
2N225 Эми Авеню, Глен Эллин, Иллинойс 4 кровати | 2,5 Ванны | 1732 кв. | 309 323 $ |
2N060 Amy Avenue, GLEN ELLYN, IL 3 кровати | 1,5 Ванны | – кв. футов | 319 605 $ |
 футов
футов2N564 Эми Авеню, ГЛЕН ЭЛЛИН, Иллинойс 4 кровати | 2 ванны | 1646 кв. футов | 331 934 $ |
2N150 Amy Avenue, Глен Эллин, Иллинойс 3 кровати | 1,5 Ванны | 1463 кв. футов | 292 409 $ |
2N563 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 2 ванны | 1995 пл. футов | $331 170 |
2N643 Amy Avenue, Glen Ellyn, IL 3 кровати | 2 ванны | 1574 кв. футов | 356 613 $ |
2N061 Amy Avenue, GLEN ELLYN, IL 3 кровати | 1 Ванны | 1040 кв.м. футов | 210 882 $ |
2N230 Amy Avenue, Глен Эллин, Иллинойс 3 кровати | 1 Ванны | 1602 кв. футов | 253 992 $ |
2N072 Эми Авеню, ГЛЕН ЭЛЛИН, Иллинойс 3 кровати | 1 Ванны | 1000 кв. | 241 749 долларов |
 м. футов
м. футов2N590 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 2 ванны | 1847 кв. футов | 284 006 $ |
2N214 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 2 ванны | 1750 кв.м. футов | 299 845 $ |
2N579 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 1,5 Ванны | 1560 кв.м. футов | 273 582 $ |
2N550 Amy Avenue, GLEN ELLYN, IL 3 кровати | 1 Ванны | 1602 кв. футов | 219 576 $ |
2N073 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 1 Ванны | 1040 кв.м. футов | 227 691 $ |
2N356 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 2 ванны | 1500 кв.м. футов | 329 077 $ |
2N086 Эми Авеню, Глен Эллин, Иллинойс 3 кровати | 2 ванны | 2049 кв. футов | 305 237 долл. США США |
Показать больше
Часто задаваемые вопросы для 2N135 Amy Ave
Что такое 2N135 Amy Ave?
2N135 Amy Ave — это дом площадью 1275 квадратных футов на участке площадью 0,44 акра с 3 спальнями и 1 ванной комнатой. Этот дом в настоящее время не продается — последний раз он был продан 08 марта 2019 г. за 178 500 долларов США
Сколько фотографий доступно для этого дома?
У Redfin есть 5 фотографий 2N135 Amy Ave.
Сколько стоит этот дом?
Основываясь на данных Redfin’s Glen Ellyn, мы оцениваем стоимость дома в 249 долларов.,886
Когда этот дом был построен и в последний раз продан?
2N135 Amy Ave был построен в 1956 году и последний раз продан 8 марта 2019 года за 178 500 долларов.
Какова оценка арендной платы за этот дом?
По нашим оценкам, 2N135 Amy Ave будет стоить от 1804 до 2260 долларов.
Насколько конкурентоспособен рынок этого дома?
Основываясь на рыночных данных Redfin, мы подсчитали, что рыночная конкуренция в районе 60139, где расположен этот дом, несколько конкурентна.