Что означают эти 3 буквы ЧПУ Что означают эти 3 буквы ЧПУ
Home » Pyroprinter блог | Статьи о станке выжигателе ЧПУ » Что означают эти 3 буквы ЧПУ
Статья для тех, кто только где-то краем уха слышал эту аббревиатура ЧПУ, но не знает что это такое. И посмотрим какие бывают ЧПУ станки.
Расшифровка ЧПУ
ЧПУ расшифровывается как Числовое Программное Управление. Обычно от этой расшифровки не сильно понятнее становится о чем все таки идет речь.
Это обозначает, что имеется какой-то код, загружаемый в программу, которая сообщает устройству куда, как нужно двигаться и что, когда включить.
Самый простой пример ЧПУ устройства, который есть почти у всех — это обыкновенный принтер. Программа для принтера обрабатывает заданное изображение и подаёт на Ваш принтер сигналы для того, что бы тот начал подачу бумаги, далее управляет движением печатающей головки и момент в который капля краски должна выпуститься из картриджа, что бы получилась картинка или текст. Конечно это объяснено сильно упрощено, но в общих чертах достаточно понятно.
По такому же принципу работают абсолютно все ЧПУ станки. В программу дают какой-то код и она управляет станком. Так работают фрезерные ЧПУ, лазерные ЧПУ, 3Д принтеры, лазерные маркеры, Пиропринтер, токарные ЧПУ и т.д.
В отличии от принтера, о котором говорили ранее, где есть цифровая картинка (а картинка это код) и движения головки стандартные в зависимости от габаритов листа (влево и вправо), профессиональные станки с ЧПУ управляются при помощи написанного для них кода. Поэтому и существуют такие профессии как оператор ЧПУ и инженер программист ЧПУ. Программист составляет по чертежу конструктора программы, а оператор загружает их в станок, если требуется меняет инструмент, устанавливает материал и следит за правильным исполнением этих программ.
Есть и более современные станки, которые код могут генерировать автоматически. Но для них все равно нужен оператор ЧПУ, человек который будет менять материал, следить за тем когда запустить, с какого места запустить и когда остановить.
Устройство станков ЧПУ
Станки бывают с разным количеством осей. Самое распространенное это 3 оси: ось X (влево вправо), ось Y (вперёд назад) и ось Z (вверх вниз).
Так же станки делятся на модели портального типа и с подвижным столом. Т.е. зависит от того что двигается материал или инструмент по материалу. Если смотреть на принтер, то в данном случае двигается материал, т.е. бумага. Но если материал тяжелый, проще что бы двигался сам инструмент по материалу.
Также станки отличаются по точности и по материалам с которыми могут работать.
Почему выгодно использовать ЧПУ
Все станки ЧПУ созданы для автоматизации процессов и ускорения этапов обработки материала. Так получаются автоматизированные производства, которые работают сильно быстрее чем в ручную.
Еще преимущество таких станков в том, что такой станок часто делает то, что очень сложно сделать вручную. Либо для этого нужно быть супер мастером своего дела.
Программа для управления ЧПУ
Самая распространенная для ЧПУ программа — это MACh4. Это ПО для управления станками можно назвать народным. Внешне программа выглядит сложно, подходит она для управления фрезерными станками.
Это ПО для управления станками можно назвать народным. Внешне программа выглядит сложно, подходит она для управления фрезерными станками.
Для управления ЧПУ Пиропринтер мы сами разрабатывали программу, поэтому она не имеет лишних не нужных для выжигания настроек, дабы не пугать пользователя станком.
Вернуться обратно на страницу с описание станка ->
Что такое станок с ЧПУ: виды, характеристики ✭ «ЧПУ24»
В современном мире автоматизация производства является не элементом роскоши, а осознанной необходимостью. Хотя в нашей стране стоимость человеческого труда достаточно низкая и нет предпосылок к увеличению ее стоимости в ближней и среднесрочной перспективе, ЧПУ станки даже в этой ситуации выигрывают у человека.
Станок не уходит в отпуск и декрет, ему не нужны выходные, он не опаздывает и не прогуливает, его работоспособность не зависит от настроения и вчерашней вечеринки с друзьями. Каждое предприятие заинтересовано во внедрении высокоэффективных технологий. Поэтому подбирает надежное, функциональное оборудование для выполнения таких работ как фрезерные, токарные, раскрой металла, дерева, фанеры с помощью лазера, нанесению маркировки и гравировки на изделия и многие другие.
Поэтому подбирает надежное, функциональное оборудование для выполнения таких работ как фрезерные, токарные, раскрой металла, дерева, фанеры с помощью лазера, нанесению маркировки и гравировки на изделия и многие другие.
В этой статье мы расскажем, про ЧПУ станки, их виды, устройство конструкции, принцип работы. Предоставим основную информацию, чтобы вы могли решить, нужна вам такая техника или нет.
Станки с ЧПУ: что это такое?
Давайте разберемся, что такое ЧПУ станок, и какая расшифровка аббревиатуры. ЧПУ это числовое программное управление. Представляет собой компьютеризированную систему, которая направлена на проведение расчетов и автоматизацию технических операций. Контроль выполняется специальными командами ‒ G-кодами. Систему можно запрограммировать с внешних носителей или подключить к компьютеру.
Состоит из таких элементов:
- пульт оператора;
- дисплей;
- контроллер;
- ПЗУ ‒ память долговременного хранения;
- ОЗУ ‒ временное хранение программ, используемых в настоящий момент.


Многих интересует вопрос: что делает ЧПУ станок? Он относится к самому востребованному оборудованию основных сфер промышленности. Считается дорогой, инновационной техникой. На нем обрабатывают металл, обтачивают сложные заготовки, изготавливают корпусную мебель, пластиковые игрушки, сувениры. Устройство позволяет с высокой точностью выполнить даже самые сложные работы. Изготавливает детали, к которым выдвигаются самые строгие требования касаемо точности размеров и допусков. Компьютеризация и автоматизация исключает ошибки, присущие человеческому фактору. Если правильно пользоваться устройством, риск бракованной продукции снизится к нулю.
Возьмем для примера фрезерный станок и изготовление панно.
Для того чтобы изготовить такое панно, раньше человек должен был обладать художественным видением, чтобы вручную или используя полуавтоматический инструмент отсечь от заготовки все лишнее. Если нужно было изготовить таких штук 10, то это превращалось из творческого процесса в некую рутину для мастера. Все изделия были разными и непохожими друг на друга. Человек мог заболеть или потерять интерес. Могла дрогнуть рука мастера и т.д. Сегодня, при наличии 3D модели такого панно, любой человек, даже не обладающий художественным видением с помощью ЧПУ станка способен изготавливать такие изделия. Творчество все равно присутствует т.к. создание 3D модели — это творческий процесс, доступный немногим и неважно, что на выходе у вас будет физическая модель, воплощенная дереве или на компьютере. После того как мы выбрали модель для изготовления, нам нужно «рассказать» станку что необходимо делать – составить управляющую программу (УП). В ней мы сообщаем станку, какого размера заготовка, каким инструментом мы это делаем, с какой скоростью, где начать и где закончить и т.д. Этим в зависимости от компании и организации рабочего процесса может заниматься как оператор станка, так и отдельный технолог. Также работа оператора заключается в установке заготовки и рабочего инструмента (при его наличии), запуске станка, съеме готового изделия.
Все изделия были разными и непохожими друг на друга. Человек мог заболеть или потерять интерес. Могла дрогнуть рука мастера и т.д. Сегодня, при наличии 3D модели такого панно, любой человек, даже не обладающий художественным видением с помощью ЧПУ станка способен изготавливать такие изделия. Творчество все равно присутствует т.к. создание 3D модели — это творческий процесс, доступный немногим и неважно, что на выходе у вас будет физическая модель, воплощенная дереве или на компьютере. После того как мы выбрали модель для изготовления, нам нужно «рассказать» станку что необходимо делать – составить управляющую программу (УП). В ней мы сообщаем станку, какого размера заготовка, каким инструментом мы это делаем, с какой скоростью, где начать и где закончить и т.д. Этим в зависимости от компании и организации рабочего процесса может заниматься как оператор станка, так и отдельный технолог. Также работа оператора заключается в установке заготовки и рабочего инструмента (при его наличии), запуске станка, съеме готового изделия.
Виды станков
Оборудование делится на несколько групп, которые отличаются способностью выполняемых операций. Виды станков с ЧПУ по типу воздействия на обрабатываемый материал:
- фрезерные, сверлильные, расточные ‒ используют для резки заготовок, раскроя листов, загибания углов, сверления отверстий;
- токарные ‒ для обработки наружной и внутренней поверхности, выполняют нарезку резьбы, позволяют создавать любые контуры.
- зубообрабатывающие ‒ позволяют создать необходимую геометрию шестеренок и других деталей;
- шлифовальные ‒ зачищают и выравнивают поверхность на конечном этапе обработки;
- многоцелевые ‒ сочетают в себе возможность выполнения всех видов работ;
- электромеханические ‒ включают в себя плазменные, лазерные, электрохимические, электроэрозионные агрегаты.

Фрезерный станок применяют на производстве, где важно соблюдать параметры точности. Бывает с вертикальным и горизонтальным расположением шпинделя. Работает с высокой скоростью. Есть габаритные и компактные модели.
Лазерный станок — это общее название станков, обработка материала на которых производится при помощи лазерного излучения (луча). Но источник этого излучения и соответственно его характеристики различаются. Например, источником луча может быть лазерная трубка с закаченной смесью различных газов основной из которых СО2. Это линейка станков применяется для обработки широкого спектра материалов, реже металла. Потому как длина волны лазерного излучения способна воздействовать на металл на мощности трубки от 100 вт. Обработка цветных металлов практически исключена. Для обработки металла, в том числе и цветного, используются лазеры с источниками на иттербиевого оптоволокна. Если мощность источника 10вт – 100вт, то их используют для маркировки и нанесения гравировки.
Плазменный предназначен для точного и качественного раскроя листов из металла любой толщины.
Основные характеристики
Те, кто знают, что такое ЧПУ в современных станках, уже давно оценили его преимущества. Оборудование значительно увеличивает производительность труда. Удешевляет себестоимость товаров. Один ЧПУ станок заменяет до 6 единиц обычных. Может бесперебойно работать многие годы, отменно выполняя заданные команды. Для обработки разных деталей нужно просто заменить программу. Устройство позволяет быстро изготовить спроектированное на компьютере изделие. Отличается надежностью, разнообразием функций, гибкостью настроек, точностью обработки. Благодаря данным характеристикам станки ЧПУ широко применяются на производствах, которые стремятся увеличить объемы выпускаемой продукции.
Объяснение G-кода | Список наиболее важных команд G-кода
Если ваша работа или хобби связаны со станками с ЧПУ или 3D-принтерами, то понимание того, что такое G-код и как он работает, для вас крайне важно. Итак, в этом уроке мы изучим основы языка G-кода, какие самые важные или распространенные команды G-кода и объясним, как они работают.
Что такое G-код?
G-код — это язык программирования для станков с числовым программным управлением (ЧПУ). G-код означает «геометрический код». Мы используем этот язык, чтобы сказать машине, что делать или как что-то делать. Команды G-кода указывают машине, куда двигаться, как быстро двигаться и по какому пути следовать.
В случае станка, такого как токарный станок или фрезерный станок, режущий инструмент приводится в действие этими командами, чтобы следовать определенной траектории инструмента, вырезая материал для получения желаемой формы.
Аналогично, в случае аддитивного производства или 3D-принтеров команды G-кода предписывают машине наносить материал слой за слоем, формируя точную геометрическую форму.
Как читать команды G-кода?
На первый взгляд, когда вы видите файл G-кода, он может показаться довольно сложным, но на самом деле его не так уж сложно понять.
Если внимательно посмотреть на код, то можно заметить, что большинство строк имеют одинаковую структуру. Кажется, что «сложная» часть G-кода — это все те числа, которые мы видим, которые являются просто декартовыми координатами.
Давайте рассмотрим одну строку и объясним, как она работает.
G01 X247.951560 Y11.817060 Z-1.000000 F400.000000
Эта строка имеет следующую структуру:0008, а в данном случае это G01 , что означает «движение по прямой линии в определенное положение».
В завершение строка G01 X247. 951560 Y11.817060 Z-1.000000 F400 сообщает станку с ЧПУ двигаться по прямой от текущего положения к координатам X247.9.51560, Y11.817060 и Z-1.000000 со скоростью 400 мм/мин. Единицей является мм/мин, потому что, если мы вернемся к примеру изображения G-кода, мы увидим, что мы использовали команду G21, которая устанавливает единицы измерения в миллиметры. Если нам нужны единицы измерения в дюймах, вместо этого мы используем команду G20.
951560 Y11.817060 Z-1.000000 F400 сообщает станку с ЧПУ двигаться по прямой от текущего положения к координатам X247.9.51560, Y11.817060 и Z-1.000000 со скоростью 400 мм/мин. Единицей является мм/мин, потому что, если мы вернемся к примеру изображения G-кода, мы увидим, что мы использовали команду G21, которая устанавливает единицы измерения в миллиметры. Если нам нужны единицы измерения в дюймах, вместо этого мы используем команду G20.
Наиболее важные/общие команды G-кода
Итак, теперь, когда мы знаем, как читать строку G-кода, мы можем взглянуть на наиболее важные или часто используемые команды G-кода. Мы узнаем, как каждый из них работает на нескольких примерах, и к концу этого урока мы сможем полностью понять, как работает G-код, как его читать, как модифицировать и даже как написать собственный G-код.
G00 – Быстрое позиционирование
Команда G00 перемещает машину с максимальной скоростью перемещения из текущего положения в указанную точку или координаты, указанные командой.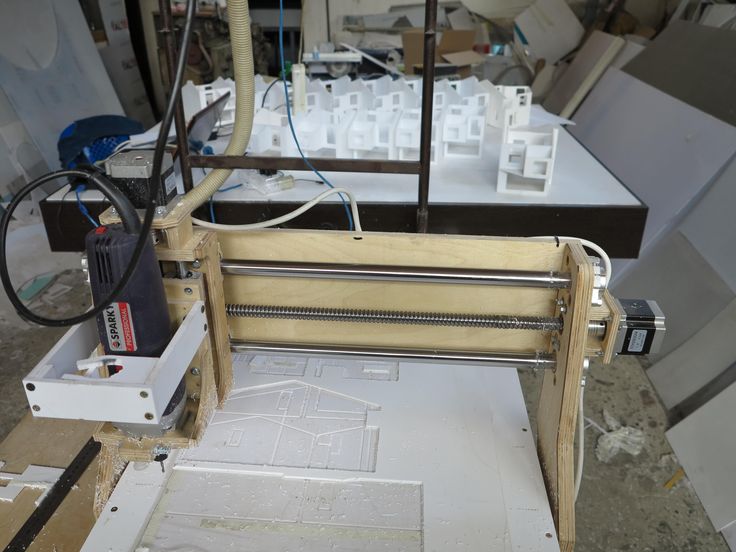 Станок будет перемещать все оси одновременно, поэтому они совершают перемещение одновременно. Это приводит к прямолинейному движению к новой точке положения.
Станок будет перемещать все оси одновременно, поэтому они совершают перемещение одновременно. Это приводит к прямолинейному движению к новой точке положения.
G00 — это нережущее движение, и его цель — просто быстро переместить машину в нужное положение, чтобы начать какую-либо работу, например резку или печать.
G01 – Линейная интерполяция
Команда G-кода G01 дает указание станку двигаться по прямой линии с заданной подачей или скоростью. Мы указываем конечное положение со значениями X , Y и Z , а скорость со значением F . Контроллер машины вычисляет (интерполирует) промежуточные точки, через которые нужно пройти, чтобы получить эту прямую линию. Хотя эти команды G-кода просты и интуитивно понятны, за ними контроллер станка выполняет тысячи вычислений в секунду, чтобы выполнять эти движения.
В отличие от команды G00, которая используется только для позиционирования, команда G01 используется, когда станок выполняет свою основную работу. В случае токарного станка или фрезерного станка резка материала по прямой линии, а в случае 3D-принтера — экструдирование материала по прямой линии.
В случае токарного станка или фрезерного станка резка материала по прямой линии, а в случае 3D-принтера — экструдирование материала по прямой линии.
G02 – Круговая интерполяция по часовой стрелке
Команда G02 указывает машине двигаться по часовой стрелке по круговой схеме. Это та же концепция, что и у команды G01, и она используется при выполнении соответствующего процесса обработки. В дополнение к параметрам конечной точки здесь также необходимо определить центр вращения или расстояние начальной точки дуги от центральной точки дуги. Начальная точка на самом деле является конечной точкой предыдущей команды или текущей точкой.
Для лучшего понимания мы добавим команду G02 после команды G01 из предыдущего примера.
Итак, в примере сначала у нас есть команда G01, которая перемещает станок в точку X5, Y12. Теперь это будет отправной точкой для команды G02. С помощью параметров X и Y команды G02 мы устанавливаем конечную точку. Теперь, чтобы добраться до этой конечной точки, используя круговое движение или дугу, нам нужно определить ее центральную точку.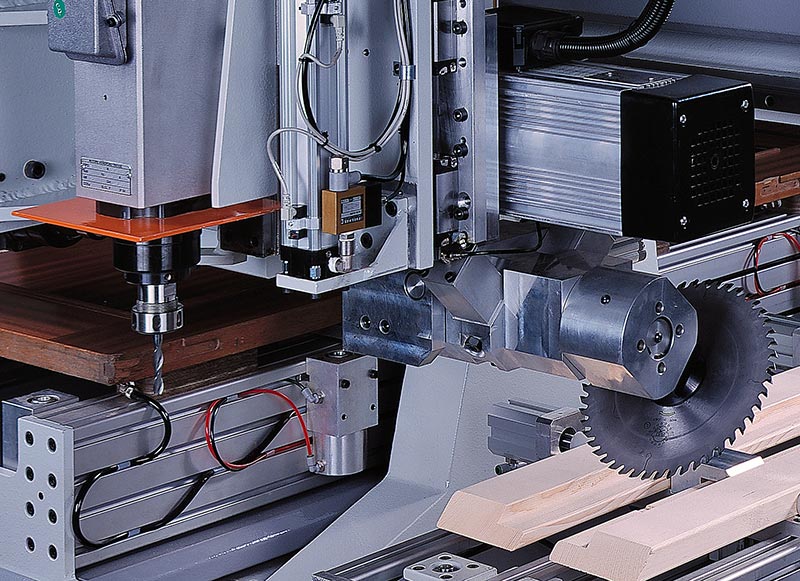 Мы делаем это, используя параметры I и J. Значения I и J относятся к начальной или конечной точке предыдущей команды. Итак, чтобы получить центральную точку на X5 и Y7, нам нужно сделать смещение на 0 по оси X и смещение -5 по оси Y.
Мы делаем это, используя параметры I и J. Значения I и J относятся к начальной или конечной точке предыдущей команды. Итак, чтобы получить центральную точку на X5 и Y7, нам нужно сделать смещение на 0 по оси X и смещение -5 по оси Y.
Конечно, мы можем установить центральную точку в любом другом месте, таким образом, мы получим другую дугу, которая заканчивается в той же конечной точке. Вот пример этого:
Итак, здесь у нас по-прежнему та же конечная точка, что и в предыдущем примере (X10, Y7), но центральная точка теперь находится в другом положении (X0, Y2). Благодаря этому мы получили более широкую дугу по сравнению с предыдущей.
См. также: Как настроить GRBL и управлять станком с ЧПУ с помощью Arduino
G00, G01, G02 Пример – Программирование G-кода вручную
Давайте рассмотрим простой пример фрезерной обработки с ЧПУ, используя эти три основные команды G-кода, G00, G01 и G02.
Чтобы получить траекторию для фигуры, показанной на изображении выше, нам нужно выполнить следующие команды G-кода:
Кодовый язык: Arduino (arduino)
G00 X5 Y5 ; точка Б G01 X0 Y20 F200 ; точка С G01 X20 Y0 ; точка Д G02 X10 Y-10 I0 J-10 ; точка Е G02 X-4 Y-8 I-10 J0 ; точка F G01 X-26 Y-2 ; точка Б
Первой командой G00 мы быстро переводим машину из исходного или исходного положения в точку B(5,5).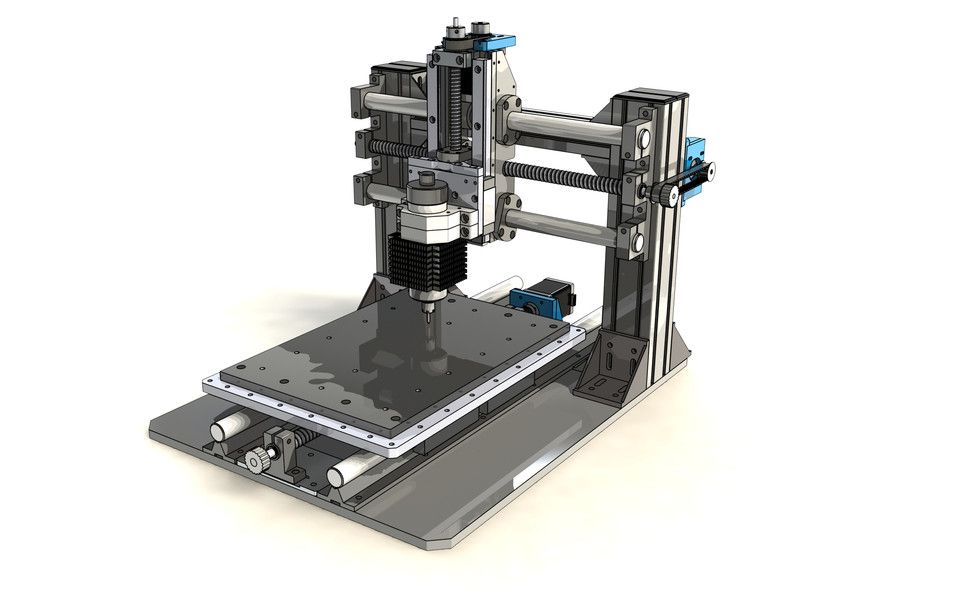 Отсюда мы начинаем с «резки» со скоростью подачи 200, используя команду G01 . Здесь мы можем отметить, что для перехода из точки B(5,5) в точку C(5,25) мы используем значения для X и Y относительно начальной точки B. Таким образом, +20 единиц в направлении Y приведут нас к точке C(5,25). На самом деле это зависит от того, выбрали ли мы машину для интерпретации координат как абсолютных или относительных. Мы объясним это в следующем разделе.
Отсюда мы начинаем с «резки» со скоростью подачи 200, используя команду G01 . Здесь мы можем отметить, что для перехода из точки B(5,5) в точку C(5,25) мы используем значения для X и Y относительно начальной точки B. Таким образом, +20 единиц в направлении Y приведут нас к точке C(5,25). На самом деле это зависит от того, выбрали ли мы машину для интерпретации координат как абсолютных или относительных. Мы объясним это в следующем разделе.
Как только мы достигнем точки C(5,25), у нас есть еще одна команда G01 для достижения точки D(25,25). Затем мы используем команду G02, круговое движение, чтобы добраться до точки E(35,15) с центральной точкой (25,15). На самом деле у нас есть та же самая центральная точка (25,15) для следующей команды G02, чтобы добраться до точки F(31,7). Тем не менее, мы должны отметить, что параметры I и J отличаются от предыдущей команды, потому что мы смещаем центр от последней конечной точки или точки E. Мы завершаем траекторию с помощью другой команды G01, которая перемещает нас из точки F (31, 7) вернуться к точке B(5,5).
Итак, вот как мы можем вручную запрограммировать G-код для создания этой формы. Однако мы должны отметить, что это не полный G-код, потому что нам не хватает еще нескольких основных команд. Мы создадим полный G-код в следующем примере, так как сначала нам нужно объяснить эти команды G-кода.
G03 – круговая интерполяция против часовой стрелки
Так же, как и G02, команда G-кода G03 определяет движение машины по круговой схеме. Единственная разница здесь в том, что движение происходит против часовой стрелки. Все остальные функции и правила аналогичны команде G02.
Таким образом, с помощью этих трех основных команд G-кода, G01 , G02 и G03 , мы можем сгенерировать траекторию буквально для любой формы, которую захотим. Вам может быть интересно, как это возможно, но на самом деле это простая задача для компьютера и программного обеспечения CAM. Да, иногда мы можем вручную создать программу G-кода, но в большинстве случаев мы делаем это с помощью соответствующего программного обеспечения, которое намного проще и безопаснее.
Тем не менее, теперь объясните еще несколько важных и часто используемых команд и в конце приведите реальный пример G-кода.
G20/G21 – выбор единиц измерения
Команды G20 и G21 определяют единицы G-кода, дюймы или миллиметры.
- G20 = дюймы
- G21 = миллиметры
Необходимо отметить, что единицы измерения должны быть установлены в начале программы. Если мы не укажем единицы измерения, машина будет считать значения по умолчанию, установленные предыдущей программой.
G17/ G18/ G18 – Выбор плоскости G-кода
С помощью этих команд G-кода мы выбираем рабочую плоскость станка.
- G17 — плоскость XY
- G18 — плоскость XZ
- G19 — плоскость YZ
G17 используется по умолчанию для большинства станков с ЧПУ, но два других также можно использовать для выполнения определенных перемещений.
G28 – Возврат домой
Команда G28 указывает станку переместить инструмент в исходную точку или исходное положение.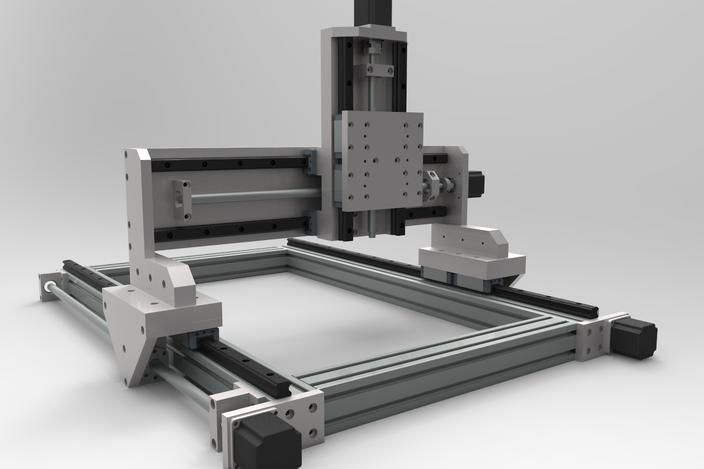 Чтобы избежать столкновения, мы можем включить промежуточную точку с параметрами X, Y и Z. Инструмент пройдет через эту точку, прежде чем перейти к контрольной точке.
Чтобы избежать столкновения, мы можем включить промежуточную точку с параметрами X, Y и Z. Инструмент пройдет через эту точку, прежде чем перейти к контрольной точке. G28 X## Y## Z##
Исходное положение можно определить с помощью команды G28.1 X## Y## Z## .
G90/G91 – Команды G-кода позиционирования
С помощью команд G90 и G91 мы сообщаем машине, как интерпретировать координаты. G90 для абсолютного режима и G91 для относительного режима .
В абсолютном режиме позиционирование инструмента всегда происходит от абсолютной точки или нуля. Итак, команда G01 X10 Y5 приведет инструмент точно в эту точку (10,5), независимо от предыдущей позиции.
С другой стороны, в относительном режиме инструмент позиционируется относительно последней точки. Таким образом, если станок в данный момент находится в точке (10,10), команда G01 X10 Y5 переместит инструмент в точку (20,15). Этот режим также называют «инкрементным режимом».
Этот режим также называют «инкрементным режимом».
Другие команды и правила
Таким образом, команды G-кода, которые мы объяснили выше, являются наиболее распространенными, но их гораздо больше. Имеются такие команды, как компенсация на режущий инструмент, масштабирование, рабочие системы координат, выдержка и т. д.
В дополнение к G-коду существуют также команды М-кода, которые используются при создании реальной полноценной программы G-кода. Вот несколько распространенных команд M-кода:
- M00 – Останов программы
- M02 – Конец программы
- M03 – Включение шпинделя – по часовой стрелке
- M04 – Включение шпинделя – против часовой стрелки
- M05 – Остановка шпинделя M06 – Инструмент изменить
- M08 – Подача охлаждающей жидкости ВКЛ.
- M09 – Подача охлаждающей жидкости ВЫКЛ.
- M30 – Конец программы
В случае 3D-принтера:
- M104 — Запустить нагрев экструдера
- M109 — Подождать, пока экструдер достигнет T0
- M140 — Запустить нагрев платформы
- M190 — Подождать, пока платформа достигнет T4 9003 9003
Некоторым из этих команд требуются соответствующие параметры.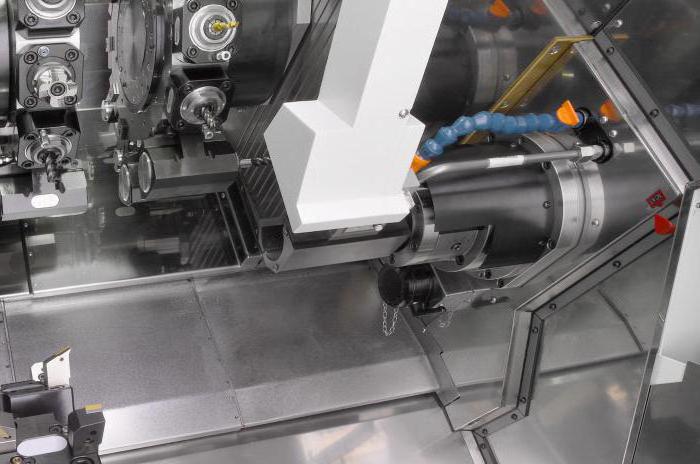 Например, при включении шпинделя с помощью M03 мы можем установить скорость шпинделя с помощью параметра S. Итак, строка
Например, при включении шпинделя с помощью M03 мы можем установить скорость шпинделя с помощью параметра S. Итак, строка M30 S1000 включит шпиндель на скорость 1000 об/мин.
Мы также можем отметить, что многие коды являются модальными , что означает, что они остаются в силе до тех пор, пока не будут отменены или заменены другим кодом. Например, скажем, у нас есть код линейного резания G01 X5 Y7 F200 . Если следующим движением снова будет линейная резка, мы можем просто ввести координаты X и Y без надписи G01 впереди.
Язык кода: Arduino (arduino)
G01 X5 Y7 F200 Х10 У15 Х12 У20 G02 X5 Y5 I0 J-5 X3 Y6 I-2 J0
То же самое относится к параметру скорости подачи F. Нам не нужно включать его в каждую строку, если только мы не хотим изменить его значение.
В некоторых файлах G-кода вы также можете увидеть « N## » перед командами. Слово N просто для нумерации строки или блока кода. Это может быть полезно для определения конкретной строки в случае ошибки в огромной программе.
Пример программы простого G-кода
Тем не менее, после прочтения всего этого, теперь мы можем вручную сделать настоящий, актуальный код. Вот пример:
Язык кода: Arduino (arduino)
% G21 G17 G90 F100 М03 С1000 G00 X5 Y5 ; точка Б G01 X5 Y5 Z-1 ; точка Б G01 X5 Y15 Z-1 ; точка С G02 X9 Y19 Z-1 I4 J0 ; точка Д G01 X23 Y19 Z-1 ; точка Е G01 X32 Y5 Z-1 ; точка F G01 X21 Y5 Z-1 ; точка G G01 X21 Y8 Z-1 ; точка Н G03 X19 Y10 Z-1 I-2 J0 ; пункт я G01 X13 Y10 Z-1 ; точка J G03 X11 Y8 Z-1 I0 J-2 ; точка К G01 X11 Y5 Z-1 ; точка L G01 X5 Y5 Z-1 ; точка Б G01 X5 Y5 Z0 G28 X0 Y0 М05 М30 %
Описание программы G-code:
- Инициализация кода. Этот символ (%) всегда присутствует в начале и в конце программы.
- Линия безопасности: Задайте программирование в метрической системе (все размеры в мм), плоскость XY, абсолютное позиционирование и скорость подачи 100 дюймов/мин.
- Шпиндель по часовой стрелке со скоростью 1000 об/мин.
- Быстрое позиционирование на B(5,5).
- Управляемое движение в том же положении, но с опусканием инструмента на -1.
- Линейное режущее движение в положение C(5,15).
- Круговое движение по часовой стрелке к точке D(9,19) с центром в точке (9,15).
- Линейная резка до точки E(23,19).
- Линейная резка до точки F(32,5).
- Тот же прямой рез до точки G(21,5).
- Еще один прямой рез до точки H(21,8).
- Круговая интерполяция против часовой стрелки в позицию I(19,10) с центром в точке (19,8).
- Линейная резка до точки J(13,10).
- Круговая резка против часовой стрелки до позиции K(11,8) с центром в (13,8).
- Линейная резка в положение L(11,5).
- Окончательное линейное движение резки в положение B(5,5).
- Поднимите инструмент.
- Перейти в исходное положение.
- Шпиндель выключен.
- Конец основной программы.
 Этот символ (%) всегда присутствует в начале и в конце программы.
Этот символ (%) всегда присутствует в начале и в конце программы.
Вот как выглядит этот код, готовый к отправке на наш станок с ЧПУ через программное обеспечение Universal G-code Sender:
Итак, используя эти основные команды G-кода, описанные выше, нам удалось написать собственный полноценный G-код. код. Конечно, этот пример довольно прост, и для более сложных форм нам определенно нужно использовать программное обеспечение CAM. Вот пример сложного G-кода формы Лошади:
Для сравнения, в этом коде около 700 строк, но все они сгенерированы автоматически. G-код был создан с использованием Inkscape в качестве примера для моего самодельного станка для резки пенопласта Arduino с ЧПУ. Вот как получилась форма:
Более подробную информацию об этой машине вы можете найти в моем конкретном руководстве.
Заключение
Итак, мы рассмотрели основы G-кода, объяснили наиболее важные и распространенные команды G-кода и вручную создали собственный настоящий G-код. В конце концов, я думаю, что понять G-код не так уж сложно. Конечно, существует так много других команд и функций, используемых в обработке с ЧПУ или 3D-печати, о которых мы должны знать, но подробнее об этом в некоторых других руководствах.
Если эта статья оказалась вам полезной, поделитесь ею с другими любителями ЧПУ и 3D-печати. Также не стесняйтесь задавать любые вопросы в разделе комментариев ниже.
Кодировщики станков с ЧПУ| Quantum Devices
Энкодеры используются в станках с ЧПУ для обеспечения обратной связи по положению во время использования, чтобы убедиться, что станок работает с соответствующей скоростью и точностью для работы.
Энкодер — это электромеханическое устройство обратной связи по положению, которое преобразует данные о перемещении в электрические сигналы. Эта цифровая обратная связь используется контроллером машины для определения положения, скорости или направления, чтобы он мог выдавать команды для выполнения определенной функции.
Quantum Devices производит высококачественные высокопроизводительные инкрементальные оптические энкодеры, подходящие для широкого спектра приложений управления движением, включая обработку с ЧПУ.
Связаться с нами Купить онлайн
Использование энкодеров в станках с ЧПУ
В станках с ЧПУ используются бесщеточные двигатели постоянного тока (BLCD), которые требуют электронной коммутации. Датчики вращения в станках с ЧПУ обеспечивают обратную связь в режиме реального времени об угле вала двигателя BLDC. Данные об угле поворота вала отправляются на сервопривод, который переключает токи, чтобы включать и выключать обмотки статора, вращая ротор.
Скорость шпинделя
Датчики вращения используются для контроля скорости шпинделя (оборотов в минуту, об/мин) при обработке с ЧПУ. Точное управление скоростью шпинделя в зависимости от используемого инструмента и материалов имеет решающее значение, если вы хотите оптимизировать подачу и скорость, срок службы инструмента, качество обработки поверхности и энергоэффективность.
Серводвигатели
Серводвигатели обычно используются в токарных станках с ЧПУ и при 3-осевой обработке для перемещения шпинделей и столов по осям X, Y и Z. Серводвигатель вращает вал ротора, который перемещает шпиндель или стол. Вращающиеся оптические энкодеры обеспечивают обратную связь о скорости и расстоянии перемещения вала, поскольку частота и число строк (разрешение) используются для расчета оборотов в минуту.
Точность
Индексные импульсы инкрементного энкодера обычно используются для точного возврата в исходное положение. Примером может служить ходовой винт, возвращающий каретку к концевому выключателю. Концевые выключатели по своей природе замыкаются в относительно неточных точках, что обеспечивает лишь приблизительную точку отсчета. Затем машина может вращать ходовой винт до тех пор, пока импульс Z не станет высоким. Для инкрементного энкодера с числом строк 5000 это будет означать точность в пределах 0,072 механического градуса (1/5000 оборота). Это число умножается на ход ходового винта.
Это число умножается на ход ходового винта.
Роботизированная обработка
Датчики вращения используются в мобильной робототехнике для получения данных о двигателе, коробке передач и скорости, ускорении и положении отдельных колес. Вращающиеся энкодеры также используются в приложениях роботизированной обработки, выступая в качестве вторичных энкодеров, установленных на каждом соединении для обеспечения обратной связи с серводвигателем, управляющим каждой осью. Это позволяет роботам точно выполнять задачи типа фрезерования и сверления в приложениях, где классический станок был бы несовместим с рабочей средой (например, при сборке крупных компонентов для самолетов).
Полностью закрытый поворотный энкодер, модель QR145
Неблагоприятные условия
Рабочие зоны обрабатывающих центров и промышленные площадки, на которых выполняются операции механической обработки, часто имеют суровые условия окружающей среды. Компания Quantum Devices разработала полностью закрытый оптический поворотный энкодер, подходящий для суровых производственных условий, включая удары, вибрацию, влажность, электромагнитные помехи, пыль, масло, воду, металлическую стружку и другой мусор. энкодеры.
энкодеры.
Дополнительные примеры применения поворотных энкодеров в станках с ЧПУ включают:
- Токарный энкодер
- Оптический энкодер для 5-осевой обработки
- Инкрементальный энкодер для автоматики токарного станка
- Кодировщик двигателя шпинделя с ЧПУ
- Энкодер контроллера ЧПУ
- Револьверный энкодер с ЧПУ
- Импульсный энкодер с маховиком ЧПУ
- Датчик двигателя с ЧПУ
- Энкодер фрезерного станка
- Датчик положения станка
- Кодер машинного цикла
Инженеры Quantum Devices будут рады помочь вам выбрать лучший энкодер для вашего конкретного приложения с ЧПУ. Чтобы дать рекомендацию, нам потребуется конкретная информация, включая:
- Разрешение/количество строк
- Коммутация? (да/нет)
- Количество полюсов
- Тип вала (полый/сплошной)
- Диаметр вала
- Диаметр окружности болта
- Тип крепления
- Рабочее напряжение
- Рабочая температура (диапазон)
- Максимальная температура
- Максимальное число оборотов в минуту
- Описание приложения
Если кодировщик уже используется для вашего приложения, укажите марку и номер модели.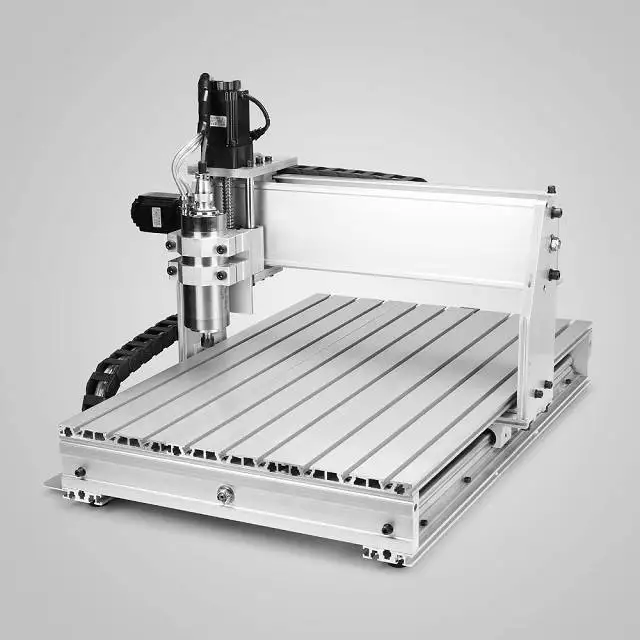 Quantum Devices предлагает несколько вариантов прямой замены продуктов других производителей, а также мы можем предоставить индивидуальные конфигурации кодировщика.
Quantum Devices предлагает несколько вариантов прямой замены продуктов других производителей, а также мы можем предоставить индивидуальные конфигурации кодировщика.
Высокопроизводительные энкодеры для приложений с ЧПУ
Как производитель и поставщик оптических энкодеров, компания Quantum Devices предлагает решения для энкодеров для ряда приложений с ЧПУ, включая автоматизацию производства с ЧПУ и промышленное управление с ЧПУ.
Почему квантовые устройства?
Кодировщики Quantum Devices производятся в США, и у нас есть производственные мощности для удовлетворения как краткосрочных, так и долгосрочных потребностей. Постоянные инновации в нашей линейке продуктов обеспечивают повышенную точность, повторяемость и контроль ускорения/скорости. Что отличает нас от других производителей энкодеров, так это наша приверженность собственному проектированию и производству.
Компания Quantum Devices уже более трех десятилетий также производит собственные фотодиоды и стеклянные диски.